
പ്രോഗ്രാമിംഗ് ലൂപ്പുകൾ - പൈത്തൺ
![]() ടീച്ചർ ടൂൾബോക്സ്
-
പ്രവർത്തന രൂപരേഖ
ടീച്ചർ ടൂൾബോക്സ്
-
പ്രവർത്തന രൂപരേഖ
-
ഈ പര്യവേഷണം, ആവർത്തിച്ചുള്ള അല്ലെങ്കിൽ എന്നെന്നേക്കുമായി നിലനിൽക്കുന്ന ലൂപ്പുകൾ ഉപയോഗിച്ച് ആവർത്തന സ്വഭാവങ്ങൾ പ്രോഗ്രാമിംഗ് ചെയ്യുന്നതിന് വിദ്യാർത്ഥികളെ പരിചയപ്പെടുത്തും.
-
ആവർത്തിച്ചുള്ള പ്രവർത്തനങ്ങൾ ഉപയോഗിക്കുന്ന ഒരു പ്രോജക്റ്റ് നിർമ്മിക്കുമ്പോൾ, റിപ്പീറ്റ്, ഫോറെവർ ലൂപ്പുകൾ ഉപയോഗിച്ച് പ്രോഗ്രാം ചെയ്യാൻ പഠിക്കുന്നത് വിദ്യാർത്ഥികൾക്ക് സമയം ലാഭിക്കാൻ അനുവദിക്കുന്നു. ഒരു ടെക്സ്റ്റ് പ്രോജക്റ്റിൽ ഉപയോഗിക്കുന്ന നിർദ്ദേശങ്ങളെക്കുറിച്ചുള്ള കൂടുതൽ വിവരങ്ങൾക്ക്,സഹായവിവരങ്ങൾ സന്ദർശിക്കുക.
ക്ലോബോട്ട് V5 നീങ്ങാൻ തയ്യാറാണ്!
ലൂപ്പുകൾ ഉപയോഗിക്കുന്ന ചില രസകരമായ പ്രോജക്റ്റുകൾ സൃഷ്ടിക്കാൻ തുടങ്ങുന്നതിനുള്ള ഉപകരണങ്ങൾ ഈ പര്യവേക്ഷണം നിങ്ങൾക്ക് നൽകും.
