
കൺട്രോളർ: ടാങ്ക് ഡ്രൈവ് എക്സ്പ്ലോറേഷൻ - പൈത്തൺ
![]() അധ്യാപക ഉപകരണപ്പെട്ടി
-
ഈ വിഭാഗത്തിന്റെ ഉദ്ദേശ്യം
അധ്യാപക ഉപകരണപ്പെട്ടി
-
ഈ വിഭാഗത്തിന്റെ ഉദ്ദേശ്യം
ടാങ്ക് കൺട്രോൾ ഉദാഹരണ പ്രോജക്റ്റ് ഉപയോഗിക്കുന്നത്, കൺട്രോളർ ഉപയോഗിച്ച് ക്ലോബോട്ടിനെ നിയന്ത്രിക്കാൻ വിദ്യാർത്ഥികളെ പ്രാപ്തരാക്കുന്നു. Clawbot ഓരോ മോട്ടോറുകളുടെയും വേഗത നിയന്ത്രിക്കുന്നതിനും മോട്ടോർ പ്രവർത്തനങ്ങൾ നിയന്ത്രിക്കാൻ കൺട്രോളറെ പ്രാപ്തമാക്കുന്നതിനും left_motor.set_velocity(), right_motor.set_velocity(), left_motor.spin(), right_motor.spin(), left_motor_speed = controller_1.axis3.position(), right_motor_speed = controller_1.axis2.position()നിർദ്ദേശങ്ങളിലെ പാരാമീറ്ററുകൾ വിദ്യാർത്ഥികൾ ക്രമീകരിക്കേണ്ടതുണ്ട്.
ഏതെങ്കിലും നിർദ്ദേശങ്ങളെക്കുറിച്ചുള്ള കൂടുതൽ വിവരങ്ങൾക്ക്, VEXcode V5 ലെ പൈത്തൺസഹായ വിഭാഗം സന്ദർശിക്കുക.
ഈ പ്രവർത്തനത്തിൽ വിദ്യാർത്ഥികൾ എന്തുചെയ്യുമെന്നതിന്റെ ഒരു രൂപരേഖ താഴെ കൊടുക്കുന്നു:
- ടാങ്ക് കൺട്രോൾ ഉദാഹരണ പ്രോജക്റ്റ് പര്യവേക്ഷണം ചെയ്യുക.
- ഉം True അനന്തമായ ലൂപ്പ്ഘടനയുടെ ഉപയോഗം മനസ്സിലാക്കുക.
- റോബോ-സ്ലാലോം വെല്ലുവിളി പൂർത്തിയാക്കൂ!
![]() അധ്യാപക നുറുങ്ങുകൾ
അധ്യാപക നുറുങ്ങുകൾ
വിദ്യാർത്ഥി ആദ്യമായി VEXcode V5 ഉപയോഗിക്കുകയാണെങ്കിൽ, അവർക്ക് VEX ലൈബ്രറിയിലെ നിരവധി സഹായകരമായലേഖനങ്ങൾആക്സസ് ചെയ്യാൻ കഴിയും.
| അളവ് | ആവശ്യമായ വസ്തുക്കൾ |
|---|---|
| 1 |
VEX V5 ക്ലാസ്റൂം സ്റ്റാർട്ടർ കിറ്റ് (കാലികമായ ഫേംവെയറോടുകൂടി) |
| 1 |
VEXcode V5 (ഏറ്റവും പുതിയ പതിപ്പ്, വിൻഡോസ്, macOS) |
| 1 |
എഞ്ചിനീയറിംഗ് നോട്ട്ബുക്ക് |
| 1 |
ടാങ്ക് നിയന്ത്രണ പദ്ധതി ഉദാഹരണം |
| രണ്ടോ അതിലധികമോ |
തടസ്സങ്ങളായി ഉപയോഗിക്കേണ്ട ക്ലാസ് മുറിയിലെ വസ്തുക്കൾ |
![]() അധ്യാപക നുറുങ്ങുകൾ
-
ഓട്ടോകംപ്ലീറ്റ് ഉപയോഗിക്കൽ
അധ്യാപക നുറുങ്ങുകൾ
-
ഓട്ടോകംപ്ലീറ്റ് ഉപയോഗിക്കൽ
നിങ്ങൾ ടൈപ്പ് ചെയ്യുന്ന കമാൻഡിന്റെ ബാക്കി ഭാഗങ്ങൾ പ്രവചിക്കുന്ന VEXcode V5 ലെ ഒരു സവിശേഷതയാണ് ഓട്ടോകംപ്ലീറ്റ്. വിദ്യാർത്ഥികൾ VEXcode V5-ൽ പ്രവർത്തിക്കുന്നതിനാൽ, പൈത്തൺ വാക്യഘടനയിൽ സഹായിക്കുന്നതിന് ഓട്ടോകംപ്ലീറ്റ് സവിശേഷത ഉപയോഗിക്കാൻ അവരെ പ്രോത്സാഹിപ്പിക്കുക. നിങ്ങൾ നിർദ്ദേശം ടൈപ്പ് ചെയ്യാൻ തുടങ്ങുമ്പോൾ ഒരു ഓട്ടോകംപ്ലീറ്റ് ഫംഗ്ഷൻ നിങ്ങൾ ശ്രദ്ധിച്ചേക്കാം. നിങ്ങൾക്ക് ആവശ്യമുള്ള പേര് തിരഞ്ഞെടുക്കാൻ നിങ്ങളുടെ “Up” ഉം “Down” ഉം കീകൾ ഉപയോഗിക്കുക, തുടർന്ന് തിരഞ്ഞെടുക്കാൻ നിങ്ങളുടെ കീബോർഡിൽ “Tab” അല്ലെങ്കിൽ (Enter/Return) അമർത്തുക. ഈ സവിശേഷതയെക്കുറിച്ചുള്ള കൂടുതൽ വിവരങ്ങൾക്ക് പൈത്തൺ ലേഖനംപരിശോധിക്കുക.

