
Praxis
Im letzten Abschnitt haben Sie gelernt, wie der optische Sensor funktioniert und wie Sie die Daten des Sensors in Ihrem Code verwenden können, um Ihren Roboter dazu zu bringen, Entscheidungen zu treffen. Jetzt werden Sie das Gelernte anwenden, um einen Algorithmus zu erstellen und die Übungsaktivität Roboter-Sweep abzuschließen.
Bei dieser Aktivität fährt Ihr Roboter autonom und schiebt zwei Buckyballs von einem erhöhten Feld. Sehen Sie sich das Video unten an, um zu sehen, wie Sie das Gelernte anwenden können, um die Übung Robot Sweep abzuschließen.
Jetzt bist du an der Reihe, die Übungsaktivität Robot Sweep abzuschließen!
In dieser Animation fährt der Roboter autonom, um zwei Buckyballs vom Feld zu schieben. Sehen Sie sich diese Animation an, um einen möglichen Weg zu sehen, den Ihr Roboter nehmen könnte, um die Übungsaktivität Robot Sweep abzuschließen.
Befolgen Sie die Schritte in diesem Dokument, um diese Aktivität abzuschließen.
Wenn Sie die Übung Robot Sweep abgeschlossen haben, dokumentieren Sie Ihre Ergebnisse in Ihrem technischen Notizbuch.
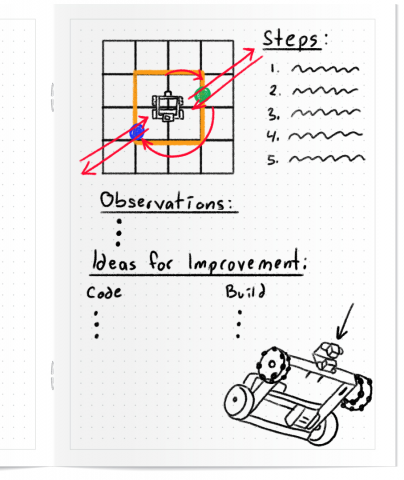
- Bevor Sie beginnen, planen Sie die Verhaltensweisen, die Ihr Roboter ausführen soll. Überlegen Sie, wie sich diese Schritte auf den Code beziehen, den Sie erstellen möchten.
- Machen Sie sich während der Ausführung Ihres Projekts Notizen darüber, wie sich der Roboter bewegt.
- Erstellen Sie eine Liste mit Verbesserungsvorschlägen für Ihren Code und den Build Ihres Roboters.
Sehen Sie sich dieses Bild an, um ein Beispiel dafür zu erhalten, wie Sie Ihre Ergebnisse aufzeichnen können.
Bereiten Sie sich auf die Herausforderung vor
In Compete (auf der nächsten Seite) kodieren Sie Ihren Roboter, um vier Buckyballs autonom aus einem erhöhten Feld zu finden und zu entfernen. Sehen Sie sich das Dokument und die Animation unten an, um zu erfahren, wie Sie an der Sweep the Field-Herausforderung teilnehmen können. Füllen Sie dann die Check Your Understanding Questions aus und üben Sie für die Herausforderung.
Das Ziel dieser Herausforderung ist es, Ihren Roboter autonom fahren zu lassen, um vier Buckyballs in kürzester Zeit aus einem erhöhten Feld zu finden und zu entfernen.
Sehen Sie sich diese Animation an, um ein Beispiel dafür zu sehen, wie sich Ihr Roboter in einem erfolgreichen Lauf der Herausforderung bewegen könnte.
Dies ist nur ein möglicher Weg, den dein Roboter einschlagen könnte, um die Sweep-the-Field-Challenge-Aktivität abzuschließen.
Überprüfe dein Verständnis
Bevor Sie mit der Herausforderung beginnen, stellen Sie sicher, dass Sie die Regeln und den Aufbau der Herausforderung verstehen, indem Sie die Fragen im folgenden Dokument in Ihrem technischen Notizbuch beantworten.
Fragen zu deinem Verständnis prüfen >
Versuchen Sie nach Abschluss der Fragen, die Herausforderung zu üben.
Wähle Weiter aus, > um an der Sweep-the-Field-Herausforderung teilzunehmen.