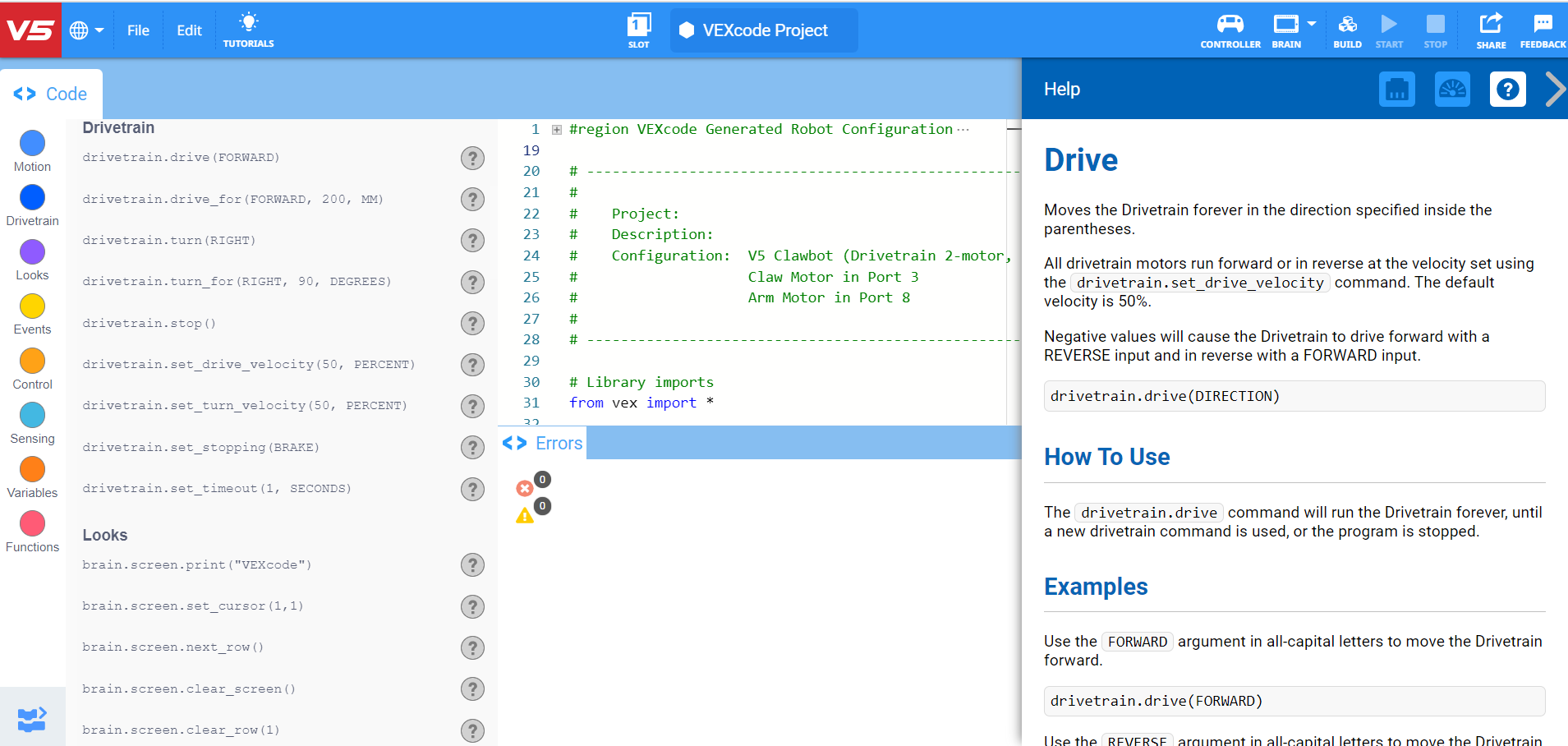
- ഈ പര്യവേഷണത്തിൽ ഉപയോഗിക്കുന്ന VEXcode V5 പൈത്തൺ നിർദ്ദേശങ്ങൾ:
- ഡ്രൈവ്ട്രെയിൻ.ഡ്രൈവ്_ഫോർ(ഫോർവേഡ്, 300, എംഎം)
- ഡ്രൈവ്ട്രെയിൻ.ടേൺ_ഫോർ(വലത്, 90, ഡിഗ്രി)
- claw_motor.spin_for(റിവേഴ്സ്, 70, ഡിഗ്രി)
- arm_motor.spin_for(മുന്നോട്ട്, 360, ഡിഗ്രി)
- ബമ്പർ_ബി.പ്രസ്സിംഗ്()
- ശരിയാണെങ്കിലും:
- ശ്രേണി(4) ലെ ആവർത്തന എണ്ണത്തിന്:
- കാത്തിരിക്കുക(5, സെക്കൻഡ്)
വ്യക്തിഗതപൈത്തൺകമാൻഡുകളെക്കുറിച്ച് അറിയാൻ നിങ്ങൾക്ക് VEXcode V5-ലെ സഹായ വിവരങ്ങൾ ഉപയോഗിക്കാം.
![]() അധ്യാപക നുറുങ്ങുകൾ
അധ്യാപക നുറുങ്ങുകൾ
വിദ്യാർത്ഥി ആദ്യമായി VEXcode V5 ഉപയോഗിക്കുകയാണെങ്കിൽ, അവർക്ക്VEX ലൈബ്രറിയിലെ വിവിധ ലേഖനങ്ങൾ വായിക്കാൻ കഴിയും.