ഈ പ്രവർത്തനം നിങ്ങളുടെ കൺട്രോളർ പ്രോഗ്രാം ചെയ്യുന്നതിനുള്ള ഉപകരണങ്ങൾ നൽകും.
- ഈ പര്യവേഷണത്തിൽ ഉപയോഗിക്കുന്ന VEXcode V5 പൈത്തൺ നിർദ്ദേശങ്ങൾ:
- ഇടത്_മോട്ടോർ.സെറ്റ്_വെലോസിറ്റി()
- വലത്_മോട്ടോർ.സെറ്റ്_വെലോസിറ്റി()
- ഇടത്_മോട്ടോർ.സ്പിൻ()
- വലത്_മോട്ടോർ.സ്പിൻ()
- കൺട്രോളർ_1.ആക്സിസ്2.പൊസിഷൻ()
- കൺട്രോളർ_1.axis3.position()
- ശരിയാണെങ്കിലും:
- കാത്തിരിക്കുക(5, സെക്കൻഡ്)
ഏതെങ്കിലും നിർദ്ദേശങ്ങളെക്കുറിച്ചുള്ള കൂടുതൽ വിവരങ്ങൾക്ക്, VEXcode V5 ലെ പൈത്തൺ സഹായ വിഭാഗങ്ങൾ സന്ദർശിക്കുക.
ഘട്ടം 1: നമുക്ക് കൺട്രോളർ പ്രോഗ്രാം ചെയ്യാൻ തുടങ്ങാം.
- ഫയൽ, ഓപ്പൺ ഉദാഹരണങ്ങൾ തിരഞ്ഞെടുക്കുക.

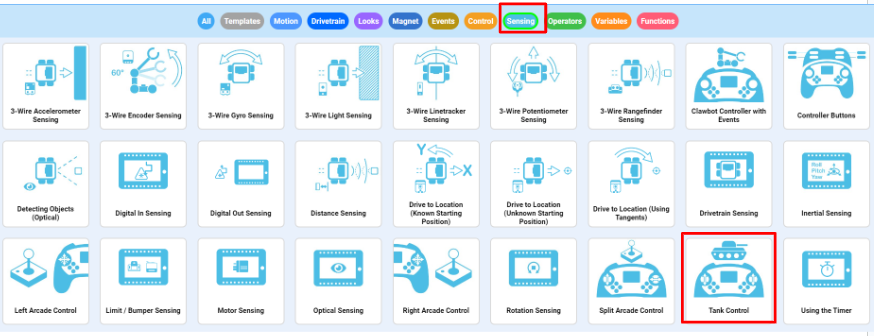
- വ്യത്യസ്ത ഉദാഹരണം പ്രോജക്റ്റുകളിലൂടെ സ്ക്രോൾ ചെയ്യുക. ടാങ്ക് കൺട്രോൾ ഉദാഹരണ പ്രോജക്റ്റ് തിരഞ്ഞെടുക്കുക.
