
Prática
Na última seção, você aprendeu como o Sensor Óptico funciona e como pode usar os dados desse sensor no seu código para que o seu robô conclua uma tarefa, como encontrar cores específicas de Buckyballs. Você também aprendeu como blocos de controle como [If then] e [Repeat] podem ser usados para que seu robô tome decisões. Agora, você vai aplicar o que aprendeu para codificar o seu Clawbot com um Sensor Óptico para concluir a atividade Tesouro de Espiões Oculares.
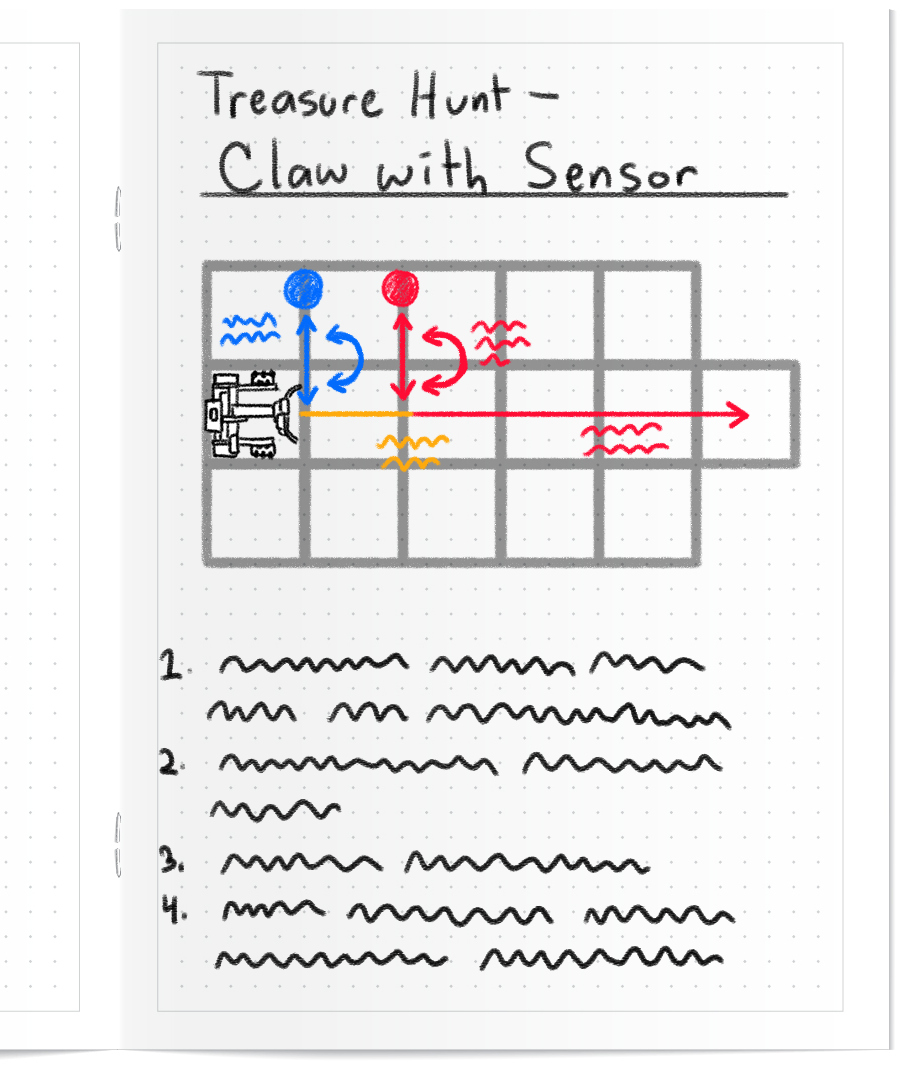
Nesta atividade, o seu robô conduzirá até dois Buckyballs diferentes e utilizará o Sensor Óptico para detetar a cor de cada um. Se o Buckyball estiver vermelho, seu robô deve recolhê-lo com a garra e movê-lo para a Zona Inicial.
Assista ao vídeo abaixo para ver como você pode aplicar o que aprendeu para concluir a atividade de prática do Tesouro de Espiões Oculares.
Agora é a sua vez de concluir a atividade de prática do Tesouro Espião dos Olhos!
Nesta animação, o robô se move de forma autônoma para verificar cada Buckyball com o Sensor Óptico, mas apenas pega o Buckyball vermelho para movê-lo para a Zona Inicial. Assista a esta animação para ver um possível caminho que seu robô pode seguir para concluir a atividade de prática do Tesouro Espião dos Olhos.
Siga as etapas deste documento para concluir esta atividade.
Ao concluir a atividade de prática do Tesouro Espião de Olhos, documente suas descobertas no seu caderno de engenharia.
- Pense nas distâncias que o robô precisará percorrer para chegar a cada um dos Buckyballs.
- Pense no que o robô precisará fazer quando detectar uma Buckyball vermelha.
Veja esta imagem para obter um exemplo de como pode registar os seus resultados.
Prepare-se para a Atividade do Desafio
Em Competir (na próxima página), você codificará seu robô para verificar autonomamente Buckyballs e coletar e mover apenas o Buckyball vermelho para a Zona Inicial. Aprenda a competir no Treasure Mover Challenge, verifique sua compreensão e, em seguida, pratique o desafio.
O objetivo deste desafio é fazer com que seu robô dirija de forma autônoma para verificar as Buckyballs no Campo, coletar a Buckyball vermelha e movê-la para a Zona Inicial no tempo mais rápido.
Assista a esta animação para ver um exemplo de como seu robô pode se mover durante uma corrida bem-sucedida do desafio.
Este é apenas um caminho possível que seu robô pode seguir para concluir o Desafio do Movimentador de Tesouros.
Siga as etapas deste documento para saber mais sobre como concluir esta atividade. Google / .docx / .pdf
Verifique a sua compreensão
Antes de iniciar o desafio, certifique-se de entender as regras e configurar respondendo às perguntas no documento abaixo em seu caderno de engenharia.
Verifique as suas perguntas de compreensão Google / .docx / .pdf
Depois de concluir as perguntas, pratique para o desafio.
Selecione Next > para competir no Treasure Mover Challenge.