
Praxis
Im letzten Abschnitt haben Sie gelernt, wie der optische Sensor funktioniert und wie Sie Daten von diesem Sensor in Ihrem Code verwenden können, um Ihren Roboter dazu zu bringen, eine Aufgabe auszuführen, z. B. bestimmte Farben von Buckyballs zu finden. Sie haben auch gelernt , wie Kontrollblöcke wie [Wenn dann] und [Wiederholen] verwendet werden können, um Ihren Roboter Entscheidungen treffen zu lassen. Jetzt werden Sie das Gelernte anwenden, um Ihren Clawbot mit einem optischen Sensor zu kodieren, um die Aktivität Eye Spy Treasure abzuschließen.
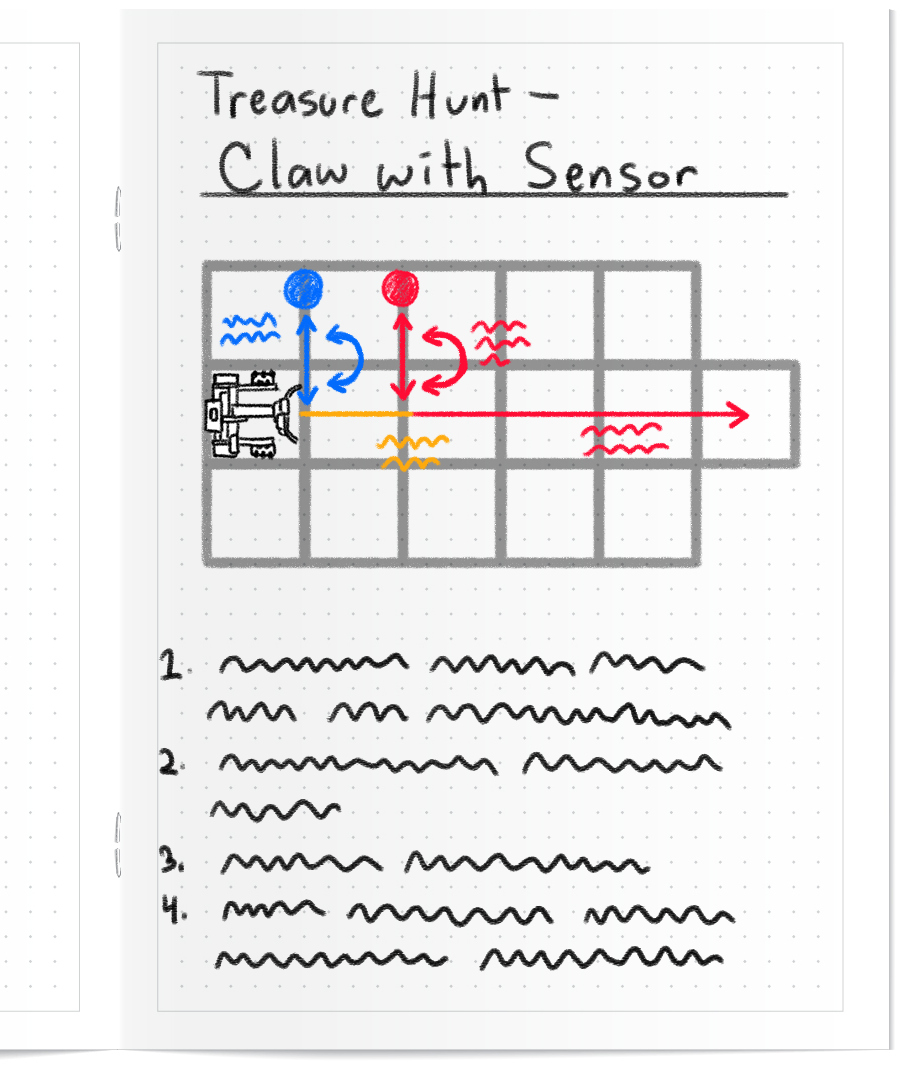
In dieser Aktivität fährt Ihr Roboter zu zwei verschiedenen Buckyballs und verwendet den optischen Sensor, um die Farbe jedes einzelnen zu erkennen. Wenn der Buckyball rot ist, sollte dein Roboter ihn mit der Klaue aufnehmen und in die Home Zone bringen.
Sehen Sie sich das Video unten an, um zu sehen, wie Sie das Gelernte anwenden können, um die Übungsaktivität Eye Spy Treasure abzuschließen.
Jetzt bist du an der Reihe, die Übungsaktivität "Augenspion-Schatz" abzuschließen!
In dieser Animation bewegt sich der Roboter autonom, um jeden Buckyball mit dem optischen Sensor zu überprüfen, nimmt aber nur den roten Buckyball auf, um ihn in die Home-Zone zu bewegen. Sehen Sie sich diese Animation an, um einen möglichen Weg zu sehen, den Ihr Roboter einschlagen könnte, um die Übungsaktivität Eye Spy Treasure abzuschließen.
Befolgen Sie die Schritte in diesem Dokument, um diese Aktivität abzuschließen.
Wenn Sie die Übung Eye Spy Treasure abgeschlossen haben, dokumentieren Sie Ihre Ergebnisse in Ihrem technischen Notizbuch.
- Denken Sie an die Entfernungen, die der Roboter zurücklegen muss, um zu jedem der Buckyballs zu fahren.
- Denken Sie darüber nach, was der Roboter tun muss, wenn er einen roten Buckyball erkennt.
Sehen Sie sich dieses Bild an, um ein Beispiel dafür zu erhalten, wie Sie Ihre Ergebnisse aufzeichnen können.
Bereiten Sie sich auf die Challenge-Aktivität vor
In Compete (auf der nächsten Seite) kodierst du deinen Roboter, um Buckyballs autonom zu überprüfen und nur den roten Buckyball zu sammeln und in die Home-Zone zu bewegen. Lerne, wie du an der Treasure Mover Challenge teilnimmst, überprüfe dein Verständnis und übe dann für die Herausforderung.
Das Ziel dieser Herausforderung ist es, Ihren Roboter autonom fahren zu lassen, um die Buckyballs auf dem Feld zu überprüfen und den roten Buckyball zu sammeln und ihn in der schnellsten Zeit in die Home Zone zu bringen.
Sehen Sie sich diese Animation an, um ein Beispiel dafür zu sehen, wie sich Ihr Roboter in einem erfolgreichen Lauf der Herausforderung bewegen könnte.
Dies ist nur ein möglicher Weg, den dein Roboter einschlagen könnte, um die Treasure Mover Challenge abzuschließen.
Befolgen Sie die Schritte in diesem Dokument, um mehr darüber zu erfahren, wie Sie diese Aktivität abschließen. Google / .docx / .pdf
Überprüfe dein Verständnis
Bevor Sie mit der Herausforderung beginnen, stellen Sie sicher, dass Sie die Regeln verstanden und eingerichtet haben, indem Sie die Fragen im folgenden Dokument in Ihrem technischen Notizbuch beantworten.
Überprüfen Sie Ihr Verständnis Fragen Google / .docx / .pdf
Üben Sie nach Abschluss der Fragen für die Herausforderung.
Wähle Weiter aus > , um an der Treasure Mover Challenge teilzunehmen.