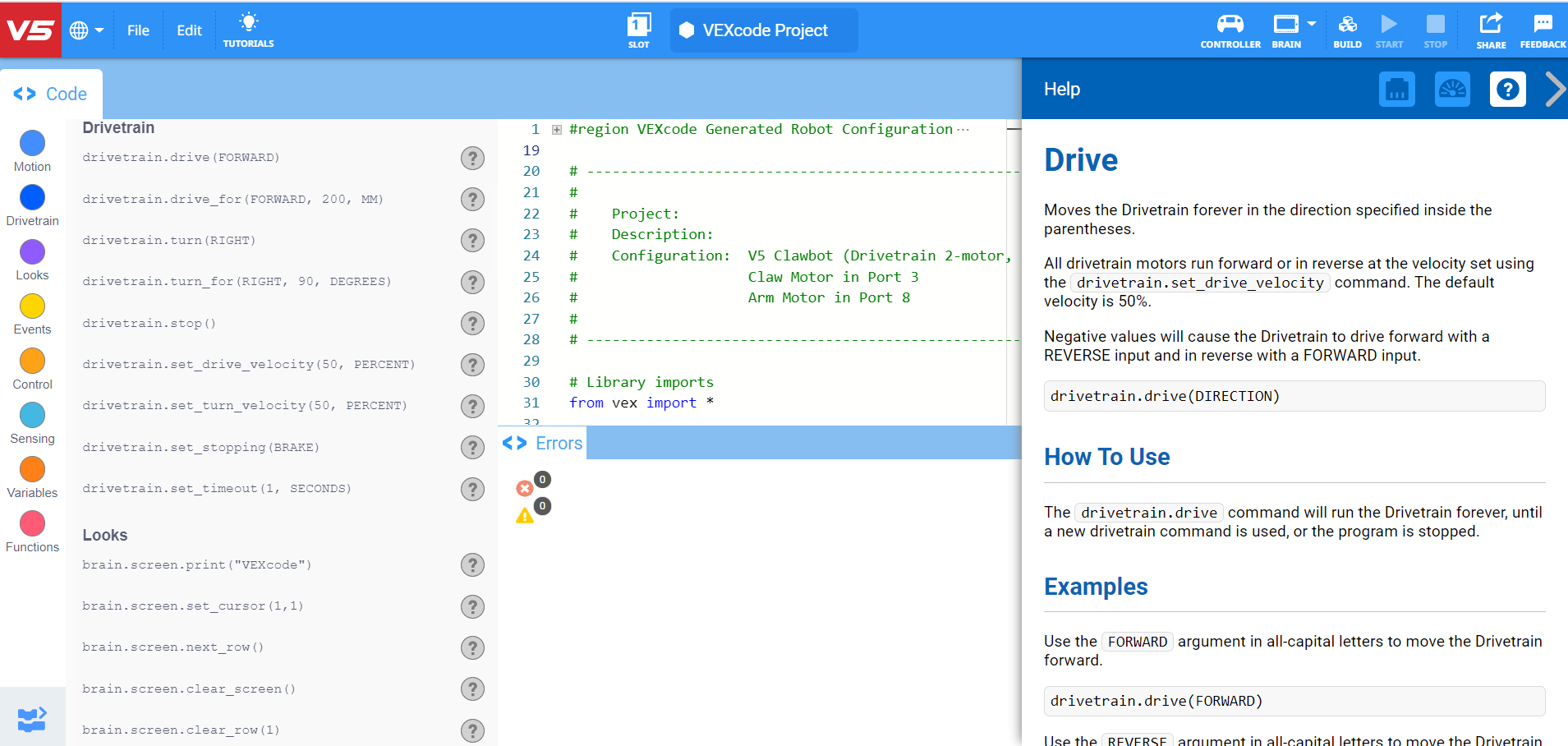
- ടാങ്ക് കൺട്രോൾ ഉദാഹരണ പ്രോജക്റ്റ് തുറക്കുക. ഉദാഹരണ പ്രോജക്റ്റ് ഡ്രൈവ്ട്രെയിനും കൺട്രോളറും കോൺഫിഗർ ചെയ്യുന്നു. കോഡ് ഇനിപ്പറയുന്ന സ്നിപ്പെറ്റ് പോലെ കാണപ്പെടും:
# ലൈബ്രറി vex import ൽ നിന്ന്
ഇംപോർട്ട് ചെയ്യുന്നു *
# പ്രോജക്റ്റ് കോഡ്
ആരംഭിക്കുക # കൺട്രോളർ ആക്സിസ് പോസ്റ്റിയോൺസ്
ആയി മോട്ടോറുകൾ സജ്ജീകരിക്കുന്നതിനുള്ള മെയിൻ കൺട്രോളർ ലൂപ്പ്, True:
left_motor.set_velocity(controller_1.axis3.position(), PERCENT)
right_motor.set_velocity(controller_1.axis2.position(), PERCENT)
left_motor.spin(FORWARD)
right_motor.spin(FORWARD)
wait(5, MSEC)നിങ്ങളുടെ എഞ്ചിനീയറിംഗ് നോട്ട്ബുക്കിൽ ഇനിപ്പറയുന്നവ ചെയ്യുക:
- ക്ലോബോട്ട് എന്ത് ചെയ്യുമെന്ന് പ്രോജക്റ്റ് പ്രവചിക്കുക. പ്രോജക്റ്റ് കൺട്രോളറെ ഉപയോഗിക്കുന്നു എന്നതിനേക്കാൾ കൂടുതൽ വിശദീകരിക്കുക.
