
บทที่ 4: การท้าทายเขาวงกตกำแพง
ในบทเรียนก่อนหน้านี้ภายในหน่วยนี้คุณได้เรียนรู้วิธีใช้เซ็นเซอร์กันชนเพื่อนำทางไปยังบางพื้นที่ใน Wall Maze Playground ตอนนี้คุณจะรวมแนวคิดทั้งหมดเหล่านี้เพื่อสร้างโครงการเพื่อแก้ปัญหาความท้าทายของ Wall Maze ตั้งแต่ต้นจนจบ!
ผลการเรียนรู้
- ใช้คำสั่งจากหมวดหมู่ Drivetrain, Sensing และ Control ในลำดับที่ถูกต้องเพื่อให้หุ่นยนต์ VR นำทาง Wall Maze Playground ได้สำเร็จ โดยใช้เซ็นเซอร์กันชน
รวมทุกอย่างเข้าด้วยกัน
ลูปขณะ ที่ ไม่มี เงื่อนไข คือลูปที่หยุดการไหลของโครงการ ชั่วคราวจนกว่าเงื่อนไขที่กำหนดจะส่งกลับเป็นจริง การใช้เงื่อนไขและค่าเซ็นเซอร์ในโครงการจะสั่งให้หุ่นยนต์ VR ทำพฤติกรรมที่แตกต่างกันขึ้นอยู่กับค่าเงื่อนไขที่รายงาน
def main ():
while not left_bumper.pressed (): drivetrain.drive
(FORWARD)
wait (5, MSEC
) drivetrain.stop ()การใช้เงื่อนไขและค่าเซ็นเซอร์ช่วยให้หุ่นยนต์ VR ตอบสนองตามสภาพแวดล้อมเช่นการหยุดหรือหมุนเมื่อหุ่นยนต์ VR กดกับผนัง
