
Pratique
Dans la dernière section, vous avez appris comment fonctionne le capteur optique et comment vous pouvez utiliser les données du capteur dans votre code pour permettre à votre robot de prendre des décisions. Maintenant, vous allez appliquer ce que vous avez appris pour créer un algorithme et terminer l’activité pratique Robot Sweep.
Dans cette activité, votre robot conduira et poussera de manière autonome deux Buckyballs hors d'un terrain surélevé. Regardez la vidéo ci-dessous pour voir comment vous pouvez appliquer ce que vous avez appris pour terminer l’activité pratique Robot Sweep.
C'est maintenant à votre tour de terminer l'activité pratique Robot Sweep !
Dans cette animation, le robot conduit de manière autonome pour pousser deux Buckyballs hors du terrain. Regardez cette animation pour voir un chemin possible que votre robot pourrait emprunter pour terminer l’activité pratique Robot Sweep.
Suivez les étapes de ce document pour réaliser cette activité.
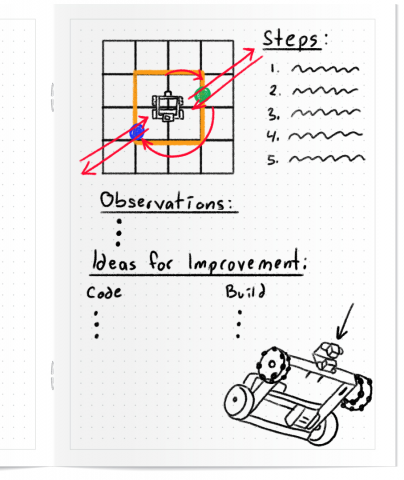
Au fur et à mesure que vous terminez l’activité pratique Robot Sweep , documentez vos découvertes dans votre carnet d’ingénierie.
- Avant de commencer, planifiez les comportements que vous souhaitez que votre robot . Réfléchissez à la manière dont ces étapes se rapportent au que vous souhaitez créer.
- Pendant que vous exécutez votre projet, prenez des notes sur la façon dont le robot se déplace.
- Faites une liste d’idées d’améliorations à apporter à votre code et à la construction de votre robot.
Consultez cette image pour voir un exemple de la manière dont vous pouvez enregistrer vos résultats.
Préparez-vous pour le défi
Dans Compete (sur la page suivante), vous coderez votre robot pour trouver et retirer de manière autonome quatre Buckyballs d'un champ surélevé. Consultez le document et l’animation ci-dessous pour savoir comment participer au défi Sweep the Field. Répondez ensuite aux questions de vérification de votre compréhension et entraînez-vous pour le défi.
Le but de ce défi est de faire en sorte que votre robot se déplace de manière autonome pour trouver et retirer quatre Buckyballs d'un champ surélevé dans le temps le rapide.
Regardez cette animation pour voir un exemple de la façon dont votre robot pourrait se déplacer lors d'une exécution réussie du défi.
Ceci n’est qu’un des chemins possibles que votre robot pourrait emprunter pour terminer l’activité de défi « Balayer le terrain ».
Suivez les étapes de ce document pour en savoir plus sur la façon de réaliser cette activité.
Vérifiez votre compréhension
Avant de commencer le défi, assurez-vous de bien comprendre les règles et la configuration du défi en répondant aux questions du document ci-dessous dans votre cahier d'ingénierie.
Vérifiez vos questions de compréhension >
Après avoir répondu aux questions, essayez de pratiquer le défi.
Sélectionnez Suivant > pour participer au défi Sweep the Field.