- ജോയിസ്റ്റിക്കുകൾ എങ്ങനെയാണ് റോബോട്ടിനെ ചലിപ്പിക്കുന്നത്? ക്ലോബോട്ട് എന്താണ് ചെയ്യുന്നത്?
![]() ടീച്ചർ ടൂൾബോക്സ്
-
ഉത്തരങ്ങൾ
ടീച്ചർ ടൂൾബോക്സ്
-
ഉത്തരങ്ങൾ
- ഇടത്, വലത് ജോയ്സ്റ്റിക്കിന്റെ സ്ഥാനങ്ങൾ എവിടെയാണെന്ന് തുടർച്ചയായി പരിശോധിക്കുന്നതിന് ഈ പ്രോജക്റ്റ് ട്രൂ ഇൻഫിനിറ്റ് ലൂപ്പ് ഘടന ഉപയോഗിക്കും. ഇടത് (അല്ലെങ്കിൽ വലത്) ജോയ്സ്റ്റിക്ക് മുകളിലേക്ക് തള്ളുമ്പോൾ, ജോയ്സ്റ്റിക്ക് എത്ര ദൂരം മുന്നോട്ട് തള്ളപ്പെടുന്നു എന്നതിന് ആനുപാതികമായി വേഗത സജ്ജീകരിച്ചിരിക്കുന്നു.
- അങ്ങനെ, ജോയ്സ്റ്റിക്ക് കൂടുതൽ മുന്നോട്ട് തള്ളുമ്പോൾ, വേഗത വേഗത്തിൽ സജ്ജമാക്കപ്പെടുകയും മോട്ടോറുകൾ വേഗത്തിൽ ചലിക്കുകയും ചെയ്യും. ജോയ്സ്റ്റിക്ക് പിന്നിലേക്ക് തള്ളുന്നതിനും ഇതേ ആശയം തന്നെയാണ് ഉപയോഗിക്കുന്നത്. ജോയ്സ്റ്റിക്ക് എത്ര പിന്നിലേക്ക് തള്ളപ്പെടുന്നുവോ അത്രയും വേഗത്തിൽ മോട്ടോറുകൾ പിന്നിലേക്ക് നീങ്ങും.
- പ്രോജക്റ്റിന് എന്ന് പേര് നൽകുക ടാങ്ക് കൺട്രോൾ. പൈത്തൺ ടാങ്ക് കൺട്രോൾ പ്രോജക്റ്റ് സേവ് ചെയ്യുക, ഡൗൺലോഡ് ചെയ്യുക, പ്രവർത്തിപ്പിക്കുക.

- കൂടുതൽ സഹായ വിവരങ്ങൾക്ക്, ഒരു പ്രോജക്റ്റ് എങ്ങനെ ഡൗൺലോഡ് ചെയ്ത് പ്രവർത്തിപ്പിക്കാമെന്ന് വിശദീകരിക്കുന്ന VEXcode V5-ലെ ട്യൂട്ടോറിയൽ വീഡിയോ കാണുക.

- നിങ്ങളുടെ എഞ്ചിനീയറിംഗ് നോട്ട്ബുക്കിൽ പ്രോജക്റ്റിനെക്കുറിച്ചുള്ള വിശദീകരണങ്ങൾ പരിശോധിച്ച് ആവശ്യാനുസരണം അവ ശരിയാക്കാൻ കുറിപ്പുകൾ ചേർക്കുക.
ഘട്ടം 2: കൺട്രോളർ: ടാങ്ക് നിയന്ത്രണം
![]() ടീച്ചർ ടൂൾബോക്സ്
-
ട്രൂ ഇൻഫിനിറ്റ് ലൂപ്പ് ഘടനകൾ
ടീച്ചർ ടൂൾബോക്സ്
-
ട്രൂ ഇൻഫിനിറ്റ് ലൂപ്പ് ഘടനകൾ
ഈ ഘട്ടം while True infinite loop ഘടനയുടെ പ്രാധാന്യത്തെക്കുറിച്ച് ചർച്ച ചെയ്യുന്നു. നിങ്ങൾ വിവരങ്ങൾ ഒരു ക്ലാസായി അവലോകനം ചെയ്യണം. നിങ്ങളുടെ Clawbot ഉം Controller ഉം ഉപയോഗിച്ച് നിങ്ങൾക്ക് പെരുമാറ്റം മാതൃകയാക്കാം, അല്ലെങ്കിൽ സമയം അനുവദിക്കുകയാണെങ്കിൽ, ഉം True infinite loop ഘടനയും ഇല്ലാതെ പ്രോഗ്രാം പ്രവർത്തിപ്പിക്കാൻ വിദ്യാർത്ഥികളെക്കൊണ്ട് ആവശ്യപ്പെടുക.
