
Pratique
Dans la dernière section, vous avez appris comment fonctionne le capteur optique et comment vous pouvez utiliser les données de ce capteur dans votre code pour que votre robot effectue une tâche, telle que la recherche de couleurs spécifiques de Buckyballs. Vous avez également appris comment les blocs de contrôle comme [If then] et [Repeat] peuvent être utilisés pour que votre robot prenne des décisions. Maintenant, vous allez appliquer ce que vous avez appris pour coder votre Clawbot avec un capteur optique pour compléter l'activité Eye Spy Treasure.
Dans cette activité, votre robot se dirigera vers deux Buckyballs différents et utilisera le capteur optique pour détecter la couleur de chacun. Si le Buckyball est rouge, votre robot doit le récupérer avec la griffe et le déplacer vers la zone d'origine.
Regardez la vidéo ci-dessous pour voir comment vous pouvez appliquer ce que vous avez appris pour terminer l'activité de pratique Eye Spy Treasure.
Maintenant, c'est à votre tour de terminer l'activité de pratique Eye Spy Treasure !
Dans cette animation, le robot se déplace de manière autonome pour vérifier chaque Buckyball avec le capteur optique, mais ne prend que le Buckyball rouge pour le déplacer vers la zone d'origine. Regardez cette animation pour voir un chemin possible que votre robot pourrait prendre pour terminer l'activité de pratique Eye Spy Treasure.
Suivez les étapes de ce document pour terminer cette activité.
Au fur et à mesure que vous terminez l'activité de pratique Eye Spy Treasure, documentez vos conclusions dans votre cahier d'ingénierie.
- Pensez aux distances que le robot devra parcourir pour se rendre à chacune des Buckyballs.
- Pensez à ce que le robot devra faire lorsqu'il détectera une boule de Bucky rouge.
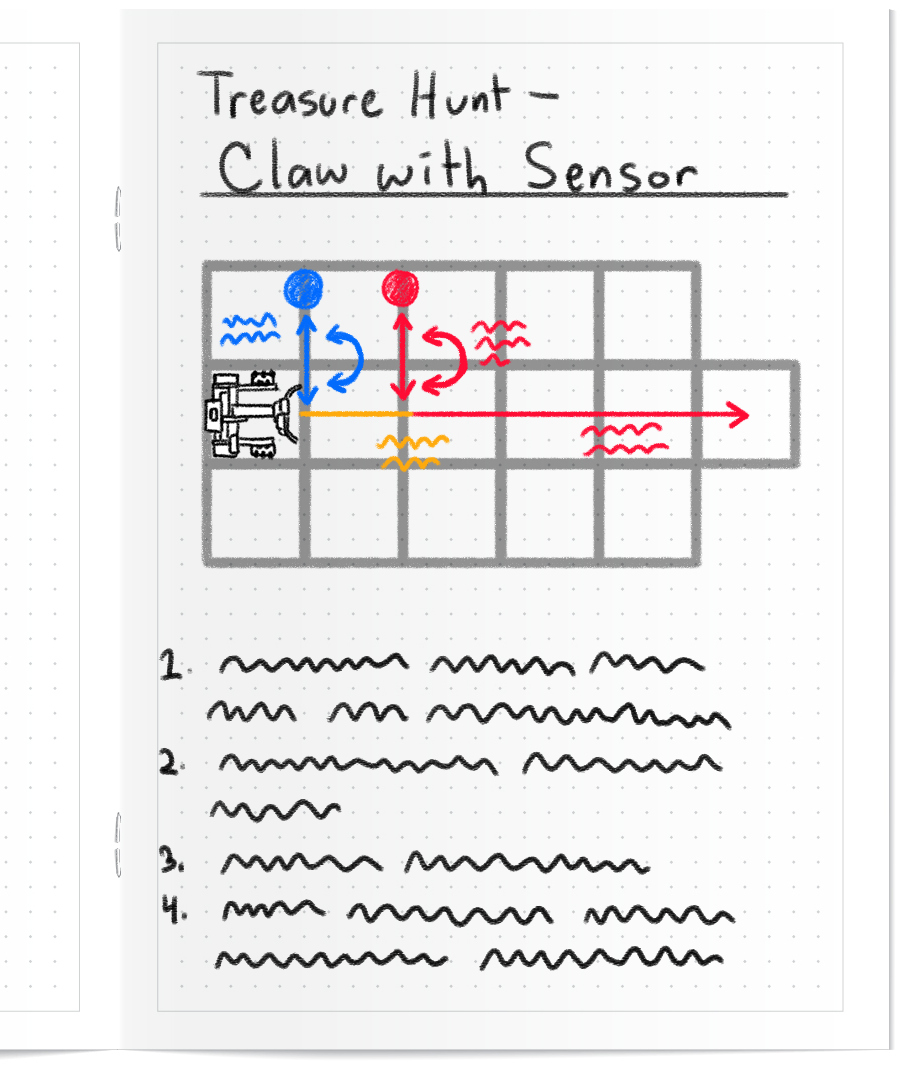
Affichez cette image pour un exemple de la façon dont vous pouvez enregistrer vos résultats.
Préparez-vous pour l'activité du défi
Dans Compétition (à la page suivante), vous allez coder votre robot pour vérifier de manière autonome les Buckyballs et collecter et déplacer uniquement le Buckyball rouge dans la zone d'accueil. Apprenez à participer au Treasure Mover Challenge, vérifiez votre compréhension, puis entraînez-vous pour relever le défi.
Le but de ce défi est de faire en sorte que votre robot conduise de manière autonome pour vérifier les Buckyballs sur le terrain, collecter le Buckyball rouge et le déplacer vers la zone d'origine dans le temps le plus rapide.
Regardez cette animation pour voir un exemple de la façon dont votre robot pourrait se déplacer dans une course réussie du défi.
Il ne s'agit que d'un chemin possible que votre robot pourrait emprunter pour terminer le défi du Déménageur de trésors.
Suivez les étapes de ce document pour en savoir plus sur la façon de réaliser cette activité. Google / .docx / .pdf
Vérifiez votre compréhension
Avant de commencer le défi, assurez-vous de comprendre les règles et la configuration en répondant aux questions du document ci-dessous dans votre cahier d'ingénierie.
Vérifiez votre compréhension des questions Google / .docx / .pdf
Après avoir répondu aux questions, entraînez-vous à relever le défi.
Sélectionnez Suivant > pour participer au Treasure Mover Challenge.