
관행
지난 섹션에서는 광학 센서의 작동 원리와 이 센서에서 얻은 데이터를 코드에서 사용하여 로봇이 특정 색상의 버키볼을 찾는 등의 작업을 완료하도록 하는 방법을 알아보았습니다. 또한 [만약 그렇다면] 및 [반복]과 같은 제어 블록을 사용하여 로봇이 결정을 내리는 방법도 배웠습니다. 이제 광학 센서를 사용하여 클로봇을 코딩하는 데 배운 내용을 적용하여 Eye Spy Treasure 활동을 완료할 것입니다.
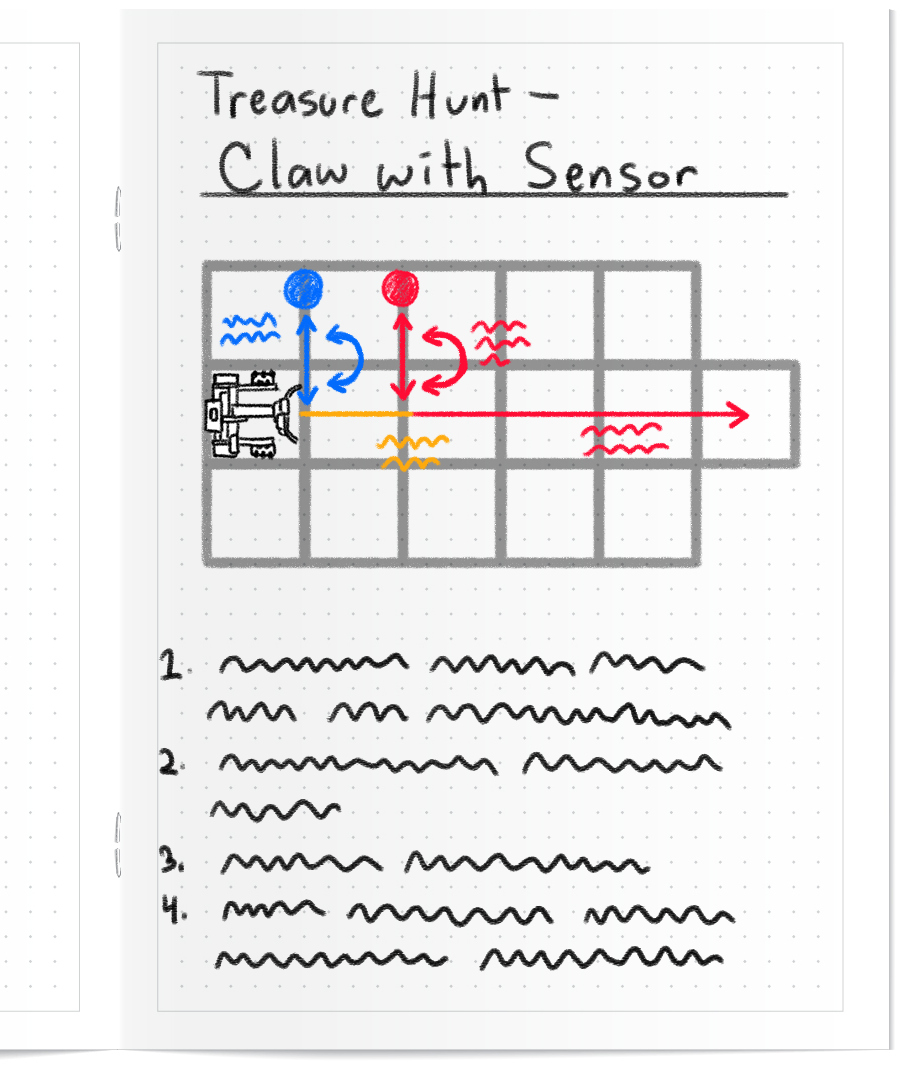
이 활동에서 로봇은 서로 다른 두 개의 버키볼을 향해 운전하고 광학 센서를 사용하여 각 버키볼의 색상을 감지합니다. 버키볼이 빨간색이면 로봇이 집게발로 버키볼을 모아 홈 존으로 옮겨야 합니다.
아래 영상을 시청하고, 배운 내용을 적용하여 Eye Spy Treasure 연습 활동을 완료하는 방법을 알아보세요.
이제 Eye Spy Treasure 연습 활동을 완료할 차례입니다!
이 애니메이션에서 로봇은 광학 센서로 각 버키볼을 확인하기 위해 자율적으로 움직이지만, 홈 존으로 옮기기 위해 빨간색 버키볼만 집어 올립니다. 로봇이 Eye Spy Treasure 연습 활동을 완료하기 위해 취할 수 있는 가능한 경로 중 하나를 보려면 이 애니메이션을 시청하세요.
이 문서의 단계에 따라 이 활동을 완료하세요.
Eye Spy Treasure 연습 활동을 완료하면 엔지니어링 노트에 조사 결과를 기록하세요.
- 로봇이 각각의 버키볼까지 이동하려면 얼마나 많은 거리가 필요할지 생각해 보세요.
- 로봇이 빨간색 버키볼을 감지했을 때 무엇을 해야 할지 생각해 보세요.
결과를 기록하는 방법에 대한 예를 보려면 이 이미지를 보세요.
도전 활동 준비
경쟁(다음 페이지)에서는 로봇이 자율적으로 버키볼을 확인하고 빨간색 버키볼만 모아 홈 존으로 옮기도록 코드를 작성합니다. Treasure Mover Challenge에 참가하는 방법을 알아보고, 이해도를 확인한 다음, 챌린지를 위해 연습해 보세요.