ഉം True അനന്തമായ ലൂപ്പും മനസ്സിലാക്കാൻ വിദ്യാർത്ഥികൾക്ക് കൂടുതൽ സഹായം ആവശ്യമുണ്ടെങ്കിൽ, ഇവിടെ ക്ലിക്ക് ചെയ്യുക.
True ഇൻഫിനിറ്റ് ലൂപ്പ് ഘടന ഉപയോഗിക്കുമ്പോൾ ഉപയോഗിക്കുന്നതിന്റെ പ്രയോജനങ്ങൾ എന്തൊക്കെയാണ്?
ഉം True ഇൻഫിനിറ്റ് ലൂപ്പ് ഘടനയില്ലാത്ത ഞങ്ങളുടെ പ്രോജക്റ്റ് ഇതാ:
# ലൈബ്രറി vex import ൽ നിന്ന്
ഇംപോർട്ട് ചെയ്യുന്നു *
# പ്രോജക്റ്റ് കോഡ് ആരംഭിക്കുക
# കൺട്രോളർ ആക്സിസ് പോസ്റ്റിയോൺസിലേക്ക് മോട്ടോറുകൾ സജ്ജീകരിക്കുന്നതിനുള്ള മെയിൻ കൺട്രോളർ ലൂപ്പ്
left_motor.set_velocity(controller_1.axis3.position(), PERCENT)
right_motor.set_velocity(controller_1.axis2.position(), PERCENT)
left_motor.spin(FORWARD)
right_motor.spin(FORWARD)
ഈ പ്രോഗ്രാം പ്രവർത്തിപ്പിച്ചാൽ എന്ത് സംഭവിക്കുമെന്ന് നിങ്ങൾ കരുതുന്നു? ഒരു ഗ്രൂപ്പായി ചർച്ച ചെയ്യുക. നിങ്ങളുടെ പ്രവചനം എഞ്ചിനീയറിംഗ് നോട്ട്ബുക്കിൽ എഴുതുക.
![]() ടീച്ചർ ടൂൾബോക്സ്
-
ഘടന മനസ്സിലാക്കൽ
ടീച്ചർ ടൂൾബോക്സ്
-
ഘടന മനസ്സിലാക്കൽ
while True infinite loop ഇല്ലാതെ, ഓരോ മോട്ടോറിനുമുള്ള പ്രവേഗത്തിന്റെ മൂല്യം പ്രോജക്റ്റ് പ്രവർത്തിപ്പിച്ചയുടനെ സജ്ജമാക്കും, കൂടാതെ പ്രോജക്റ്റ് നിർത്തുന്നത് വരെ ആ മൂല്യം സ്ഥിരമായി തുടരും. മറ്റൊരു വിധത്തിൽ പറഞ്ഞാൽ, ജോയ്സ്റ്റിക്കിന്റെ അച്ചുതണ്ടിലെ സ്ഥിരസ്ഥിതി സ്ഥാനം 0 ആയതിനാൽ, ജോയ്സ്റ്റിക്ക് നീക്കാതെ നിങ്ങൾ പ്രോജക്റ്റ് പ്രവർത്തിപ്പിക്കുകയാണെങ്കിൽ, നിങ്ങൾ ജോയ്സ്റ്റിക്ക് നീക്കിയാലും രണ്ട് മോട്ടോറുകളുടെയും വേഗത 0 ആയി തുടരും.
അതുപോലെ, ഇടതു ജോയ്സ്റ്റിക്ക് അച്ചുതണ്ട് 3 ലൂടെ കഴിയുന്നത്ര മുകളിലേക്ക് നീക്കി അവിടെ പിടിക്കുക. മുകളിലുള്ള പ്രോജക്റ്റ് പ്രവർത്തിപ്പിക്കുകയാണെങ്കിൽ, ഇടത് മോട്ടോർ പൂർണ്ണ വേഗതയിൽ ചലിക്കുകയും ജോയ്സ്റ്റിക്ക് അച്ചുതണ്ട് 3 ലൂടെ താഴേക്ക് നീക്കിയാലും ആ വേഗതയിൽ തന്നെ തുടരുകയും ചെയ്യും. കാരണം, പ്രോജക്റ്റ് പ്രവർത്തിപ്പിച്ചയുടൻ തന്നെ ക്ലോബോട്ടിന് കൺട്രോളറിൽ നിന്ന് പ്രാരംഭ നിർദ്ദേശം ലഭിക്കുന്നു; എന്നിരുന്നാലും, ഒരു ലൂപ്പ് ഇല്ലാതെ, ആ പ്രാരംഭ മൂല്യം അപ്ഡേറ്റ് ചെയ്യാൻ കഴിയില്ല.