![]() അധ്യാപക നുറുങ്ങുകൾ
-
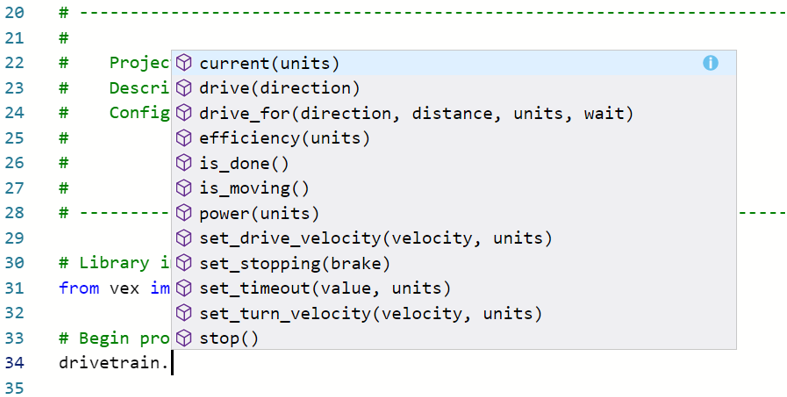
ഓട്ടോകംപ്ലീറ്റ് ഉപയോഗിക്കൽ
അധ്യാപക നുറുങ്ങുകൾ
-
ഓട്ടോകംപ്ലീറ്റ് ഉപയോഗിക്കൽ
നിങ്ങൾ ടൈപ്പ് ചെയ്യുന്ന കമാൻഡിന്റെ ബാക്കി ഭാഗങ്ങൾ പ്രവചിക്കുന്ന VEXcode V5 ലെ ഒരു സവിശേഷതയാണ് ഓട്ടോകംപ്ലീറ്റ്. വിദ്യാർത്ഥികൾ VEXcode V5-ൽ പ്രവർത്തിക്കുന്നതിനാൽ, പൈത്തൺ വാക്യഘടനയിൽ സഹായിക്കുന്നതിന് ഓട്ടോകംപ്ലീറ്റ് സവിശേഷത ഉപയോഗിക്കാൻ അവരെ പ്രോത്സാഹിപ്പിക്കുക. നിങ്ങൾ നിർദ്ദേശം ടൈപ്പ് ചെയ്യാൻ തുടങ്ങുമ്പോൾ ഒരു ഓട്ടോകംപ്ലീറ്റ് ഫംഗ്ഷൻ നിങ്ങൾ ശ്രദ്ധിച്ചേക്കാം. നിങ്ങൾക്ക് ആവശ്യമുള്ള പേര് തിരഞ്ഞെടുക്കാൻ നിങ്ങളുടെ “Up” ഉം “Down” ഉം കീകൾ ഉപയോഗിക്കുക, തുടർന്ന് തിരഞ്ഞെടുക്കാൻ നിങ്ങളുടെ കീബോർഡിൽ “Tab” അല്ലെങ്കിൽ (Enter/Return) അമർത്തുക. ഓട്ടോകംപ്ലീറ്റ് ഉപയോഗിക്കുന്നതിനെക്കുറിച്ചുള്ള കൂടുതൽ വിവരങ്ങൾക്ക് പൈത്തൺ ലേഖനംപരിശോധിക്കുക.
ആവശ്യമായ ഹാർഡ്വെയർ, എഞ്ചിനീയറിംഗ് നോട്ട്ബുക്ക്, VEXcode V5 എന്നിവ ഡൗൺലോഡ് ചെയ്ത് തയ്യാറായിട്ടുണ്ടെന്ന് ഉറപ്പാക്കുക.
| അളവ് | ആവശ്യമായ വസ്തുക്കൾ |
|---|---|
| 1 |
VEX V5 ക്ലാസ്റൂം സ്റ്റാർട്ടർ കിറ്റ് (കാലികമായ ഫേംവെയറോടുകൂടി) |
| 1 |
VEXcode V5 (ഏറ്റവും പുതിയ പതിപ്പ്, വിൻഡോസ്, macOS) |
| 1 |
എഞ്ചിനീയറിംഗ് നോട്ട്ബുക്ക് |
| 1 |
ക്ലോബോട്ട് ടെംപ്ലേറ്റ് (ഡ്രൈവ്ട്രെയിൻ 2-മോട്ടോർ, ഗൈറോ ഇല്ല) ഉദാഹരണ പ്രോജക്റ്റ് |
ഘട്ടം 1: ലൂപ്പുകൾ ഉപയോഗിച്ച് പ്രോഗ്രാമിംഗ് ആരംഭിക്കാം.
- നിങ്ങളുടെ പ്രോജക്റ്റ് ആരംഭിക്കുന്നതിന് മുമ്പ്, ശരിയായ ടെംപ്ലേറ്റ് പ്രോജക്റ്റ് തിരഞ്ഞെടുക്കുക. ക്ലോബോട്ട് ടെംപ്ലേറ്റ് (ഡ്രൈവ്ട്രെയിൻ 2-മോട്ടോർ, ഗൈറോ ഇല്ല) ഉദാഹരണ പ്രോജക്റ്റിൽ ക്ലോബോട്ടിന്റെ മോട്ടോർ കോൺഫിഗറേഷൻ അടങ്ങിയിരിക്കുന്നു. ടെംപ്ലേറ്റ് ഉപയോഗിക്കുന്നില്ലെങ്കിൽ, നിങ്ങളുടെ റോബോട്ട് പ്രോജക്റ്റ് ശരിയായി പ്രവർത്തിപ്പിക്കില്ല.