Wall Maze Challenge
ในความท้าทายนี้ให้สร้างโครงการที่หุ่นยนต์ VR นำทาง Wall Maze Playground ตั้งแต่ต้นจนจบโดยใช้เซ็นเซอร์กันชน
ทำตามขั้นตอนต่อไปนี้เพื่อทำการท้าทายให้เสร็จ:
-
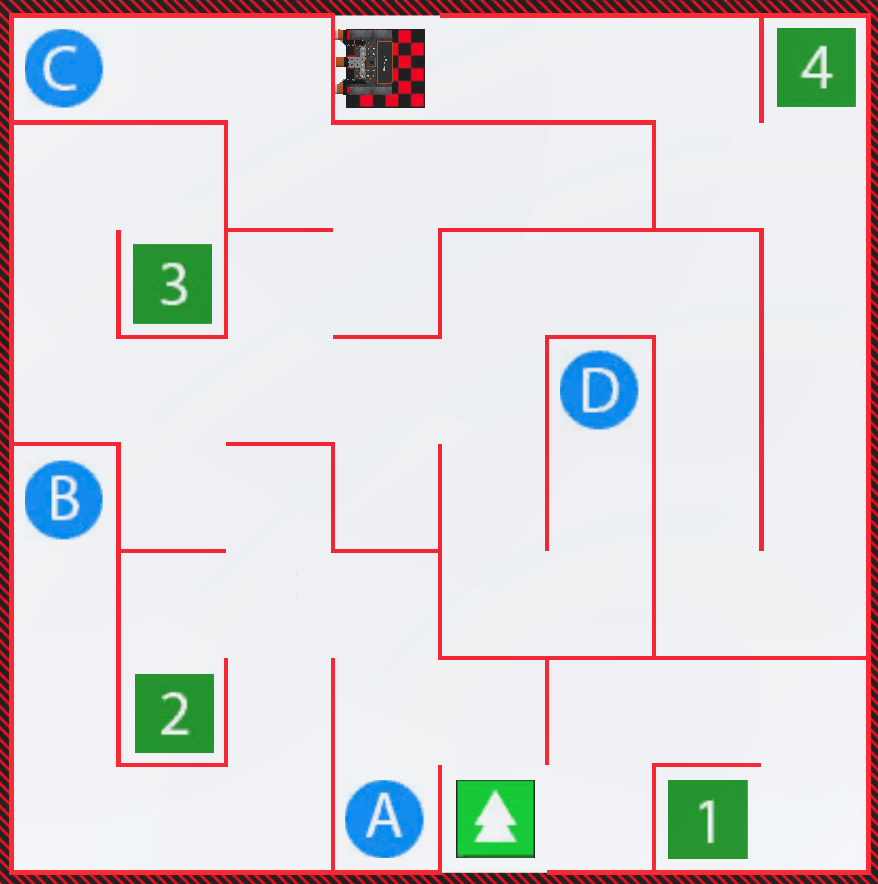
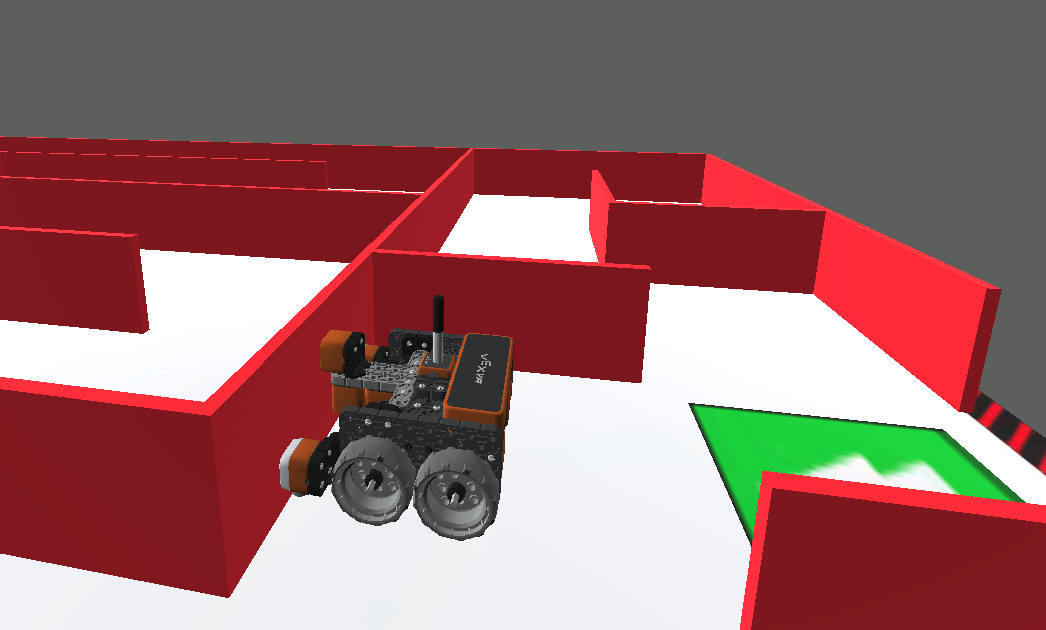
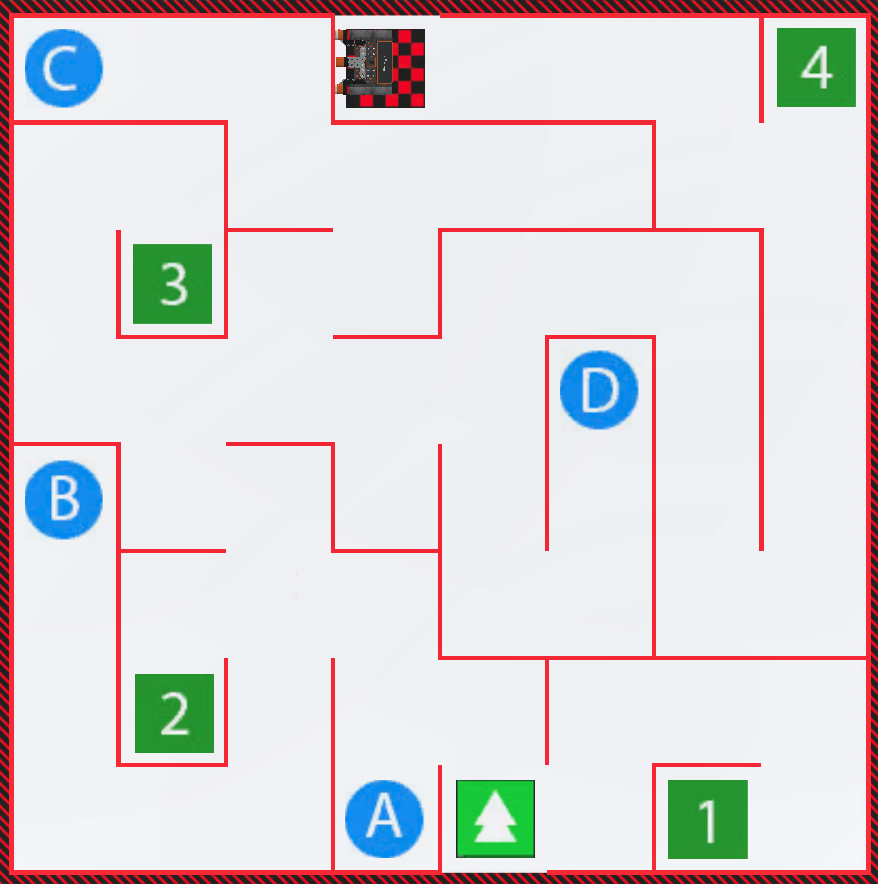
ดูวิดีโอโซลูชันด้านล่างเพื่อดูว่าหุ่นยนต์ VR ควรขับรถอย่างไรเพื่อทำการท้าทายให้สำเร็จ ในคลิปวิดีโอนี้หุ่นยนต์ VR จะนำทางเขาวงกตทั้งหมดด้วยรูปแบบพฤติกรรมเดียวกันในการขับขี่จนกว่ากำแพงจะกดเซ็นเซอร์กันชนจากนั้นจึงหมุน มันเริ่มขับรถตามที่มันทำเพื่อไปถึงหมายเลข 3 ก่อนหน้านี้ เมื่อหุ่นยนต์หันหน้าเข้าหาผนังโดยมีหมายเลข 3 อยู่ด้านหลังหุ่นยนต์จะหันไปทางขวาเพื่อมุ่งหน้าไปทางขวามือของเขาวงกต มันขับไปข้างหน้าไปยังกำแพงล้อมรอบตัวอักษร D หุ่นยนต์นำทางไปทางซ้ายจากนั้นขับไปข้างหน้าและเลี้ยวขวาเพื่ออยู่บนเส้นทางที่ชัดเจน