ഉം True ഇൻഫിനിറ്റ് ലൂപ്പ്, ക്ലോബോട്ടിനോട് പ്രവേഗം നിരന്തരം അപ്ഡേറ്റ് ചെയ്യാനും പ്രോജക്റ്റിന്റെ ദൈർഘ്യം മുഴുവൻ പ്രവർത്തിപ്പിക്കാനും പറയുന്നു. മറ്റൊരു വിധത്തിൽ പറഞ്ഞാൽ, ഈ പ്രോജക്റ്റിലെ while True ഇൻഫിനിറ്റ് ലൂപ്പ്, ജോയ്സ്റ്റിക്ക് അച്ചുതണ്ട് 2 അല്ലെങ്കിൽ 3 വഴി ചലിപ്പിച്ചുകൊണ്ട് ഓരോ മോട്ടോറിന്റെയും വേഗത മാറ്റാൻ നിങ്ങളെ പ്രാപ്തമാക്കുന്നു, നിങ്ങൾ പ്രോജക്റ്റ് നിർത്തുകയോ ക്ലോബോട്ട് ഓഫ് ചെയ്യുകയോ ചെയ്യുന്നതുവരെ ക്ലോബോട്ട് അതിനനുസരിച്ച് പ്രതികരിക്കും.
# ലൈബ്രറി vex import ൽ നിന്ന്
ഇംപോർട്ട് ചെയ്യുന്നു *
# പ്രോജക്റ്റ് കോഡ്
ആരംഭിക്കുക # കൺട്രോളർ ആക്സിസ് പോസ്റ്റിയോൺസ്
ആയി മോട്ടോറുകൾ സജ്ജീകരിക്കുന്നതിനുള്ള മെയിൻ കൺട്രോളർ ലൂപ്പ്, True:
left_motor.set_velocity(controller_1.axis3.position(), PERCENT)
right_motor.set_velocity(controller_1.axis2.position(), PERCENT)
left_motor.spin(FORWARD)
right_motor.spin(FORWARD)
wait(5, MSEC)ഒരു സ്ലാലോം കോഴ്സ് നാവിഗേറ്റ് ചെയ്യൂ!
![]() ടീച്ചർ ടൂൾബോക്സ്
-
പ്രവർത്തനം സജ്ജമാക്കുക
ടീച്ചർ ടൂൾബോക്സ്
-
പ്രവർത്തനം സജ്ജമാക്കുക
വിദ്യാർത്ഥികളെ 2 അല്ലെങ്കിൽ 4 വിദ്യാർത്ഥികളുടെ ചെറിയ ഗ്രൂപ്പുകളായി ക്രമീകരിക്കുക. ഒരു വിദ്യാർത്ഥിയെ ഡ്രൈവറായി നിയമിക്കണം - ക്ലോബോട്ടിനെ നിയന്ത്രിക്കാൻ കൺട്രോളർ ഉപയോഗിക്കുന്ന വ്യക്തി.
ഓരോ "ഫ്ലാഗിന്റെയും" പുറത്ത് ക്ലോബോട്ട് നീക്കാൻ കൺട്രോളർ ഉപയോഗിച്ച് വിദ്യാർത്ഥികളെ ഈ സ്ലാലോം പൂർത്തിയാക്കാൻ അനുവദിക്കുക. ക്ലോബോട്ടിന്റെ പാത അതിനെ ഏതെങ്കിലും പതാകയിൽ സ്പർശിക്കുന്നത് തടയുകയും ഫിനിഷിംഗ് ലൈൻ കടക്കാൻ അനുവദിക്കുകയും വേണം. നിങ്ങളുടെ കൈവശമുള്ള ഏത് ക്ലാസ് മുറിയിലെ മെറ്റീരിയലോ/വസ്തുവോ (ഇറേസർ, ടേപ്പ് റോൾ, ടിഷ്യു ബോക്സ്) പതാകകൾ ആകാം, കൂടാതെ ക്ലോബോട്ട് പ്രവർത്തിപ്പിക്കുന്നതിന് മുമ്പ് അവ സ്ഥാപിക്കാനും കഴിയും.
