
പ്രോഗ്രാമിംഗ് ഡ്രൈവ് ഫോർവേഡ് ആൻഡ് റിവേഴ്സ് - പൈത്തൺ
![]() ടീച്ചർ ടൂൾബോക്സ്
-
പ്രവർത്തന രൂപരേഖ
ടീച്ചർ ടൂൾബോക്സ്
-
പ്രവർത്തന രൂപരേഖ
ഈ പര്യവേഷണം വിദ്യാർത്ഥികളെ അടിസ്ഥാനപരമായ മുന്നോട്ട്, പിന്നോട്ട്, കാത്തിരിക്കൽ പ്രോഗ്രാമിംഗ് സ്വഭാവങ്ങളിലേക്ക് പരിചയപ്പെടുത്തും. ഈ അടിസ്ഥാന കഴിവുകൾ അവരെ അടുത്ത പ്രവർത്തനത്തിലും ഈ STEM ലാബിന്റെ അവസാനത്തിലെ സ്ട്രൈക്ക് ചലഞ്ചിലും വിജയിക്കാൻ സഹായിക്കും, അപ്പോൾ അവർ സ്പീഡ്ബോട്ട് ഉപയോഗിച്ച് ബൗളിംഗിൽ മത്സരിക്കും.
V5 സ്പീഡ്ബോട്ട് (ഡ്രൈവ്ട്രെയിൻ 2-മോട്ടോർ, ഗൈറോ ഇല്ല) ടെംപ്ലേറ്റ് പ്രോജക്റ്റ് ഉപയോഗിക്കുന്നത്, ഒരു നിർദ്ദേശം മാത്രം ഉപയോഗിച്ച് സ്പീഡ്ബോട്ട് മുന്നോട്ട് പോകുന്നതിനായി പ്രോഗ്രാം ചെയ്യാൻ വിദ്യാർത്ഥികളെ പ്രാപ്തരാക്കുന്നു.
സ്പീഡ്ബോട്ട് നീങ്ങാൻ തയ്യാറാണ്!
ഈ പര്യവേക്ഷണം നിങ്ങളുടെ സ്പീഡ്ബോട്ടിനെ ലളിതമായ ചലനങ്ങൾക്കായി പ്രോഗ്രാം ചെയ്യാൻ ആവശ്യമായ ഉപകരണങ്ങൾ നൽകും. ഈ പ്രവർത്തനത്തിന്റെ അവസാനം, മുന്നോട്ട്, പിന്നോട്ട്, കാത്തിരിക്കൽ സ്വഭാവങ്ങൾ ഉപയോഗിച്ച് നിങ്ങൾ ബാസ്കറ്റ്ബോൾ ഡ്രിൽസ് ചലഞ്ചിൽ ഏർപ്പെടും.
![]() ടീച്ചർ ടൂൾബോക്സ്
ടീച്ചർ ടൂൾബോക്സ്
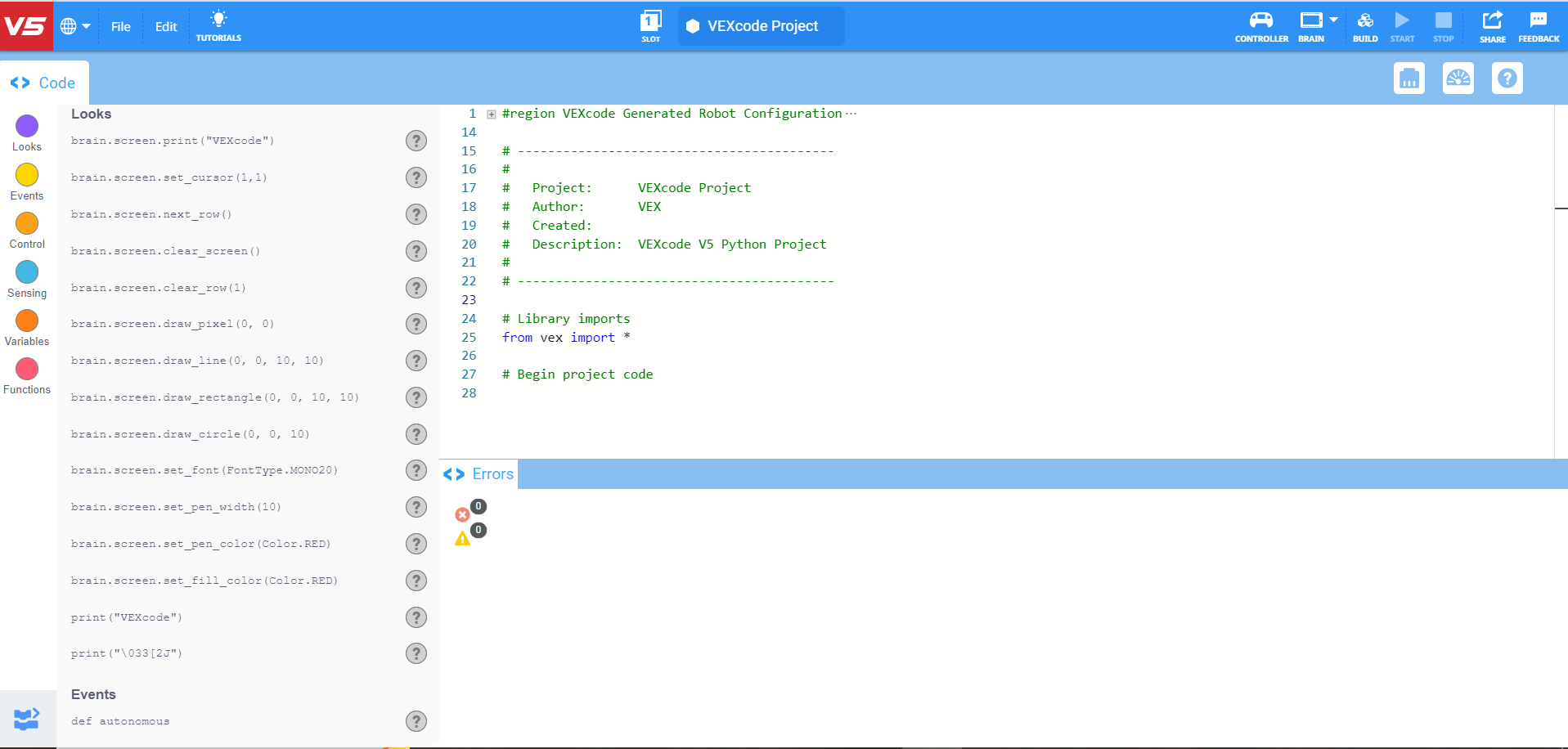
VEXcode V5 ന്റെ യൂസർ ഇന്റർഫേസിന്റെ ഒരു അവലോകനം ഇതാ. ഈ മൊമന്റം അല്ലെ STEM ലാബിലെ പ്രവർത്തനങ്ങളിൽ വിദ്യാർത്ഥികൾക്ക് ഈ ടാബുകൾ/ബട്ടണുകൾ പരിചയപ്പെടുത്തും. ഈ ടാബുകൾ/ബട്ടണുകൾ എന്നിവയെക്കുറിച്ച് കൂടുതൽ വിവരങ്ങൾ നൽകുന്നതിന് STEM ലാബിലുടനീളം ലിങ്കുകൾ നൽകിയിട്ടുണ്ട്.