กำแพงถัดไปหุ่นยนต์จะเลี้ยวซ้ายและขับไปข้างหน้าสองครั้งเพื่อไปตามเส้นทางตามกำแพงด้านซ้ายสุด หุ่นยนต์ขับเข้าไปในผนังมุมขวาบนเหนือหมายเลขสี่จากนั้นย้อนกลับ สุดท้ายเลี้ยวซ้ายและขับไปข้างหน้าสองครั้งเพื่อไปถึงเส้นชัย
- สร้างโครงการใหม่หรือโหลดโครงการจากบทเรียนก่อนหน้าในหน่วยนี้ หากสร้างโปรเจกต์ใหม่ให้เลือก Wall Maze Playground เมื่อได้รับแจ้ง
- เปลี่ยนชื่อโครงการ Unit4Challenge
- เปิดหน้าต่างสนามเด็กเล่นหากยังไม่ได้เปิด ให้แน่ใจว่า กำแพงเขาวงกต สนามเด็กเล่น เปิดอยู่
- เพิ่มคำสั่งที่จำเป็นในการนำทาง VR Robot ตั้งแต่ต้นจนจบ Wall Maze
- เริ่มโครงการเพื่อทดสอบว่าได้ผลหรือไม่
- หากโปรเจกต์ไม่สำเร็จให้แก้ไขแล้วลองอีกครั้ง ดำเนินการแก้ไขและเรียกใช้โครงการต่อไปจนกว่าหุ่นยนต์ VR จะขับรถได้สำเร็จตั้งแต่ต้นจนจบ
- บันทึกโครงการเมื่อ VR Robot ประสบความสำเร็จในการขับเคลื่อนจนเสร็จสิ้น
ขอแสดงความยินดี! คุณได้ทำการท้าทาย Wall Maze สำเร็จแล้ว!