സമയം അനുവദിക്കുകയാണെങ്കിൽ, മറ്റുള്ളവർക്ക് ക്ലോബോട്ടിനെ നയിക്കാൻ അവസരം നൽകുന്നതിനായി വിദ്യാർത്ഥികളെ റോളുകൾ മാറ്റാൻ അനുവദിക്കുക. ഓരോ ഡ്രൈവർക്കും എത്ര വേഗത്തിൽ സ്ലാലോം മറികടക്കാൻ കഴിയുമെന്ന് കണ്ടുകൊണ്ട്, ഗ്രൂപ്പുകൾക്കുള്ളിലോ ഗ്രൂപ്പുകൾക്കിടയിലോ ഉള്ള ഒരു മത്സരമാക്കി മാറ്റാൻ പോലും നിങ്ങൾക്ക് കഴിയും.

നിശ്ചിത ഫ്ലാഗുകൾ അല്ലെങ്കിൽ മാർക്കറുകൾക്ക് ചുറ്റും പങ്കെടുക്കുന്നയാൾ സഞ്ചരിക്കേണ്ട കോഴ്സുകളാണ് സ്ലാലോമുകൾ. സ്കീ സ്ലാലോമുകൾ ഒരു ജനപ്രിയ ശൈത്യകാല കായിക വിനോദമാണ്, അവ വിന്റർ ഒളിമ്പിക്സിൽ ഉൾപ്പെടുത്തിയിട്ടുണ്ട്.
ഇപ്പോൾ കൺട്രോളർ ജോടിയാക്കുകയും പൈത്തൺ പ്രോജക്റ്റ് ഡൗൺലോഡ് ചെയ്യുകയും ചെയ്തതിനാൽ, കൺട്രോളർ ഉപയോഗിച്ച് നിങ്ങളുടെ ക്ലോബോട്ട് നീക്കാൻ നിങ്ങൾ തയ്യാറാണ്!
- നിങ്ങളുടെ സ്ലാലോമിൽ പതാകകളായി ഉപയോഗിക്കുന്ന നാല് ക്ലാസ് മുറി ഇനങ്ങൾ അധ്യാപകനിൽ നിന്ന് ശേഖരിക്കുക.
- സ്ലാലോം ഡയഗ്രം അനുസരിച്ച്, ഡ്രൈവർക്ക് ക്ലോബോട്ടിനെ ചുറ്റി സഞ്ചരിക്കാൻ കഴിയുന്ന തരത്തിൽ ഫ്ലാഗുകൾ സ്ഥാപിക്കാൻ സഹകരിക്കുക.
- ടാങ്ക് നിയന്ത്രണ ഉദാഹരണ പ്രോജക്റ്റ് ഡൗൺലോഡ് ചെയ്യുക. ഒരു പ്രോജക്റ്റ് എങ്ങനെ ഡൗൺലോഡ് ചെയ്യാം എന്നതിനെക്കുറിച്ച് എന്തെങ്കിലും ചോദ്യങ്ങളുണ്ടെങ്കിൽ, ഒരു പ്രോജക്റ്റ് ഡൗൺലോഡ് ചെയ്ത് പ്രവർത്തിപ്പിക്കുക എന്ന ട്യൂട്ടോറിയൽ പരിശോധിക്കുക.
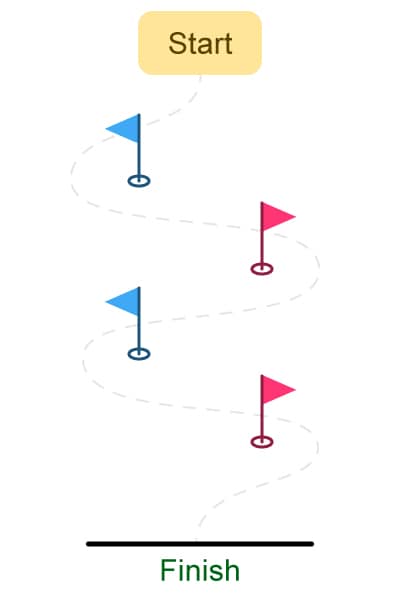
ഓരോ "ഫ്ലാഗിന്റെയും" പുറത്ത് നിങ്ങളുടെ ക്ലോബോട്ട് നീക്കാൻ കൺട്രോളർ ഉപയോഗിക്കുക. റോബോട്ടിന്റെ പാത ഏതെങ്കിലും പതാകയിൽ സ്പർശിക്കുന്നത് തടയുകയും ഫിനിഷിംഗ് ലൈൻ കടക്കാൻ അനുവദിക്കുകയും വേണം.
