
Pratica
Nell' ultima sezione, hai imparato come funziona il sensore ottico e come puoi utilizzare i dati di questo sensore nel tuo codice per far completare al tuo robot un'attività, come trovare colori specifici di Buckyballs. Hai anche imparato come i blocchi di controllo come [If then] e [Repeat] possono essere utilizzati per far prendere decisioni al tuo robot. Ora applicherai ciò che hai imparato per codificare il tuo Clawbot con un sensore ottico per completare l'attività Eye Spy Treasure.
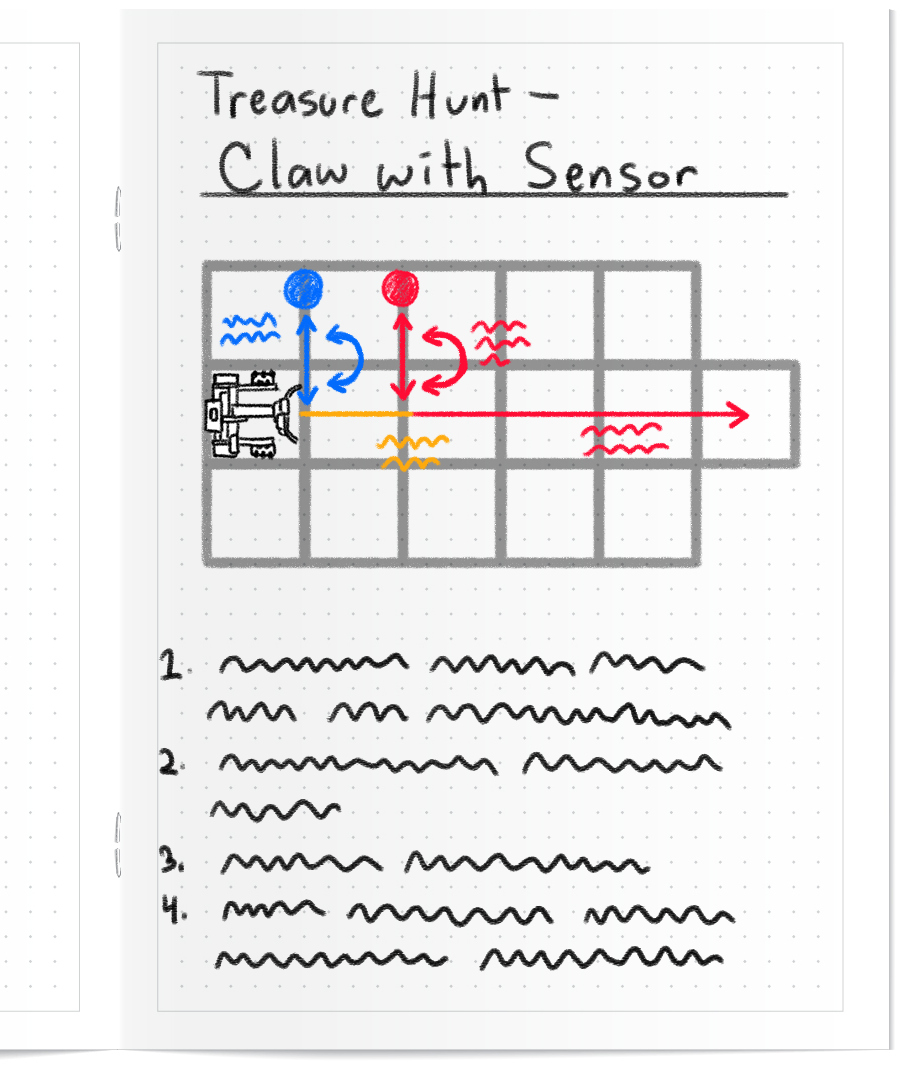
In questa attività, il tuo robot guiderà verso due diverse Buckyball e utilizzerà il sensore ottico per rilevare il colore di ciascuna. Se la Buckyball è rossa, il tuo robot dovrebbe raccoglierla con l'artiglio e spostarla nella Home Zone.
Guarda il video qui sotto per vedere come puoi applicare ciò che hai imparato per completare l'attività pratica Eye Spy Treasure.
Ora tocca a te completare l'attività pratica Eye Spy Treasure!
In questa animazione, il robot si muove autonomamente per controllare ogni Buckyball con il sensore ottico, ma raccoglie solo il Buckyball rosso per spostarlo nella zona home. Guarda questa animazione per vedere un possibile percorso che il tuo robot potrebbe intraprendere per completare l'attività pratica Eye Spy Treasure.
Segui i passaggi in questo documento per completare questa attività.
Mentre completi l'attività pratica Eye Spy Treasure, documenta le tue scoperte nel tuo quaderno di ingegneria.
- Pensa alle distanze che il robot dovrà percorrere per raggiungere ciascuna delle Buckyball.
- Pensa a cosa dovrà fare il robot quando rileverà una Buckyball rossa.
Visualizza questa immagine per un esempio di come puoi registrare i tuoi risultati.
Preparati per l'attività Sfida
In Compete (nella pagina successiva), codificherai il tuo robot per controllare autonomamente le Buckyball e raccogliere e spostare solo la Buckyball rossa nella Home Zone. Scopri come competere nella Treasure Mover Challenge, verifica la tua comprensione, quindi esercitati per la sfida.
L'obiettivo di questa sfida è far sì che il tuo robot guidi autonomamente per controllare le Buckyball sul campo e raccogliere la Buckyball rossa e spostarla nella Home Zone nel minor tempo possibile.
Guarda questa animazione per vedere un esempio di come il tuo robot potrebbe muoversi in una corsa di successo della sfida.
Questo è solo uno dei possibili percorsi che il tuo robot potrebbe intraprendere per completare la Treasure Mover Challenge.
Segui i passaggi in questo documento per saperne di più su come completare questa attività. Google / .docx / .pdf
Verifica la tua comprensione
Prima di iniziare la sfida, assicurati di aver compreso le regole e le impostazioni rispondendo alle domande nel documento seguente nel tuo quaderno di ingegneria.
Controlla la tua comprensione domande Google / .docx / .pdf
Dopo aver completato le domande, esercitati per la sfida.
Seleziona Avanti > per competere nella Sfida Treasure Mover.