
Oefening
In het vorige gedeelte hebt u geleerd hoe de optische sensor werkt en hoe u gegevens van deze sensor in uw code kunt gebruiken om uw robot een taak te laten voltooien, zoals het vinden van Buckyballs in specifieke kleuren. Je hebt ook geleerd hoe je besturingsblokken zoals [Als dan] en [Herhalen] kunt gebruiken om je robot beslissingen te laten nemen. Nu ga je toepassen wat je hebt geleerd om je Clawbot te programmeren met een optische sensor om de Eye Spy Treasure-activiteit te voltooien.
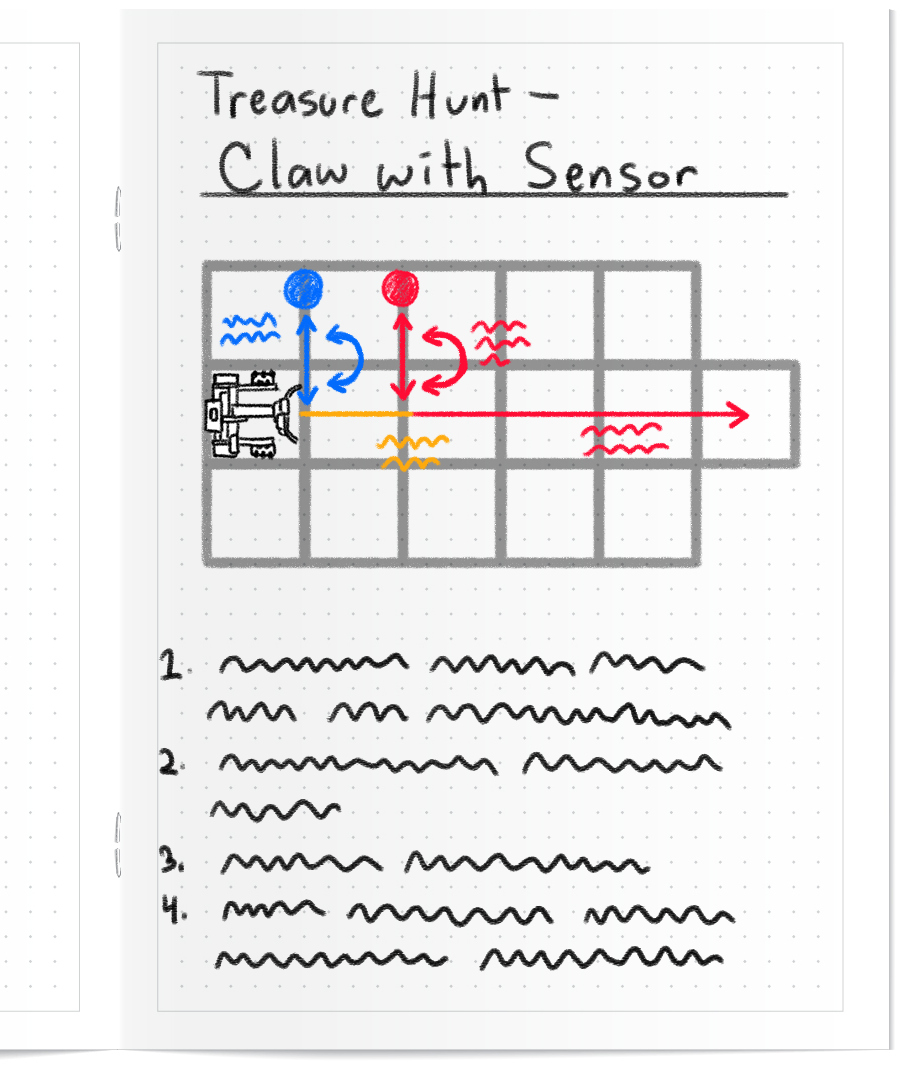
Bij deze activiteit rijdt je robot naar twee verschillende Buckyballs en gebruikt de optische sensor om de kleur van elke Buckyball te detecteren. Als de Buckyball rood is, moet je robot deze met de klauw pakken en naar de Home Zone verplaatsen.
Bekijk de onderstaande video om te zien hoe je wat je hebt geleerd, kunt toepassen om de Eye Spy Treasure-oefenactiviteit te voltooien.
Nu is het jouw beurt om de oefenactiviteit 'Eye Spy Treasure' te voltooien!
In deze animatie beweegt de robot autonoom om elke Buckyball te controleren met de optische sensor, maar pakt alleen de rode Buckyball op om deze naar de Home Zone te verplaatsen. Bekijk deze animatie om een mogelijk pad te zien dat je robot kan volgen om de oefenactiviteit 'Eye Spy Treasure' te voltooien.
Volg de stappen in dit document om deze activiteit te voltooien.
Terwijl u de Eye Spy Treasure-oefenactiviteit voltooit, noteert u uw bevindingen in uw technisch notitieboekje.
- Denk aan de afstanden die de robot moet afleggen om bij de verschillende Buckyballs te komen.
- Denk na over wat de robot moet doen als hij een rode Buckyball detecteert.
Bekijk deze afbeelding voor een voorbeeld van hoe u uw resultaten kunt vastleggen.
Bereid je voor op de Challenge-activiteit
In Compete (op de volgende pagina) programmeer je je robot om zelfstandig Buckyballs te controleren en alleen de rode Buckyball te verzamelen en naar de Home Zone te verplaatsen. Ontdek hoe je mee kunt doen aan de Treasure Mover Challenge, test je begrip en oefen vervolgens voor de uitdaging.
Het doel van deze uitdaging is om je robot autonoom te laten rijden om de Buckyballs op het veld te controleren en de rode Buckyball zo snel mogelijk te verzamelen en naar de Home Zone te verplaatsen.
Bekijk deze animatie om een voorbeeld te zien van hoe jouw robot zich kan bewegen tijdens een succesvolle uitvoering van de uitdaging.
Dit is slechts één van de mogelijke routes die uw robot kan volgen om de Treasure Mover Challenge te voltooien.
Volg de stappen in dit document voor meer informatie over het voltooien van deze activiteit. Google / .docx / .pdf
Controleer uw begrip
Voordat u aan de uitdaging begint, moet u ervoor zorgen dat u de regels begrijpt en dat u zich goed voorbereidt door de vragen in het onderstaande document in uw technische notitieboekje te beantwoorden.
Controleer uw begrip vragen Google / .docx / .pdf
Nadat u de vragen hebt beantwoord, kunt u oefenen voor de uitdaging.
Selecteer Volgende > om deel te nemen aan de Treasure Mover Challenge.