-
ഫയൽഉംതിരഞ്ഞെടുക്കുക ഉദാഹരണങ്ങൾ തുറക്കുക.
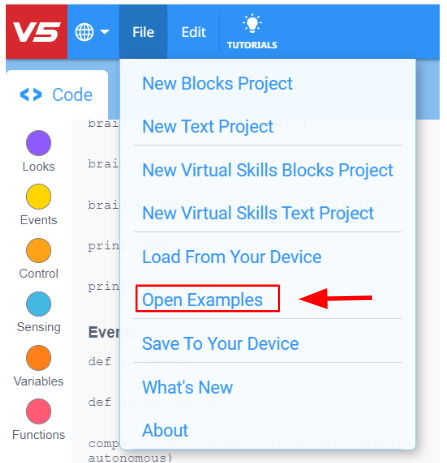
-
വ്യത്യസ്തഉദാഹരണംപ്രോജക്റ്റുകളിലൂടെ സ്ക്രോൾ ചെയ്യുക. നിങ്ങളുടെ ക്ലോബോട്ടിന് ചെയ്യാൻ കഴിയുന്ന വിവിധ പ്രവർത്തനങ്ങൾ ഈ പ്രോജക്റ്റുകൾ പ്രദർശിപ്പിക്കുന്നു. Clawbot Template (Drivetrain 2-motor, No Gyro)ഉദാഹരണ പ്രോജക്റ്റ് തിരഞ്ഞെടുത്ത് തുറക്കുക.

-
പ്രോജക്റ്റിന് RepeatingActions എന്ന് പേര് നൽകുക.

-
ഇനിപ്പറയുന്ന കോഡ് ടൈപ്പ് ചെയ്യുക:
# ലൈബ്രറി vex import ൽ നിന്ന് ഇറക്കുമതി ചെയ്യുന്നു * # പ്രോജക്റ്റ് കോഡ് ആരംഭിക്കുക # ഡ്രൈവുകൾ മുന്നോട്ട് 300mm 4 ആവർത്തനങ്ങൾക്ക് 90 ഡിഗ്രി തിരിയുന്നു ശ്രേണിയിലെ ആവർത്തന എണ്ണത്തിന് (4): drivetrain.drive_for(FORWARD, 300, MM) drivetrain.turn_for(RIGHT, 90, DEGREES) കാത്തിരിക്കുക (5, സെക്കൻഡ്)
പ്രോജക്റ്റ് പരിശോധിച്ച് നിങ്ങളുടെ എഞ്ചിനീയറിംഗ് നോട്ട്ബുക്കിൽ ഇനിപ്പറയുന്നവ ചെയ്യുക.
-
ക്ലോബോട്ട് എന്ത് ചെയ്യുമെന്ന് പ്രോജക്റ്റ് പ്രവചിക്കുക. പദ്ധതി ആവർത്തിക്കുന്ന വസ്തുതയേക്കാൾ കൂടുതൽ വിശദീകരിക്കുക.
എന്താണ് ഇത് ആവർത്തിക്കുന്നത്? ക്ലോബോട്ട് എന്താണ് ചെയ്യുന്നത്?
- നിങ്ങളുടെ പ്രവചനം എഴുതുക, പക്ഷേ ചെറിയ പ്രോജക്റ്റിനെ രണ്ടിൽ കൂടുതൽ ഭാഗങ്ങളായി വിഭജിക്കരുത്.
![]() ടീച്ചർ ടൂൾബോക്സ്
-
ഉത്തരങ്ങൾ
ടീച്ചർ ടൂൾബോക്സ്
-
ഉത്തരങ്ങൾ
-
ഈ പ്രോജക്റ്റിൽ ഒരു റോബോട്ട് ഉണ്ടായിരിക്കും: 300 മില്ലിമീറ്റർ മുന്നോട്ട് ഓടിക്കുക, വലത്തേക്ക് 90 ഡിഗ്രി തിരിക്കുക, തുടർന്ന് ഒരു ചതുരം പൂർത്തിയാക്കാൻ 5 സെക്കൻഡ് 4 തവണ കാത്തിരിക്കുക. ഒരേ 3 നിർദ്ദേശങ്ങൾ 4 തവണ ഉപയോഗിക്കുന്നതിന് പകരം, ആവർത്തിച്ചുള്ള നിർദ്ദേശം ആ തുക 1 തവണയായി കുറയ്ക്കുന്നു. ആവർത്തന നിർദ്ദേശം മുന്നോട്ട് ഡ്രൈവ് ചെയ്യുന്നതിനും പിന്നീട് തിരിയുന്നതിനുമുള്ള പ്രവർത്തനങ്ങൾ ആവർത്തിക്കുന്നു.