- ഈ പര്യവേഷണത്തിൽ ഉപയോഗിക്കുന്ന VEXcode V5 പൈത്തൺ നിർദ്ദേശങ്ങൾ:
- ഡ്രൈവ്ട്രെയിൻ.ഡ്രൈവ്_ഫോർ(ഫോർവേഡ്, 200, എംഎം)
- കാത്തിരിക്കുക(1, സെക്കൻഡ്)
-
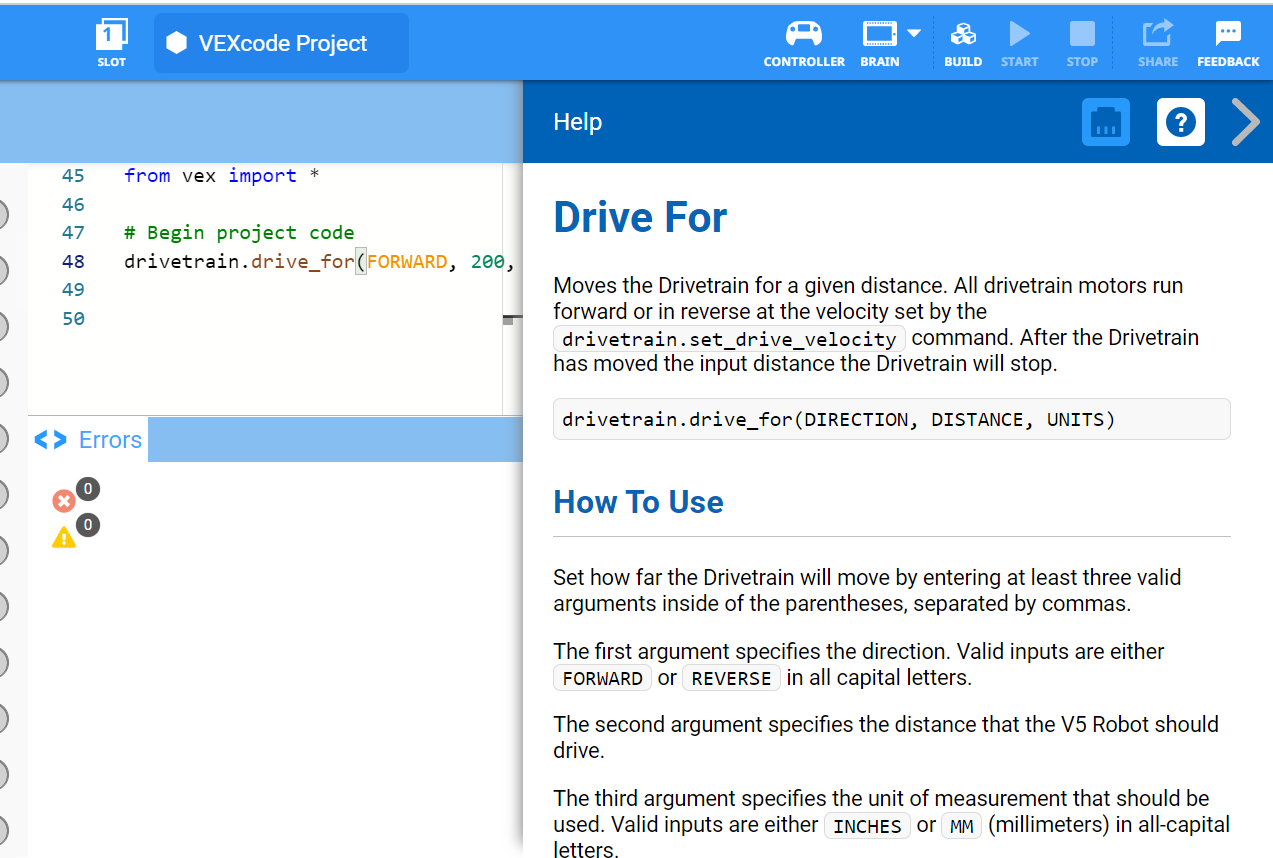
നിർദ്ദേശത്തെക്കുറിച്ച് കൂടുതൽ വിവരങ്ങൾ കണ്ടെത്താൻ, സഹായം തിരഞ്ഞെടുക്കുക, തുടർന്ന് കൂടുതൽ വിവരങ്ങൾ കാണുന്നതിന് ഒരു കമാൻഡിന് അടുത്തുള്ള ചോദ്യചിഹ്ന ഐക്കൺ തിരഞ്ഞെടുക്കുക.
- ആവശ്യമായ ഹാർഡ്വെയർ, എഞ്ചിനീയറിംഗ് നോട്ട്ബുക്ക്, VEXcode V5 എന്നിവ ഡൗൺലോഡ് ചെയ്ത് തയ്യാറായിട്ടുണ്ടെന്ന് ഉറപ്പാക്കുക.
![]() അധ്യാപക നുറുങ്ങുകൾ
അധ്യാപക നുറുങ്ങുകൾ
വിദ്യാർത്ഥി ആദ്യമായി VEXcode V5 ഉപയോഗിക്കുകയാണെങ്കിൽ, ഈ പര്യവേക്ഷണ വേളയിൽ ഏത് സമയത്തും അവർക്ക് ട്യൂട്ടോറിയലുകൾ റഫർ ചെയ്യാൻ കഴിയും.

| അളവ് | ആവശ്യമായ വസ്തുക്കൾ |
|---|---|
| 1 |
സ്പീഡ്ബോട്ട് റോബോട്ട് |
| 1 |
ചാർജ്ജ് ചെയ്ത റോബോട്ട് ബാറ്ററി |
| 1 |
VEXcode V5 |
| 1 |
യുഎസ്ബി കേബിൾ (കമ്പ്യൂട്ടർ ഉപയോഗിക്കുകയാണെങ്കിൽ) |
| 1 |
എഞ്ചിനീയറിംഗ് നോട്ട്ബുക്ക് |
![]() അധ്യാപക നുറുങ്ങുകൾ
അധ്യാപക നുറുങ്ങുകൾ
വിദ്യാർത്ഥികൾക്കായി ഓരോ പ്രശ്നപരിഹാര ഘട്ടങ്ങളും മാതൃകയാക്കുക.
