
Lezione 4: Sfida labirinto a muro
Nelle lezioni precedenti di questa unità, hai imparato come utilizzare il sensore paraurti per raggiungere determinate aree del Labirinto dei Parco giochi. Ora, combinerai tutti questi concetti per creare un progetto per risolvere la sfida del labirinto a muro dall'inizio alla fine!
Risultati di apprendimento
- Applicare i comandi dalle categorie Trasmissione, Rilevamento e Controllo nella sequenza corretta per far sì che un robot VR possa attraversare con successo il Labirinto Muro Parco giochi utilizzando il sensore paraurti.
Mettere tutto insieme
Il ciclo while con una condizione not è un ciclo che mette in pausa il flusso del progetto finché la condizione specificata non restituisce True. L'utilizzo di condizioni e valori del sensore in un progetto istruisce un robot VR a eseguire comportamenti diversi a seconda dei valori condizionali riportati.
def main():
while not left_bumper.pressed():
drivetrain.drive(FORWARD)
wait(5, MSEC)
drivetrain.stop()L'utilizzo di condizioni e valori del sensore consente al robot VR di rispondere in base al suo ambiente, come l'arresto o la rotazione quando il robot VR preme contro una parete.
Sfida Labirinto a parete
In questa sfida, crea un progetto in cui il robot VR naviga nel Wall Maze Playground dall'inizio alla fine utilizzando il sensore paraurti.
Segui questi passaggi per completare la sfida:
-
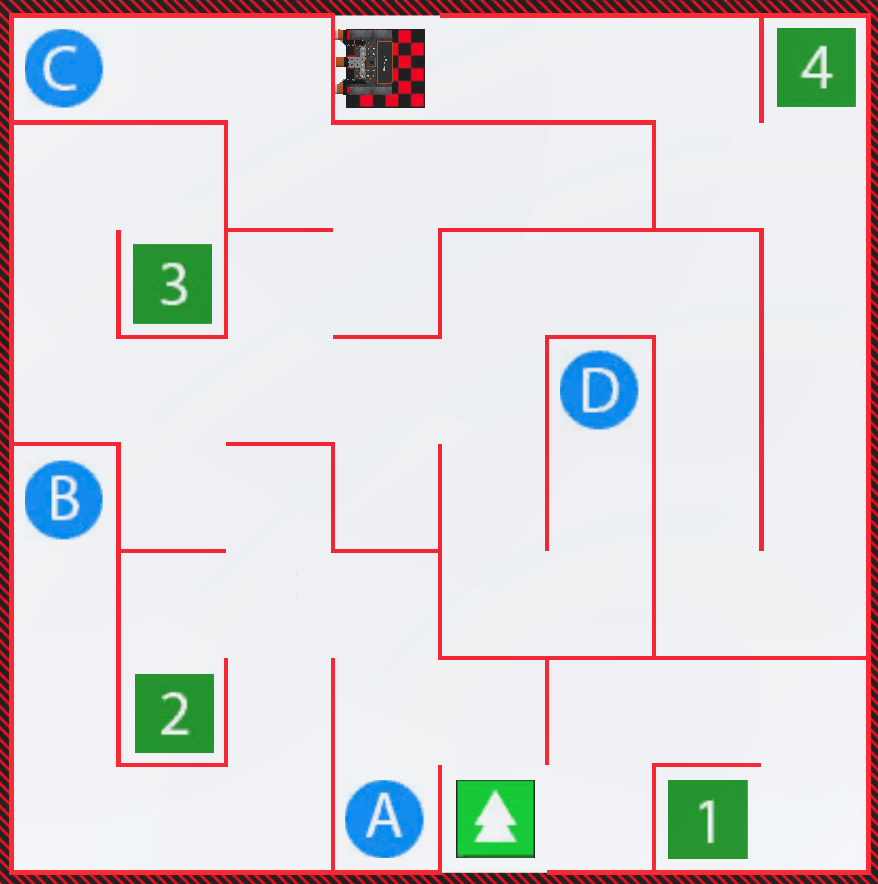
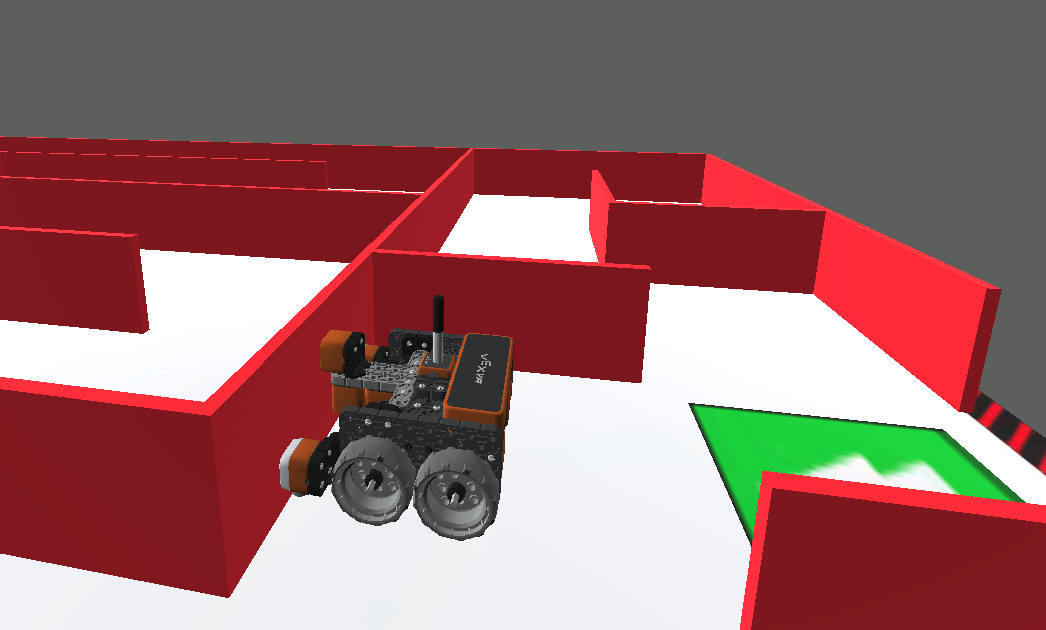
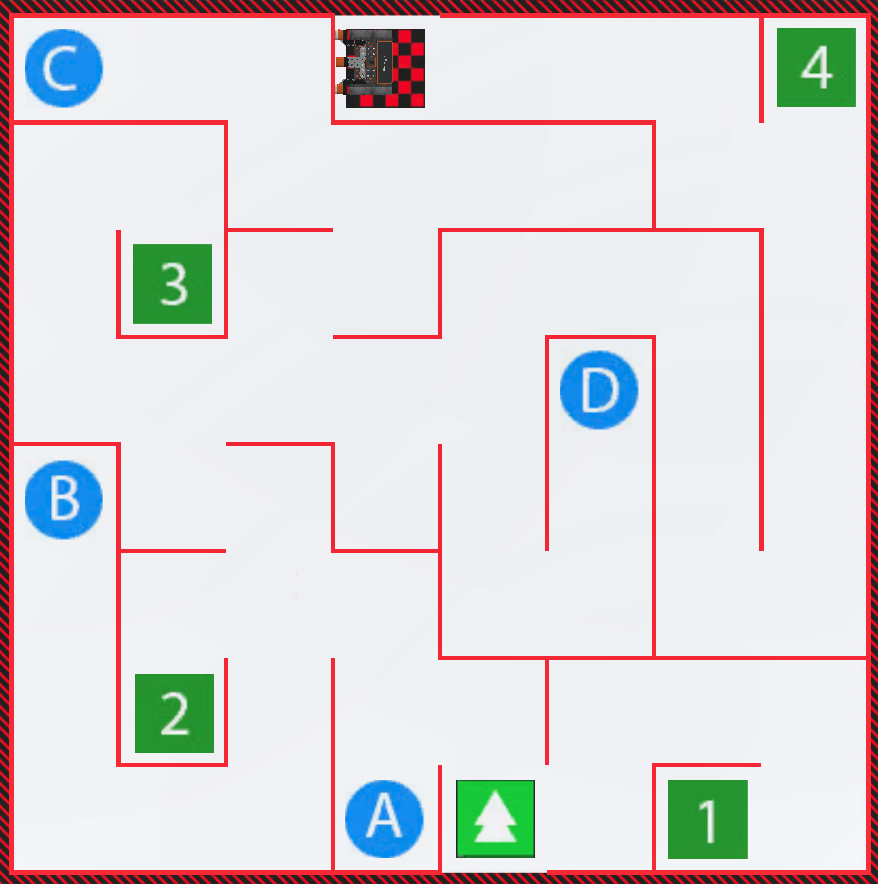