-
പ്രവചനം ലളിതമായി "ക്ലോബോട്ട് ഒരു ചതുരത്തിൽ നീങ്ങുന്നു" എന്നായിരിക്കാം. ക്ലോബോട്ടിന്റെ ആവർത്തിച്ചുള്ള ചലനങ്ങൾ പകർത്താൻ, സന്ദർഭത്തിന്റെ അഭാവത്തിൽ, ഇത് ഒരു സംക്ഷിപ്ത മാർഗമായിരിക്കും.
വിദ്യാർത്ഥികളുടെ എഞ്ചിനീയറിംഗ് നോട്ട്ബുക്കുകൾ പരിപാലിക്കുകയും വ്യക്തിഗതമായിഅല്ലെങ്കിൽടീം ആയിചെയ്യുകയും ചെയ്യാം. മുമ്പത്തെ ലിങ്കുകൾ ഓരോ സമീപനത്തിനും വ്യത്യസ്തമായ റൂബ്രിക് നൽകുന്നു. വിദ്യാഭ്യാസ ആസൂത്രണത്തിൽ ഒരു റൂബ്രിക് ഉൾപ്പെടുത്തുമ്പോഴെല്ലാം, പ്രവർത്തനം ആരംഭിക്കുന്നതിന് മുമ്പ് റൂബ്രിക് വിശദീകരിക്കുകയോ കുറഞ്ഞത് വിദ്യാർത്ഥികൾക്ക് പകർപ്പുകൾ നൽകുകയോ ചെയ്യുന്നത് നല്ല രീതിയാണ്.
-
ആവർത്തനപ്രോജക്റ്റ് സേവ് ചെയ്യുക, ഡൗൺലോഡ് ചെയ്യുക, പ്രവർത്തിപ്പിക്കുക.

- നിങ്ങളുടെ എഞ്ചിനീയറിംഗ് നോട്ട്ബുക്കിൽ പ്രോജക്റ്റിനെക്കുറിച്ചുള്ള വിശദീകരണങ്ങൾ പരിശോധിച്ച് ആവശ്യാനുസരണം അവ ശരിയാക്കാൻ കുറിപ്പുകൾ ചേർക്കുക.
ഘട്ടം 2: പ്രോജക്റ്റ് പ്രവർത്തിപ്പിച്ച് റോബോട്ടിനെ നിരീക്ഷിക്കുക.
ആവർത്തന പ്രവർത്തനങ്ങൾ പ്രോജക്റ്റ് (രണ്ടാമത്തെ പ്രോജക്റ്റ്) വീണ്ടും നോക്കുക. ഈ പ്രോജക്റ്റ് മുന്നോട്ടും പിന്നോട്ടും നാല് തവണ സ്വഭാവം ആവർത്തിക്കും. ഒരു നിശ്ചിത എണ്ണം തവണ പെരുമാറ്റങ്ങളുടെ ഒരു കൂട്ടം ഉപയോഗിക്കണമെങ്കിൽ ഒരു "ആവർത്തിക്കുക" ലൂപ്പ് ഘടന (ലൂപ്പിന്ഉപയോഗിക്കുന്നു) ഉപയോഗിക്കുന്നു.
ആവർത്തന ഘടന while ലൂപ്പ് ഘടന ഉപയോഗിച്ച് മാറ്റിസ്ഥാപിക്കുകയാണെങ്കിൽ, വ്യവസ്ഥ ശരിയാണെങ്കിൽ റോബോട്ട് മുന്നോട്ടും തിരിഞ്ഞും പെരുമാറ്റങ്ങൾ ആവർത്തിക്കും. ലൂപ്പ് എന്നെന്നേക്കുമായി തുടരുമ്പോൾഉണ്ടായിരിക്കുന്നതിന് നിങ്ങൾക്ക് "true" എന്ന അവസ്ഥയും സജ്ജമാക്കാം.