ഘട്ടം 1: പര്യവേക്ഷണത്തിനുള്ള തയ്യാറെടുപ്പ്
പ്രവർത്തനം ആരംഭിക്കുന്നതിന് മുമ്പ്, ഈ ഇനങ്ങൾ ഓരോന്നും നിങ്ങളുടെ കൈവശം തയ്യാറായിട്ടുണ്ടോ? ഇനിപ്പറയുന്നവയിൽ ഓരോന്നും പരിശോധിക്കുക:
-
മോട്ടോറുകൾ ശരിയായപോർട്ടുകളിലേക്ക് പ്ലഗ് ചെയ്തിട്ടുണ്ടോ?
-
എല്ലാ മോട്ടോറുകളിലും സ്മാർട്ട് കേബിളുകൾപൂർണ്ണമായുംചേർത്തിട്ടുണ്ടോ?
-
ബാറ്ററിചാർജ്ജ്ആണോ?
ഘട്ടം 2: ഒരു പുതിയ പ്രോജക്റ്റ് ആരംഭിക്കുക
പദ്ധതി ആരംഭിക്കുന്നതിന് ഇനിപ്പറയുന്ന ഘട്ടങ്ങൾ പൂർത്തിയാക്കുക:
-
ഫയൽ മെനു തുറന്ന് ഉദാഹരണങ്ങൾ തുറക്കുക തിരഞ്ഞെടുക്കുക.

-
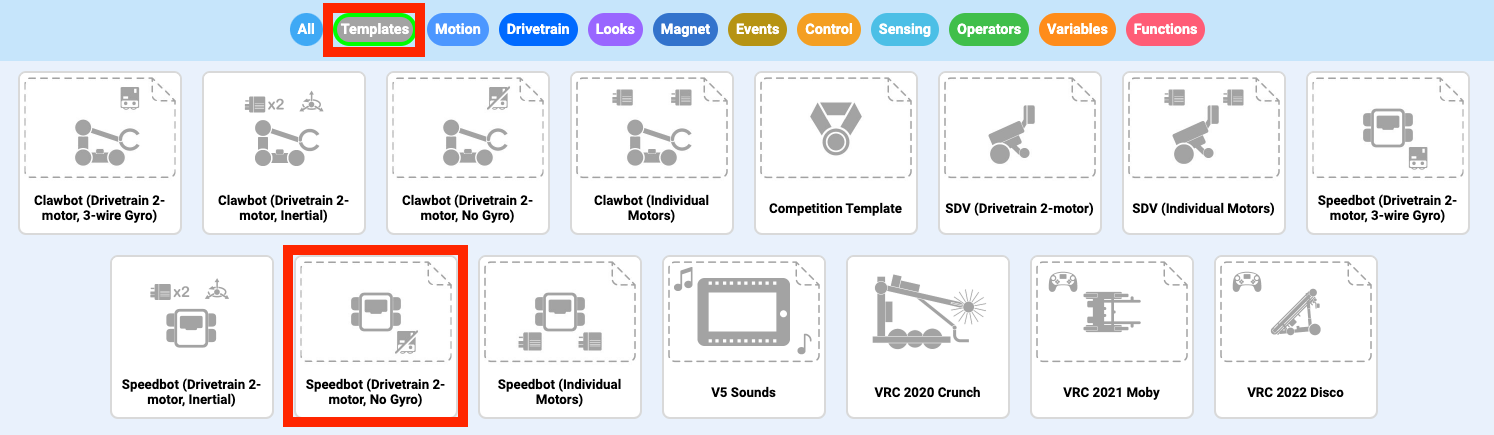
സ്പീഡ്ബോട്ട് (ഡ്രൈവ്ട്രെയിൻ 2-മോട്ടോർ, ഗൈറോ ഇല്ല) ടെംപ്ലേറ്റ് പ്രോജക്റ്റ് തിരഞ്ഞെടുത്ത് തുറക്കുക. ടെംപ്ലേറ്റ് പ്രോജക്റ്റിൽ സ്പീഡ്ബോട്ടിന്റെമോട്ടോർ കോൺഫിഗറേഷൻഅടങ്ങിയിരിക്കുന്നു. ടെംപ്ലേറ്റ് ഉപയോഗിക്കുന്നില്ലെങ്കിൽ, നിങ്ങളുടെ റോബോട്ട് പ്രോജക്റ്റ് ശരിയായി പ്രവർത്തിപ്പിക്കില്ല.
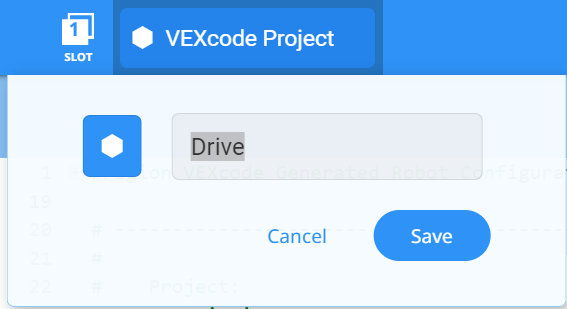
- സ്പീഡ്ബോട്ട് മുന്നോട്ടും പിന്നോട്ടും നീക്കുന്നതിൽ നിങ്ങൾ പ്രവർത്തിക്കുമെന്നതിനാൽ, നിങ്ങളുടെ പ്രോജക്റ്റിന്ഡ്രൈവ്എന്ന് പേരിടും. പ്രോജക്റ്റ് നാമം തിരഞ്ഞെടുക്കുക, 'Drive'എന്ന് ടൈപ്പ് ചെയ്യുക, തുടർന്ന് 'സേവ്' തിരഞ്ഞെടുക്കുക.
![]() അധ്യാപക നുറുങ്ങുകൾ
അധ്യാപക നുറുങ്ങുകൾ
-
പ്രോജക്റ്റ് നാമങ്ങളിൽ വാക്കുകൾക്കിടയിലോ ശേഷമോ ഇടങ്ങൾ ഉണ്ടാകാം.

-
പ്രോജക്റ്റ് നാമത്തിൽ വിദ്യാർത്ഥികളോട് അവരുടെ ഇനീഷ്യലുകളോ ഗ്രൂപ്പിന്റെ പേരോ ചേർക്കാൻ ആവശ്യപ്പെടാം. വിദ്യാർത്ഥികളോട് പ്രോജക്ടുകൾ സമർപ്പിക്കാൻ ആവശ്യപ്പെടുകയാണെങ്കിൽ, അവ വ്യത്യസ്തമാക്കാൻ ഇത് സഹായിക്കും.
-
നിങ്ങളുടെ വിദ്യാർത്ഥികൾ ശ്രമിക്കാവുന്ന പ്രോഗ്രാമിംഗുമായി ബന്ധപ്പെട്ട ആദ്യ പ്രവർത്തനമായതിനാൽ, നിങ്ങൾ ഘട്ടങ്ങൾ മാതൃകയാക്കണം, തുടർന്ന് അതേ പ്രവർത്തനങ്ങൾ പൂർത്തിയാക്കാൻ വിദ്യാർത്ഥികളോട് ആവശ്യപ്പെടണം. തുടർന്ന് അധ്യാപകൻ വിദ്യാർത്ഥികൾ ഘട്ടങ്ങൾ ശരിയായി പാലിക്കുന്നുണ്ടെന്ന് ഉറപ്പാക്കാൻ അവരെ നിരീക്ഷിക്കണം.
