
Pratik
Son bölümde Optik Sensörün nasıl çalıştığını ve robotunuzun karar almasını sağlamak için sensörden gelen verileri kodunuzda nasıl kullanabileceğinizi öğrendiniz. Şimdi öğrendiklerinizi bir algoritma oluşturmak için uygulayacak ve Robot Süpürme alıştırma etkinliğini tamamlayacaksınız.
Bu aktivitede robotunuz otonom olarak iki Buckyball'u yükseltilmiş bir alandan itecek ve sürecek. Öğrendiklerinizi Robot Süpürme alıştırma etkinliğini tamamlamak için nasıl uygulayabileceğinizi görmek için aşağıdaki videoyu izleyin.
Şimdi Robot Süpürme alıştırma etkinliğini tamamlama sırası sizde!
Bu animasyonda robot, iki Buckyball'u Saha'dan itmek için otonom bir şekilde hareket ediyor. Robotunuzun Robot Süpürme alıştırma etkinliğini tamamlamak için izleyebileceği olası yollardan birini görmek için bu animasyonu izleyin.
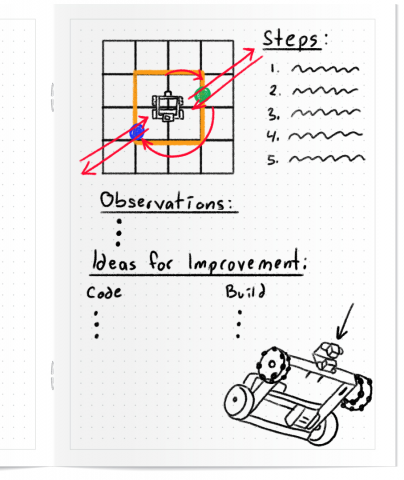
Robot Süpürme alıştırma etkinliğini tamamladığınızda bulgularınızı mühendislik not defterinize yazın.
- Başlamadan önce robotunuzun gerçekleştirmesini istediğiniz davranışları planlayın. Bu adımların oluşturmak istediğiniz kodla nasıl ilişkili olduğunu düşünün.
- Projenizi yürütürken robotun nasıl hareket ettiğine dair notlar alın.
- Kodunuzda ve robotunuzun yapısında yapabileceğiniz iyileştirmeler için bir fikir listesi yapın.
Sonuçlarınızı nasıl kaydedebileceğinize dair bir örnek için bu görseli inceleyin.
Meydan Okumaya Hazırlanın
Yarış'ta (bir sonraki sayfada), robotunuzu yükseltilmiş bir Alandan dört Buckyball'u otonom olarak bulacak ve kaldıracak şekilde kodlayacaksınız. Sweep the Field yarışmasında nasıl yarışacağınızı öğrenmek için aşağıdaki belgeye ve animasyona bakın. Daha sonra Anladığınızı Kontrol Edin Sorularını tamamlayın ve meydan okumaya hazırlanın.
Bu mücadelenin amacı, robotunuzun otonom olarak hareket ederek yükseltilmiş bir alandan dört Buckyball'u en hızlı sürede bulup kaldırmasını sağlamaktır.
Robotunuzun bu meydan okumada nasıl başarılı bir şekilde hareket edebileceğine dair bir örnek görmek için bu animasyonu izleyin.
Bu, robotunuzun Sweep the Field meydan okuma etkinliğini tamamlamak için izleyebileceği olası yollardan sadece biri.
Anlayışınızı Kontrol Edin
Meydan okumaya başlamadan önce, aşağıdaki belgede yer alan soruları mühendislik defterinize yanıtlayarak meydan okumanın kurallarını ve kurulumunu anladığınızdan emin olun.
Anladığınızı Kontrol Edin soruları >
Soruları tamamladıktan sonra, soruyu çözmeye çalışın.
Sweep the Field mücadelesinde yarışmak için Sonraki > seçin.