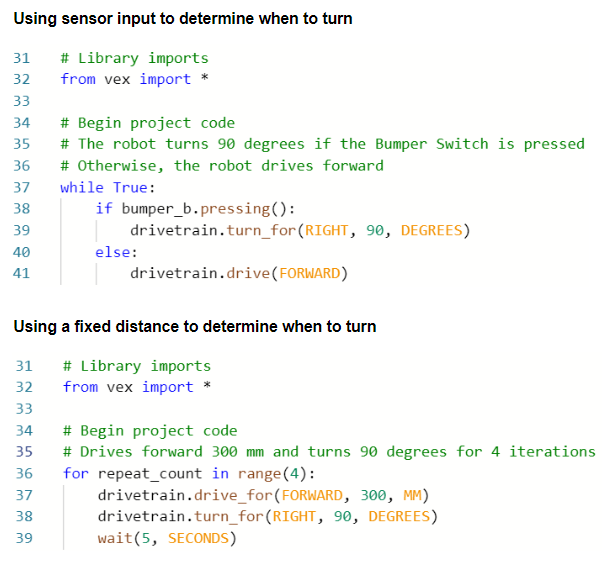
ആദ്യ പ്രോജക്റ്റിൽ, എപ്പോൾ തിരിയാൻ തുടങ്ങണമെന്ന് നിർണ്ണയിക്കാൻ ഒരു സെൻസറിന്റെ ഇൻപുട്ട് ഉപയോഗിക്കുന്നു. വലതുവശത്തുള്ള പ്രോജക്റ്റ് എപ്പോൾ തിരിയാൻ തുടങ്ങണമെന്ന് നിർണ്ണയിക്കാൻ ഒരു നിശ്ചിത ഡ്രൈവ്ട്രെയിൻ ദൂരം ഉപയോഗിക്കുന്നു.
ഒരു സെൻസറിന്റെ ഇൻപുട്ട് തുടർച്ചയായി പരിശോധിക്കുന്നതിന്, ഒരു if else സ്റ്റേറ്റ്മെന്റ് ഒരു while ലൂപ്പ് ഒരുമിച്ച് ഉപയോഗിക്കുന്നു. ഇടതുവശത്തുള്ള പ്രോജക്റ്റിൽ, "bumper_b" സെൻസർ അമർത്തുമ്പോൾ റോബോട്ട് വലത്തേക്ക് തിരിയും, അല്ലെങ്കിൽ "bumper_b" സെൻസർ അമർത്തുന്നില്ലെങ്കിൽ റോബോട്ട് എന്നെന്നേക്കുമായി മുന്നോട്ട് പോകും. bumper_b സെൻസറിന്റെ മൂല്യം തുടർച്ചയായി പരിശോധിക്കുന്നതിന്, if സ്റ്റേറ്റ്മെന്റ് ഒരു whileലൂപ്പിനുള്ളിലാണ്.
ആദ്യ പ്രോജക്റ്റ് എന്നെന്നേക്കുമായി ആവർത്തിക്കുന്ന ഒരു ഘടനയുടെ പ്രായോഗിക ഉപയോഗ-കേസാണ് -ഉംലൂപ്പുകളുംifസ്റ്റേറ്റ്മെന്റുകളും ഒരുമിച്ച് ഉപയോഗിക്കുന്നു. ഒരു സെൽഫ് ഡ്രൈവിംഗ് സ്വീപ്പർ ഒരു ഭിത്തിയിലോ വസ്തുവിലോ ഇടിക്കുന്നതുവരെ മുന്നോട്ട് ഓടിക്കൊണ്ടിരിക്കുന്നത് സങ്കൽപ്പിക്കുക, തുടർന്ന് തിരിഞ്ഞ് ഓടിക്കുന്നത് തുടരുക.
![]() നിങ്ങളുടെ പഠനം വിപുലീകരിക്കുക
നിങ്ങളുടെ പഠനം വിപുലീകരിക്കുക
കണ്ടീഷണലുകളുള്ള ലൂപ്പുകൾ എങ്ങനെ ഉപയോഗിക്കാമെന്ന് കൂടുതൽ പര്യവേക്ഷണം ചെയ്യുന്നതിന്, വിദ്യാർത്ഥികളെക്കൊണ്ട് VEXcode V5-ൽ ഒരു ഫ്ലോർ സ്വീപ്പർ പ്രോജക്റ്റ് നിർമ്മിക്കാൻ ആവശ്യപ്പെടുക.