-
ഫയൽ മെനുവിൽ നിന്ന് വിദ്യാർത്ഥികൾ 'ഓപ്പൺ ഉദാഹരണങ്ങൾ' തിരഞ്ഞെടുത്തിട്ടുണ്ടെന്ന് ഉറപ്പാക്കുക.
-
വിദ്യാർത്ഥികൾ സ്പീഡ്ബോട്ട് (ഡ്രൈവ്ട്രെയിൻ 2-മോട്ടോർ, ഗൈറോ ഇല്ല) ടെംപ്ലേറ്റ് പ്രോജക്റ്റ് തിരഞ്ഞെടുത്തിട്ടുണ്ടെന്ന് ഉറപ്പാക്കുക.
-
ഉദാഹരണങ്ങൾ പേജിൽ നിന്ന് തിരഞ്ഞെടുക്കാൻ നിരവധി തിരഞ്ഞെടുപ്പുകൾ ഉണ്ടെന്ന് നിങ്ങൾക്ക് വിദ്യാർത്ഥികളെ ചൂണ്ടിക്കാണിക്കാം. അവർ മറ്റ് റോബോട്ടുകൾ നിർമ്മിക്കുകയും ഉപയോഗിക്കുകയും ചെയ്യുമ്പോൾ, അവർക്ക് വ്യത്യസ്ത ടെംപ്ലേറ്റുകൾ ഉപയോഗിക്കാനുള്ള അവസരം ലഭിക്കും.
-
ടൂൾബാറിന്റെ മധ്യത്തിലുള്ള വിൻഡോയിൽ ഇപ്പോൾ പ്രോജക്റ്റ് നാമംഡ്രൈവ്ആണെന്ന് ഉറപ്പാക്കുക.

![]() ടീച്ചർ ടൂൾബോക്സ്
-
സേവിംഗ് പ്രോജക്റ്റുകൾ
ടീച്ചർ ടൂൾബോക്സ്
-
സേവിംഗ് പ്രോജക്റ്റുകൾ
-
അവർ ആദ്യമായി VEXcode V5 തുറന്നപ്പോൾ, വിൻഡോയിൽ VEXcode Project എന്ന് ലേബൽ ചെയ്തിരുന്നുവെന്ന് ചൂണ്ടിക്കാണിക്കുക. VEXcode V5 ആദ്യമായി തുറക്കുമ്പോൾ, VEXcode Project എന്നത് ഡിഫോൾട്ട് പ്രോജക്റ്റ് നാമമാണ്. പ്രോജക്റ്റ് ഡ്രൈവ് എന്ന് പുനർനാമകരണം ചെയ്ത് സേവ് ചെയ്തുകഴിഞ്ഞാൽ, പുതിയ പ്രോജക്റ്റ് പേര് കാണിക്കുന്നതിനായി ഡിസ്പ്ലേ അപ്ഡേറ്റ് ചെയ്തു. ടൂൾബാറിലെ ഈ വിൻഡോ ഉപയോഗിച്ച്, വിദ്യാർത്ഥികൾ ശരിയായ പ്രോജക്റ്റ് ഉപയോഗിക്കുന്നുണ്ടോ എന്ന് പരിശോധിക്കാൻ എളുപ്പമാണ്.
-
വിദ്യാർത്ഥികളോട് അവരുടെ ആദ്യ പ്രോജക്റ്റ് ആരംഭിക്കാൻ തയ്യാറാണെന്ന് പറയുക. കുറച്ച് ലളിതമായ ഘട്ടങ്ങൾ പിന്തുടർന്നുകൊണ്ട്, സ്പീഡ്ബോട്ടിനെ മുന്നോട്ട് കൊണ്ടുപോകുന്ന ഒരു പ്രോജക്റ്റ് സൃഷ്ടിക്കാനും പ്രവർത്തിപ്പിക്കാനും അവർക്ക് കഴിയുമെന്ന് വിദ്യാർത്ഥികളോട് വിശദീകരിക്കുക.
-
വിദ്യാർത്ഥികളെ അവരുടെ പ്രോജക്ടുകൾ പ്രവർത്തിക്കുമ്പോൾ അവ സംരക്ഷിക്കാൻ ഓർമ്മിപ്പിക്കുക. VEX ലൈബ്രറിയിൽ നിന്നുള്ള പൈത്തൺ വിഭാഗങ്ങൾ VEXcode V5 ലെ സേവിംഗ് രീതികൾ വിശദീകരിക്കുന്നു.
![]() ടീച്ചർ ടൂൾബോക്സ്
-
നിർത്തി ചർച്ച ചെയ്യുക
ടീച്ചർ ടൂൾബോക്സ്
-
നിർത്തി ചർച്ച ചെയ്യുക
VEXcode V5-ൽ ഒരു പുതിയ പ്രോജക്റ്റ് ആരംഭിക്കുന്നതിനുള്ള ഘട്ടങ്ങൾ വ്യക്തിഗതമായോ ഗ്രൂപ്പുകളായോ വിദ്യാർത്ഥികളെക്കൊണ്ട് അവലോകനം ചെയ്യിപ്പിക്കുന്നതിന് ഇത് ഒരു നല്ല പോയിന്റാണ്. വിദ്യാർത്ഥികളോട് അവരുടെ ഗ്രൂപ്പിനുള്ളിലോ മുഴുവൻ ക്ലാസിലോ പങ്കുവെക്കുന്നതിന് മുമ്പ് വ്യക്തിപരമായി ചിന്തിക്കാൻ ആവശ്യപ്പെടുക.
ഘട്ടം 3: മുന്നോട്ട് ഡ്രൈവ് ചെയ്യുക
റോബോട്ട് മുന്നോട്ട് ഓടിക്കുന്നതിനായി പ്രോഗ്രാം ചെയ്യാൻ നിങ്ങൾ ഇപ്പോൾ തയ്യാറാണ്!
-
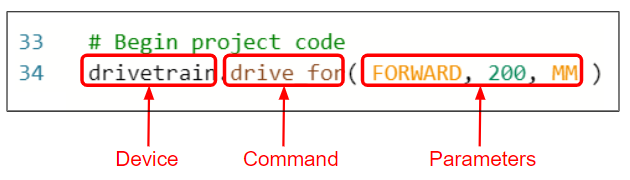
പ്രോഗ്രാമിംഗ് ആരംഭിക്കുന്നതിന് മുമ്പ്, ഒരു നിർദ്ദേശം എന്താണെന്ന് നമ്മൾ മനസ്സിലാക്കേണ്ടതുണ്ട്. ഒരു നിർദ്ദേശത്തിന് മൂന്ന് ഭാഗങ്ങളുണ്ട്. VEXcode V5 പൈത്തണിലെ കോഡിന്റെ വർണ്ണവൽക്കരണത്തെക്കുറിച്ചുള്ള കൂടുതൽ വിവരങ്ങൾക്ക്, ഈ ലേഖനം കാണുക.