Guarda il video della soluzione qui sotto per vedere come dovrebbe guidare il robot VR per completare la sfida. In questo videoclip, il robot VR percorre l'intero labirinto con lo stesso schema di comportamenti di guida fino a quando il sensore paraurti non viene premuto da una parete, quindi si gira. Inizia a guidare come ha fatto per raggiungere il numero 3 in precedenza. Quando il robot è rivolto verso il muro con il numero 3 dietro di esso, il robot gira a destra per dirigersi verso il lato destro del labirinto. Guida in avanti verso le pareti che circondano la lettera D. Il robot naviga a sinistra, poi guida in avanti e gira a destra per rimanere sul percorso libero. Dopo il muro successivo, il robot gira a sinistra e guida in avanti due volte per seguire il percorso lungo il muro all'estrema sinistra. Il robot entra nella parete dell'angolo in alto a destra sopra il numero quattro, poi fa retromarcia. Infine, gira a sinistra e avanza due volte per raggiungere il traguardo.
- Crea un nuovo progetto o carica un progetto dalle lezioni precedenti in questa unità. Se si crea un nuovo progetto, selezionare Wall Maze Playground quando richiesto.
- Rinominare il progetto Unit4Challenge
- Aprire la finestra Parco giochi se non è già aperta. Assicurati Wall Maze Playground si apra.
- Aggiungere i comandi necessari per navigare nel Robot VR dall'inizio alla fine del Labirinto a Parete.
- Avvia il progetto per verificare se funziona.
- Se il progetto non va a buon fine, modificalo e riprova. Continuare a rivedere ed eseguire il progetto fino a quando il robot VR non guida con successo dall'inizio alla fine.
- Salvare il progetto una volta che il robot VR raggiunge con successo il traguardo.
Congratulazioni! Hai completato con successo la Sfida Labirinto a muro!