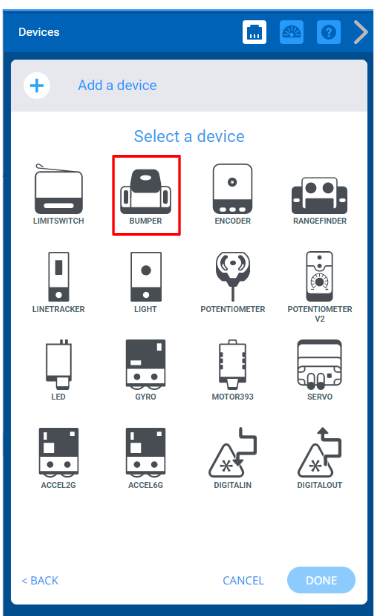
- വിദ്യാർത്ഥികളെ ബമ്പർ സ്വിച്ചുകൾചെയ്ത് വയർ ചെയ്യാൻ പറഞ്ഞുകൊണ്ട് ആരംഭിക്കുക.
-
Clawbot Template (Drivetrain 2-motor, No Gyro)ഉദാഹരണ പ്രോജക്റ്റ് തുറക്കാൻ വിദ്യാർത്ഥികളോട് ആവശ്യപ്പെടുക.

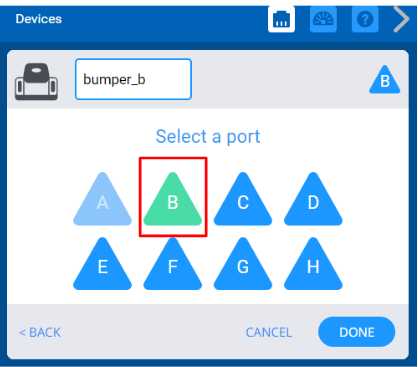
- VEXcode V5ൽ 3-വയർ ബമ്പർ സ്വിച്ച് കോൺഫിഗർ ചെയ്യാൻ വിദ്യാർത്ഥികളെ , BUMPERലേക്ക് നിങ്ങൾ ഉപയോഗിക്കുന്ന 3-വയർ ഉപകരണം തിരഞ്ഞെടുക്കുക, Bലേക്ക് പോർട്ട് തിരഞ്ഞെടുക്കുക.
-
വിദ്യാർത്ഥികളോട് പ്രോജക്റ്റിന് ഫ്ലോർ സ്വീപ്പർ എന്ന് പേരിടാൻ പറയൂ.

-
താഴെ പറയുന്ന പ്രോജക്റ്റ് നിർമ്മിക്കാൻ വിദ്യാർത്ഥികളോട് ആവശ്യപ്പെടുക.
# ലൈബ്രറി vex ഇമ്പോർട്ടിൽ നിന്ന് ഇമ്പോർട്ടുചെയ്യുന്നു * റാൻഡം ഇമ്പോർട്ടുചെയ്യുന്നു # പ്രോജക്റ്റ് കോഡ് ആരംഭിക്കുക while True: while (not bumper_b.pressing()): drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain.stop() #random.randomint() രീതി നിർദ്ദിഷ്ട ശ്രേണി നും ഇടയിലുള്ള ഒരു റാൻഡം പൂർണ്ണസംഖ്യ തിരികെ നൽകുന്നു # ശ്രേണിയുടെ ഏറ്റവും കുറഞ്ഞതും പരമാവധി മൂല്യങ്ങളും പാരാമീറ്ററുകളിലേക്ക് കൈമാറുക drivetrain.turn_for(RIGHT, (90+random.randint(0, 90)),DEGREES) wait(5, MSEC)
ഏതെങ്കിലും നിർദ്ദേശങ്ങളിൽ വിദ്യാർത്ഥികൾക്ക് സഹായം ആവശ്യമുണ്ടെങ്കിൽ,സഹായംവിവരങ്ങൾ അവരെ റഫർ ചെയ്യുക.
റോബോട്ട് എങ്ങനെ നീങ്ങുന്നുവെന്ന് നിരീക്ഷിക്കാൻ പ്രോജക്റ്റ്ഡൗൺലോഡ്പ്രവർത്തിപ്പിക്കാൻ വിദ്യാർത്ഥികളോട് ആവശ്യപ്പെടുക. പിന്നെ, ഒരു ക്ലാസ് ചർച്ച ആരംഭിച്ച്, ആവർത്തന ഘടനയ്ക്ക് പകരം ഫോറെവർ ഘടന ഉപയോഗിച്ചതിന്റെ കാരണം വിശദീകരിക്കാൻ വിദ്യാർത്ഥികളോട് ആവശ്യപ്പെടുക.