-
നിങ്ങളുടെ പ്രോജക്റ്റ് ഇതുപോലെ കാണപ്പെടുന്നതിന്, പ്രോജക്റ്റിലേക്ക് നിർദ്ദേശങ്ങൾ ചേർക്കുക:
# ലൈബ്രറി vex import ൽ നിന്ന് ഇംപോർട്ട് ചെയ്യുന്നു * # begin project code drivetrain.drive_for(FORWARD, 100, MM)
![]() അധ്യാപക നുറുങ്ങുകൾ
അധ്യാപക നുറുങ്ങുകൾ
നിങ്ങൾ നിർദ്ദേശം ടൈപ്പ് ചെയ്യാൻ തുടങ്ങുമ്പോൾ ഒരു ഓട്ടോകംപ്ലീറ്റ് ഫംഗ്ഷൻ നിങ്ങൾ ശ്രദ്ധിച്ചേക്കാം. നിങ്ങൾക്ക് ആവശ്യമുള്ള പേര് തിരഞ്ഞെടുക്കാൻ നിങ്ങളുടെ "Up", "Down" കീകൾ ഉപയോഗിക്കുക, തുടർന്ന് തിരഞ്ഞെടുക്കാൻ നിങ്ങളുടെ കീബോർഡിൽ "Tab" അല്ലെങ്കിൽ (Enter/Return) അമർത്തുക. ഈ സവിശേഷതയെക്കുറിച്ചുള്ള കൂടുതൽ വിവരങ്ങൾക്ക് പൈത്തൺ ലേഖനംപരിശോധിക്കുക. 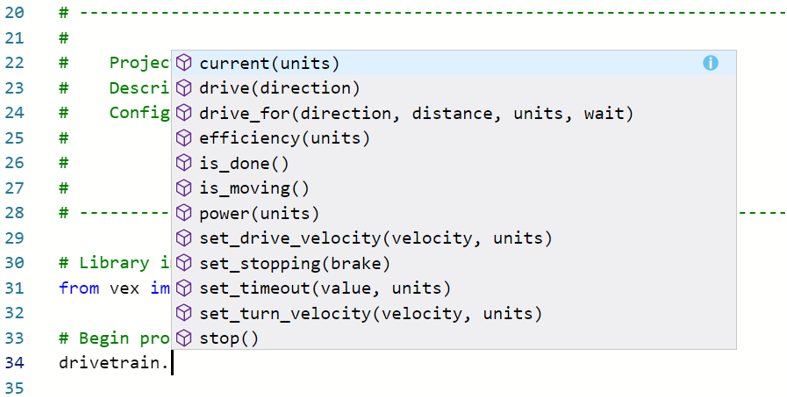
-
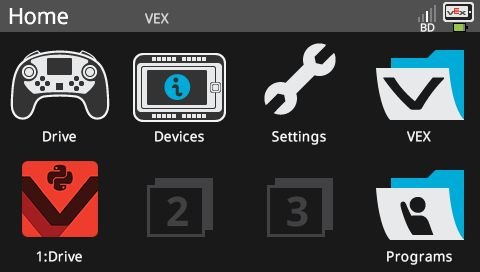
റോബോട്ട് ബ്രെയിനിൽ ലഭ്യമായ എട്ട് സ്ലോട്ടുകളിൽ ഒന്ന് തിരഞ്ഞെടുക്കാൻ സ്ലോട്ട് ഐക്കൺ തിരഞ്ഞെടുത്ത് സ്ലോട്ട് 1 തിരഞ്ഞെടുക്കുക.

-
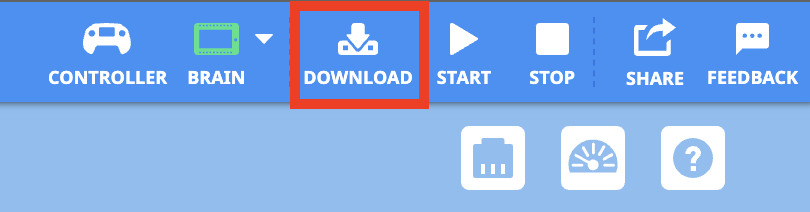
ഒരു മൈക്രോ യുഎസ്ബി കേബിൾ ഉപയോഗിച്ച് V5 റോബോട്ട് ബ്രെയിൻ കമ്പ്യൂട്ടറുമായി ബന്ധിപ്പിച്ച് V5 റോബോട്ട് ബ്രെയിൻ ഓൺ ചെയ്യുക. കണക്ഷൻ വിജയകരമായി പൂർത്തിയായിക്കഴിഞ്ഞാൽ, ടൂൾബാറിലെബ്രെയിൻ ഐക്കൺ പച്ചആയി മാറുന്നു.

-
പ്രോജക്റ്റ് ബ്രെയിനിലേക്ക് ഡൗൺലോഡ് ചെയ്യാൻഡൗൺലോഡ്തിരഞ്ഞെടുക്കുക.

![]() ടീച്ചർ ടൂൾബോക്സ്
ടീച്ചർ ടൂൾബോക്സ്
റോബോട്ട് ബ്രെയിനിൽ നിന്ന് യുഎസ്ബി കേബിൾ വിച്ഛേദിക്കാൻ വിദ്യാർത്ഥികളെ ഓർമ്മിപ്പിക്കുക. ഒരു പ്രോജക്റ്റ് പ്രവർത്തിപ്പിക്കുമ്പോൾ റോബോട്ട് ഒരു കമ്പ്യൂട്ടറുമായി ബന്ധിപ്പിച്ചിരിക്കുന്നത് റോബോട്ട് കണക്ഷൻ കേബിളിൽ വലിക്കാൻ ഇടയാക്കും.
![]() ടീച്ചർ ടൂൾബോക്സ്
-
നിർത്തി ചർച്ച ചെയ്യുക
ടീച്ചർ ടൂൾബോക്സ്
-
നിർത്തി ചർച്ച ചെയ്യുക
ഈ പ്രോജക്റ്റ് ഡൗൺലോഡ് ചെയ്ത് സ്പീഡ്ബോട്ടിൽ പ്രവർത്തിപ്പിക്കുമ്പോൾ എന്ത് സംഭവിക്കുമെന്ന് വിദ്യാർത്ഥികൾക്ക് പ്രവചിക്കാൻ ആവശ്യപ്പെടുക. വിദ്യാർത്ഥികളോട് അവരുടെ എഞ്ചിനീയറിംഗ് നോട്ട്ബുക്കുകളിൽ അവരുടെ പ്രവചനങ്ങൾ രേഖപ്പെടുത്താൻ പറയുക. സമയം അനുവദിക്കുമെങ്കിൽ, ഓരോ ഗ്രൂപ്പിനോടും അവരുടെ പ്രവചനം പങ്കിടാൻ ആവശ്യപ്പെടുക.