- പ്രോജക്റ്റ് പ്രവർത്തിപ്പിച്ച് ക്ലോബോട്ട് മുന്നോട്ടും പിന്നോട്ടും ഓടിക്കുക, രണ്ട് ജോയ്സ്റ്റിക്കുകളും ഉപയോഗിച്ച് ഇടത്തോട്ടും വലത്തോട്ടും തിരിക്കുക.
- ക്ലോബോട്ട് കോഴ്സ് പൂർത്തിയാക്കാൻ എത്ര സമയമെടുക്കുമെന്ന് കാണിക്കുന്ന സമയം. എഞ്ചിനീയറിംഗ് നോട്ട്ബുക്കിൽ സമയം രേഖപ്പെടുത്തുക.
- സ്ലാലോം കോഴ്സിലൂടെ നിങ്ങൾക്ക് എത്ര വേഗത്തിൽ ക്ലോബോട്ടിൽ എത്താൻ കഴിയും?
![]() ചർച്ചയെ പ്രചോദിപ്പിക്കുക
-
പ്രവർത്തനത്തെക്കുറിച്ച് ചിന്തിക്കുക
ചർച്ചയെ പ്രചോദിപ്പിക്കുക
-
പ്രവർത്തനത്തെക്കുറിച്ച് ചിന്തിക്കുക
ചോദ്യം: നിങ്ങൾ പ്രതീക്ഷിച്ചതുപോലെയാണോ ക്ലോബോട്ട് കൺട്രോളറിനോട് പ്രതികരിച്ചത്?
എ: ഉത്തരങ്ങൾ വ്യത്യസ്തമായിരിക്കും; എന്നിരുന്നാലും, ഈ ചോദ്യത്തിന്റെ ലക്ഷ്യം വൈജ്ഞാനിക ചിന്തയെ പ്രോത്സാഹിപ്പിക്കുക എന്നതാണ്. വിദ്യാർത്ഥികൾ പരീക്ഷിക്കുന്നതിനുമുമ്പ് പെരുമാറ്റരീതികൾ പ്രവചിച്ചും, അവരുടെ ഫലങ്ങൾ രേഖപ്പെടുത്തിയും, പ്രതിഫലിപ്പിച്ചും തുടങ്ങി.
ചോദ്യം: ക്ലോബോട്ട് ഒരു നേർരേഖയിൽ മുന്നോട്ട് അല്ലെങ്കിൽ പിന്നോട്ട് നീക്കുന്നതിലെ ഏറ്റവും വലിയ വെല്ലുവിളി എന്താണ്?
എ: ഉത്തരങ്ങൾ വ്യത്യസ്തമായിരിക്കാം, എന്നാൽ ക്ലോബോട്ടിന്റെ മോട്ടോറുകൾ ഒരേ ദിശയിലും ഒരേ വേഗതയിലും ചലിക്കുന്നുണ്ടെന്ന് ഉറപ്പാക്കാൻ രണ്ട് ജോയ്സ്റ്റിക്കുകളും പരസ്പരം സമന്വയിപ്പിച്ച് ചലിക്കണം എന്നതായിരിക്കണം പൊതുവായ പ്രതികരണം.
ചോദ്യം: ഉം True അനന്തമായ ലൂപ്പ് ലൂപ്പും ഉപയോഗിക്കുന്നത് എങ്ങനെയാണ് ക്ലോബോട്ട് നീക്കുന്നതിന് കൺട്രോളർ തുടർച്ചയായി ഉപയോഗിക്കാൻ നിങ്ങളെ പ്രാപ്തമാക്കുന്നത്?
എ: while True infinite loop ഇല്ലാതെ, പ്രോജക്റ്റിലെ നിർദ്ദേശങ്ങൾ അനുസരിച്ച് Clawbot ഒരിക്കൽ മാത്രമേ പെരുമാറ്റങ്ങൾ നടത്തുകയുള്ളൂ. ഉം True ഇൻഫിനിറ്റ് ലൂപ്പ്, ക്ലോബോട്ടിനോട് പ്രവേഗം നിരന്തരം അപ്ഡേറ്റ് ചെയ്യാനും പ്രോജക്റ്റിന്റെ ദൈർഘ്യം മുഴുവൻ പ്രവർത്തിപ്പിക്കാനും പറയുന്നു. മറ്റൊരു വിധത്തിൽ പറഞ്ഞാൽ, while True infinite loop, Clawbot അനിശ്ചിതമായി അല്ലെങ്കിൽ ബാറ്ററി തീരുന്നത് വരെ കൺട്രോളർ ഉപയോഗിച്ച് നീക്കാൻ നിങ്ങളെ പ്രാപ്തമാക്കുന്നു.