ബമ്പർ സ്വിച്ച് അമർത്തുന്നുണ്ടോ എന്ന് ഈ പ്രോജക്റ്റ് തുടർച്ചയായി പരിശോധിക്കുന്നതിനാൽ ഫോറെവർ ഘടനയാണ് ഉപയോഗിക്കുന്നതെന്ന് വിദ്യാർത്ഥികൾ ശ്രദ്ധിക്കണം.
ഘട്ടം 3: ചതുരാകൃതിയിലുള്ള ലൂപ്പ്സ് ചലഞ്ച്!

- നിങ്ങളുടെ ക്ലോബോട്ട് ഒരു ചതുരത്തിൽ ഡ്രൈവ് ചെയ്യട്ടെ.
- ഓരോ വളവിനും മുമ്പ്, നഖം തുറക്കുകയും അടയ്ക്കുകയും വേണം, കൈ ഉയർത്തുകയും താഴ്ത്തുകയും വേണം.
- ക്ലോബോട്ടിന് സ്ക്വയറിന്റെ ഒരു വശത്തുകൂടി ഒന്നിലധികം തവണ വാഹനമോടിക്കാൻ കഴിയില്ല.
- മുകളിലുള്ള RepeatingActions പ്രോജക്റ്റ് ഒരു ആരംഭ പോയിന്റായി നിങ്ങൾക്ക് ഉപയോഗിക്കാം, പക്ഷേ എന്തെങ്കിലും മാറ്റങ്ങൾ വരുത്തുന്നതിന് മുമ്പ് അത്SquaredLoopsആയി സേവ് ചെയ്യുക.

നിങ്ങളുടെ എഞ്ചിനീയറിംഗ് നോട്ട്ബുക്കിൽ, ഇനിപ്പറയുന്നവ പ്ലാൻ ചെയ്യുക:
- നിങ്ങളുടെ പരിഹാരം ആസൂത്രണം ചെയ്യുക, നിങ്ങളുടെ പ്രോജക്റ്റിലെ ഓരോ നിർദ്ദേശവും ക്ലോബോട്ട് എന്തുചെയ്യുമെന്ന് പ്രവചിക്കുക.
- സമർപ്പിക്കുന്നതിന് മുമ്പ് നിങ്ങളുടെ പ്രോജക്റ്റ് പരീക്ഷിക്കുന്നതിനായി ഡൗൺലോഡ് ചെയ്ത്.
- ആവശ്യാനുസരണം പ്രോജക്റ്റിൽ മാറ്റങ്ങൾ വരുത്തുക, പരിശോധനയ്ക്കിടെ എന്താണ് മാറ്റിയതെന്ന് കുറിപ്പുകൾ എടുക്കുക.
![]() ടീച്ചർ ടൂൾബോക്സ്
-
പരിഹാരം
ടീച്ചർ ടൂൾബോക്സ്
-
പരിഹാരം
സ്ക്വയേഡ് ലൂപ്സ് ചലഞ്ചിനുള്ള ഒരു സാധ്യതയുള്ള പരിഹാരം താഴെ കൊടുക്കുന്നു:
# ലൈബ്രറി vex import ൽ നിന്ന്
ഇംപോർട്ട് ചെയ്യുന്നു *
# repeat_count in range(4)-നുള്ള പ്രോജക്റ്റ് കോഡ്
ആരംഭിക്കുക:
drivetrain.drive_for(FORWARD, 300, MM)
claw_motor.spin_for(REVERSE, 70, DEGREES)
arm_motor.spin_for(FORWARD, 360, DEGREES)
claw_motor.spin_for(FORWARD, 70, DEGREES)
arm_motor.spin_for(REVERSE, 360, DEGREES)
drivetrain.turn_for(RIGHT, 90, DEGREES)
wait(5, MSEC)വിദ്യാർത്ഥികൾക്ക് അവരുടെ പ്രോജക്ടുകൾ സ്കോർ ചെയ്യുന്നതിന്പ്രോഗ്രാമിംഗ് റൂബ്രിക്നൽകാം.
വിദ്യാർത്ഥികളുടെ എഞ്ചിനീയറിംഗ് നോട്ട്ബുക്കുകൾ പരിപാലിക്കുകയുംവ്യക്തിഗതമായിഅല്ലെങ്കിൽടീമായിസ്കോർ ചെയ്യുകയും ചെയ്യാം.