![]() ടീച്ചർ ടൂൾബോക്സ്
-
മോഡൽ ആദ്യം
ടീച്ചർ ടൂൾബോക്സ്
-
മോഡൽ ആദ്യം
- എല്ലാ വിദ്യാർത്ഥികളെയും ഒരുമിച്ച് പരീക്ഷിക്കുന്നതിന് മുമ്പ്, ക്ലാസ്സിന് മുന്നിൽ പ്രോജക്റ്റ് നടത്തുന്ന മാതൃക. വിദ്യാർത്ഥികളെ ഒരു സ്ഥലത്ത് ഒരുമിച്ചുകൂട്ടുക, സ്പീഡ്ബോട്ട് തറയിൽ വച്ചാൽ അതിന് നീങ്ങാൻ മതിയായ ഇടം നൽകുക.
- വിദ്യാർത്ഥികളോട് പറയുക, ഇനി അവരുടെ പ്രോജക്റ്റ് നടത്താനുള്ള ഊഴമാണ്. അവയ്ക്ക് വ്യക്തമായ പാതയുണ്ടെന്നും സ്പീഡ്ബോട്ടുകളൊന്നും പരസ്പരം കൂട്ടിയിടിക്കുന്നില്ലെന്നും ഉറപ്പാക്കുക.
-
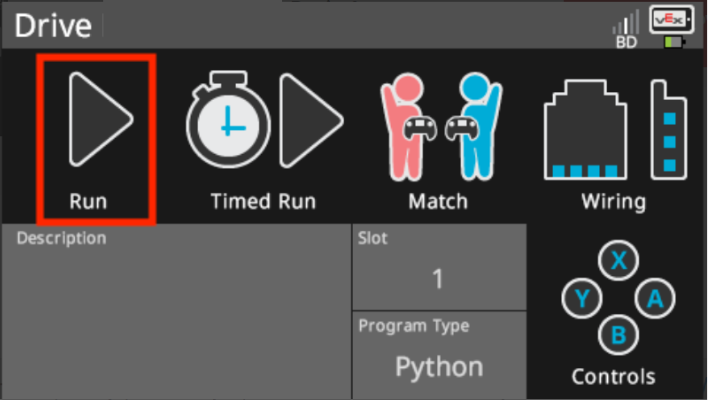
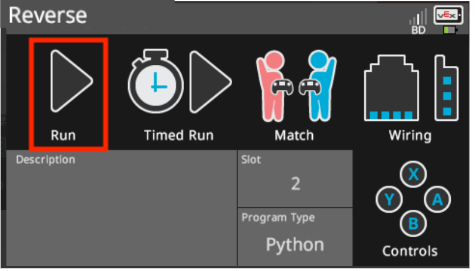
പ്രോജക്റ്റ് തിരഞ്ഞെടുത്തിട്ടുണ്ടെന്ന് ഉറപ്പാക്കി റോബോട്ടിൽ പ്രോജക്റ്റ് പ്രവർത്തിപ്പിക്കുക (പൈത്തൺ), തുടർന്ന് റോബോട്ട് ബ്രെയിനിലെറൺബട്ടൺ അമർത്തുക. നിങ്ങളുടെ ആദ്യ പ്രോജക്റ്റ് സൃഷ്ടിച്ചതിന് അഭിനന്ദനങ്ങൾ!
ഘട്ടം 4: ഡ്രൈവ് റിവേഴ്സ് ചെയ്യുക
ഇപ്പോൾ നിങ്ങൾ റോബോട്ട് മുന്നോട്ട് ഓടിക്കാൻ പ്രോഗ്രാം ചെയ്തു കഴിഞ്ഞു, നമുക്ക് അത് പിന്നിലേക്ക് ഓടിക്കാൻ പ്രോഗ്രാം ചെയ്യാം.
-
drive_for നിർദ്ദേശത്തിലെ പാരാമീറ്റർ FORWARDന് പകരം REVERSEപ്രദർശിപ്പിക്കാൻ മാറ്റുക, അങ്ങനെ നിങ്ങളുടെ പ്രോജക്റ്റ് ഇതുപോലെ കാണപ്പെടും:
# ലൈബ്രറി vex import ൽ നിന്ന് ഇംപോർട്ട് ചെയ്യുന്നു * # പ്രോജക്റ്റ് കോഡ് ആരംഭിക്കുക drivetrain.drive_for(REVERSE, 100, MM) -
ഡ്രൈവ്ൽ നിന്ന്റിവേഴ്സ്ലേക്ക് മാറ്റാൻ പ്രോജക്റ്റ് നാമം തിരഞ്ഞെടുക്കുക.

-
ഒരു പുതിയ സ്ലോട്ട് തിരഞ്ഞെടുക്കാൻ സ്ലോട്ട് ഐക്കൺ തിരഞ്ഞെടുക്കുക. സ്ലോട്ട് 2 തിരഞ്ഞെടുക്കുക.

-
(പൈത്തൺൽ) പ്രോജക്റ്റ് ഡൗൺലോഡ് ചെയ്യുക.
-
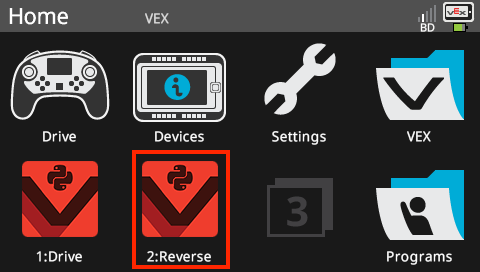
റോബോട്ട് ബ്രെയിനിന്റെ സ്ക്രീൻ നോക്കി നിങ്ങളുടെ പ്രോജക്റ്റ് (പൈത്തൺൽ) ഡൗൺലോഡ് ചെയ്തിട്ടുണ്ടെന്ന് ഉറപ്പാക്കുക. സ്ലോട്ട് 2-ൽ പ്രോജക്റ്റ് നാമംറിവേഴ്സ്ലിസ്റ്റ് ചെയ്തിരിക്കണം.
-
പ്രോജക്റ്റ് തിരഞ്ഞെടുത്തിട്ടുണ്ടെന്ന് ഉറപ്പാക്കി റോബോട്ടിൽ പ്രോജക്റ്റ് പ്രവർത്തിപ്പിക്കുക ( പൈത്തൺൽ), തുടർന്ന് റോബോട്ട് ബ്രെയിനിലെറൺബട്ടൺ അമർത്തുക.
![]() ടീച്ചർ ടൂൾബോക്സ്
-
ഘട്ടം 4 പൂർത്തിയാക്കുന്നു
ടീച്ചർ ടൂൾബോക്സ്
-
ഘട്ടം 4 പൂർത്തിയാക്കുന്നു
- drive_for കമാൻഡ് ഫോർവേഡ് ൽ നിന്ന് റിവേഴ്സ്ആക്കി മാറ്റാൻ, ആദ്യത്തെ പാരാമീറ്റർ റിവേഴ്സ്ആക്കി മാറ്റുക. ഇത് ഡ്രൈവ്ട്രെയിനിലെ മോട്ടോറുകൾ വിപരീത ദിശയിലേക്ക് നീങ്ങാൻ ഇടയാക്കും.
- മില്ലീമീറ്ററിന്റെ എണ്ണം മാറ്റാൻ കഴിയും, എന്നാൽ ഈ ഉദാഹരണത്തിന്, മുമ്പത്തെ ഘട്ടത്തിൽ സജ്ജമാക്കിയതുപോലെ അവയെ 100 മില്ലീമീറ്ററിൽ വിടും.
- പ്രോജക്റ്റ് പ്രവർത്തിപ്പിക്കുന്നതിന് മുമ്പ് റോബോട്ട് ബ്രെയിനിൽ നിന്ന് യുഎസ്ബി കേബിൾ വിച്ഛേദിക്കാൻ വിദ്യാർത്ഥികളെ ഓർമ്മിപ്പിക്കുക.
- വിദ്യാർത്ഥികളെ അവരുടെ പ്രോജക്ടുകൾ പ്രവർത്തിക്കുമ്പോൾ അവ സംരക്ഷിക്കാൻ ഓർമ്മിപ്പിക്കുക. VEX ലൈബ്രറിയിൽ നിന്നുള്ള പൈത്തൺ വിഭാഗങ്ങൾ VEXcode V5 ലെ സേവിംഗ് രീതികൾ വിശദീകരിക്കുന്നു.
ഘട്ടം 5: കാത്തിരുന്ന ശേഷം പിന്നിലേക്ക് ഡ്രൈവ് ചെയ്യുക
ഇപ്പോൾ നമ്മൾ റോബോട്ടിനെ മുന്നോട്ടും പിന്നോട്ടും ഡ്രൈവ് ചെയ്യാൻ പ്രോഗ്രാം ചെയ്തിട്ടുണ്ട്, ഇനി നമുക്ക് വെയ്റ്റ് നിർദ്ദേശം ചേർക്കാൻ കഴിയും, അങ്ങനെ റോബോട്ട് ഒരു നിശ്ചിത സമയം കാത്തിരുന്ന് റിവേഴ്സ് ഡ്രൈവ് ചെയ്യും.
-
drive_for കമാൻഡിന് മുമ്പ് wait നിർദ്ദേശം ചേർക്കുക. wait , drive_for കമാൻഡുമായി പൊരുത്തപ്പെടുന്നതിന് ഇൻഡന്റ് ചെയ്തിട്ടുണ്ടെന്നും എല്ലാ കമാൻഡുകളും “Begin project code” കമന്റിന് താഴെയാണെന്നും ഉറപ്പാക്കുക. ഇത് റോബോട്ടിനോട് മൂന്ന് സെക്കൻഡ് കാത്തിരിക്കാനും പിന്നീട് റിവേഴ്സ് ഡ്രൈവ് ചെയ്യാനും പറയുന്നു.
കാത്തിരിക്കുക(3, സെക്കൻഡ്) drivetrain.drive_for(REVERSE, 100, MM) -
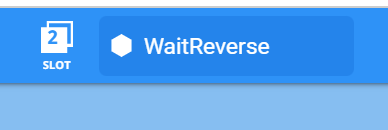
Reverse ൽ നിന്ന് WaitReverseആക്കി മാറ്റാൻ Project Name തിരഞ്ഞെടുക്കുക.
-
ഒരു പുതിയ സ്ലോട്ട് തിരഞ്ഞെടുക്കാൻ സ്ലോട്ട് ഐക്കൺ തിരഞ്ഞെടുക്കുക. സ്ലോട്ട് 3 തിരഞ്ഞെടുക്കുക.

-
(പൈത്തൺൽ) പ്രോജക്റ്റ് ഡൗൺലോഡ് ചെയ്യുക.

-
റോബോട്ട് ബ്രെയിനിന്റെ സ്ക്രീൻ നോക്കി നിങ്ങളുടെ പ്രോജക്റ്റ് ( പൈത്തൺൽ) ഡൗൺലോഡ് ചെയ്തിട്ടുണ്ടെന്ന് ഉറപ്പാക്കുക. WaitReverse എന്ന പ്രോജക്റ്റ് നാമം സ്ലോട്ട് 3-ൽ ലിസ്റ്റ് ചെയ്തിരിക്കണം.
-
പ്രോജക്റ്റ് തിരഞ്ഞെടുത്തിട്ടുണ്ടെന്ന് ഉറപ്പാക്കി റോബോട്ടിൽ പ്രോജക്റ്റ് പ്രവർത്തിപ്പിക്കുക ( പൈത്തൺൽ), തുടർന്ന്റൺബട്ടൺ അമർത്തുക.

![]() ടീച്ചർ ടൂൾബോക്സ്
-
ഘട്ടം 5 പൂർത്തിയാക്കുന്നു
ടീച്ചർ ടൂൾബോക്സ്
-
ഘട്ടം 5 പൂർത്തിയാക്കുന്നു
- wait കമാൻഡ് ഉപയോഗിക്കുന്നത് പ്രോജക്റ്റ് അവസാനിപ്പിക്കില്ല, അത് റോബോട്ടിക് ചലനത്തെ താൽക്കാലികമായി നിർത്തുക മാത്രമേ ചെയ്യുന്നുള്ളൂ.
- വിദ്യാർത്ഥികൾ ഒരു കമ്പ്യൂട്ടർ ഉപയോഗിക്കുകയാണെങ്കിൽ, പ്രോജക്റ്റ് പ്രവർത്തിപ്പിക്കുന്നതിന് മുമ്പ് റോബോട്ട് ബ്രെയിനിൽ നിന്ന് യുഎസ്ബി കേബിൾ വിച്ഛേദിക്കാൻ അവരെ ഓർമ്മിപ്പിക്കുക.
- വിദ്യാർത്ഥികളെ അവരുടെ പ്രോജക്ടുകൾ പ്രവർത്തിക്കുമ്പോൾ അവ സംരക്ഷിക്കാൻ ഓർമ്മിപ്പിക്കുക. VEX ലൈബ്രറിയിൽ നിന്നുള്ള പൈത്തൺ വിഭാഗം VEXcode V5 ലെ സേവിംഗ് രീതികൾ വിശദീകരിക്കുന്നു.
ഘട്ടം 6: ബാസ്കറ്റ്ബോൾ ഡ്രിൽസ് ചലഞ്ച് പൂർത്തിയാക്കുക!
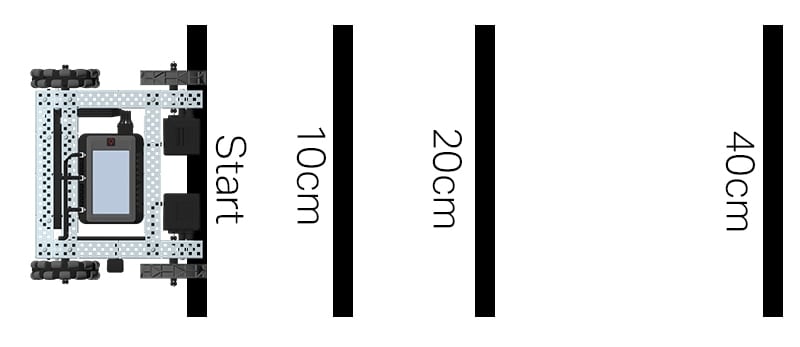
ബാസ്കറ്റ്ബോൾ ഡ്രിൽസ് ചലഞ്ചിൽ, റോബോട്ടിന് വ്യത്യസ്ത ദൂരങ്ങളിൽ നിരവധി ലൈനുകൾ നാവിഗേറ്റ് ചെയ്യാൻ കഴിയണം. റോബോട്ട് ആരംഭ സ്ഥാനത്ത് നിന്ന് 10 സെന്റീമീറ്റർ അകലെയുള്ള ആദ്യ വരിയിലേക്ക് മുന്നോട്ട് സഞ്ചരിക്കും, ഒരു സെക്കൻഡ് കാത്തിരിക്കുക, തുടർന്ന് പിന്നിലേക്ക് സഞ്ചരിച്ച് അതേ വരിയിലേക്ക് മടങ്ങും. തുടർന്ന് റോബോട്ട് രണ്ടാമത്തെ വരിയിലേക്ക് 20 സെന്റീമീറ്റർ മുന്നോട്ട് ഡ്രൈവ് ചെയ്ത്, 1 സെക്കൻഡ് കാത്തിരുന്ന്, യഥാർത്ഥ ആരംഭ വരിയിലേക്ക് പിന്നിലേക്ക് ഡ്രൈവ് ചെയ്തുകൊണ്ട് പ്രവർത്തനം ആവർത്തിക്കും. റോബോട്ട് 40 സെന്റീമീറ്റർ അകലത്തിൽ മൂന്നാമത്തെ വരിയിലേക്ക് മുന്നോട്ട് ഓടിച്ചുപോകും, ഒരു സെക്കൻഡ് കാത്തിരിക്കും, തുടർന്ന് വെല്ലുവിളി പൂർത്തിയാക്കാൻ ആരംഭ വരിയിലേക്ക് മടങ്ങും.
റോബോട്ട് പ്രോഗ്രാം ചെയ്യുന്നതിനുമുമ്പ്, നിങ്ങളുടെ എഞ്ചിനീയറിംഗ് നോട്ട്ബുക്കിൽ റോബോട്ടിന്റെ പാതയും പെരുമാറ്റങ്ങളും ആസൂത്രണം ചെയ്യുക.
ബാസ്കറ്റ്ബോൾ ചലഞ്ച് പൂർത്തിയാക്കിയ ശേഷം, കൂടുതൽ നൂതനമായ വെല്ലുവിളികൾ പൂർത്തിയാക്കുന്നതിന് നിങ്ങൾക്ക് മുന്നോട്ടും പിന്നോട്ടും ചലനങ്ങൾ അധിക റോബോട്ട് പെരുമാറ്റങ്ങളുമായി സംയോജിപ്പിക്കാൻ കഴിയും.
പ്രോഗ്രാം ചെയ്യുമ്പോൾ 1 സെ.മീ = 10 മി.മീ എന്ന് ഓർമ്മിക്കുക.
![]() ടീച്ചർ ടൂൾബോക്സ്
-
നിർത്തി ചർച്ച ചെയ്യുക
ടീച്ചർ ടൂൾബോക്സ്
-
നിർത്തി ചർച്ച ചെയ്യുക
മുഴുവൻ ക്ലാസിലും ചർച്ച ചെയ്യുന്നതിന് മുമ്പ് വിദ്യാർത്ഥികളോട് അവരുടെ പരിഹാരങ്ങൾ ജോഡികളായി പങ്കിടാൻ ആവശ്യപ്പെടുക. ചർച്ച സുഗമമാക്കാൻ, ഇങ്ങനെ ചോദിക്കുക:
- ഈ വെല്ലുവിളി പ്രോഗ്രാം ചെയ്യുമ്പോൾ എന്തെങ്കിലും ബുദ്ധിമുട്ടുകൾ നേരിട്ടോ?
- നിങ്ങളുടെ പ്രോജക്റ്റിനെ അടിസ്ഥാനമാക്കി, നിങ്ങൾ പ്രതീക്ഷിച്ചതുപോലെയാണോ നിങ്ങളുടെ റോബോട്ട് പെരുമാറിയത്? എന്തുകൊണ്ട് അല്ലെങ്കിൽ എന്തുകൊണ്ട്?
- നിങ്ങൾക്ക് ആ വെല്ലുവിളി മറികടക്കാൻ കഴിയുമായിരുന്നെങ്കിൽ, നിങ്ങൾ വ്യത്യസ്തമായി എന്തെങ്കിലും ചെയ്യുമായിരുന്നോ?
![]() ടീച്ചർ ടൂൾബോക്സ്
-
പരിഹാരം
ടീച്ചർ ടൂൾബോക്സ്
-
പരിഹാരം
താഴെ ഒരു സാമ്പിൾ പരിഹാരം കാണുക:
# ലൈബ്രറി vex import ൽ നിന്ന്
ഇറക്കുമതി ചെയ്യുന്നു *
# പ്രോജക്റ്റ് കോഡ് ആരംഭിക്കുക
# മുന്നോട്ട് 10cm
drivetrain.drive_for(FORWARD, 100, MM)
# 1 സെക്കൻഡ് കാത്തിരിക്കുക
കാത്തിരിക്കുക (1, SECONDS)
# ആരംഭ വരിയിലേക്ക് തിരികെ ഡ്രൈവ് ചെയ്യുക
drivetrain.drive_for(REVERSE, 100, MM)
# മുന്നോട്ട് 20cm
drivetrain.drive_for(FORWARD, 200, MM)
# 1 സെക്കൻഡ് കാത്തിരിക്കുക
കാത്തിരിക്കുക (1, SECONDS)
# ആരംഭ വരിയിലേക്ക് തിരികെ ഡ്രൈവ് ചെയ്യുക
drivetrain.drive_for(REVERSE, 200, MM)
# മുന്നോട്ട് 40cm
drivetrain.drive_for(FORWARD, 400, MM)
# 1 സെക്കൻഡ് കാത്തിരിക്കുക
കാത്തിരിക്കുക (1, SECONDS)
# ആരംഭ വരിയിലേക്ക് തിരികെ ഡ്രൈവ് ചെയ്യുക
ഡ്രൈവ്ട്രെയിൻ.ഡ്രൈവ്_ഫോർ(റിവേഴ്സ്, 400, എംഎം)