
Lý lịch
Trong đơn vị mã hóa này, sinh viên sẽ khám phá quy trình thiết kế lặp đi lặp lại. Học sinh sẽ khám phá cách giải quyết vấn đề ô nhiễm đại dương thực sự bằng cách tạo ra một tiện ích mở rộng từ Bộ VEX GO để thu gom rác. Mỗi bài học trong đơn vị này kết thúc bằng việc phân tích điểm mạnh và điểm yếu của bản dựng mở rộng cũng như ý tưởng cải thiện cho thiết kế tiếp theo.
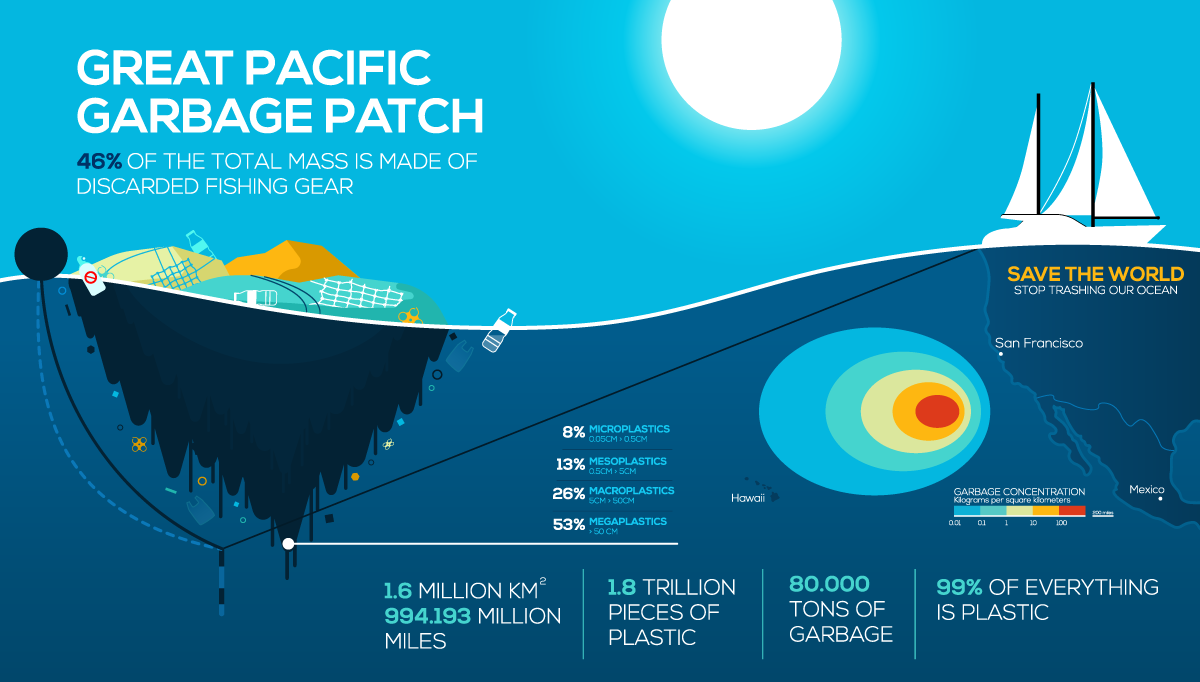
Đảo rác lớn Thái Bình Dương là gì?
Đảo rác Thái Bình Dương là một khối rác thải ngày càng lớn lên mỗi ngày. Mảnh băng trôi này trôi nổi ở đâu đó trên Thái Bình Dương giữa Hawaii và California và ước tính trải dài trên diện tích gấp đôi Texas. Rác thải nổi trong một khối rắn làm từ nhựa, kim loại và các vật liệu khác, cùng với các mảnh vụn rời rạc trôi nổi bên ngoài chu vi. Trong đơn vị này, học sinh được thử thách tạo ra một phần mở rộng cho rô-bốt Code Base của mình để giúp dọn sạch rác thải ở vành đai bãi rác Thái Bình Dương.
Quy trình thiết kế kỹ thuật
Học sinh sẽ sử dụng Quy trình thiết kế kỹ thuật (EDP) để thiết kế và chế tạo phụ kiện cho robot Code Base của mình. EDP là một loạt các bước mà các kỹ sư sử dụng để đưa ra giải pháp cho các vấn đề. Thông thường, giải pháp bao gồm việc thiết kế một sản phẩm đáp ứng các tiêu chí nhất định hoặc hoàn thành một nhiệm vụ nhất định.
EDP có thể được chia thành các bước sau: ĐỊNH NGHĨA → PHÁT TRIỂN GIẢI PHÁP → TỐI ƯU HÓA.
- Xác định các vấn đề kỹ thuật bao gồm việc nêu rõ vấn đề cần giải quyết theo tiêu chí thành công, các ràng buộc hoặc giới hạn.
- Việc thiết kế các giải pháp cho các vấn đề kỹ thuật bắt đầu bằng việc đưa ra một số giải pháp khả thi khác nhau, sau đó đánh giá các giải pháp tiềm năng để xem giải pháp nào đáp ứng tốt nhất các tiêu chí và hạn chế của vấn đề.
- Tối ưu hóa giải pháp thiết kế bao gồm một quá trình trong đó các giải pháp được thử nghiệm và tinh chỉnh một cách có hệ thống và thiết kế cuối cùng được cải thiện bằng cách đánh đổi các tính năng ít quan trọng để lấy các tính năng quan trọng hơn.
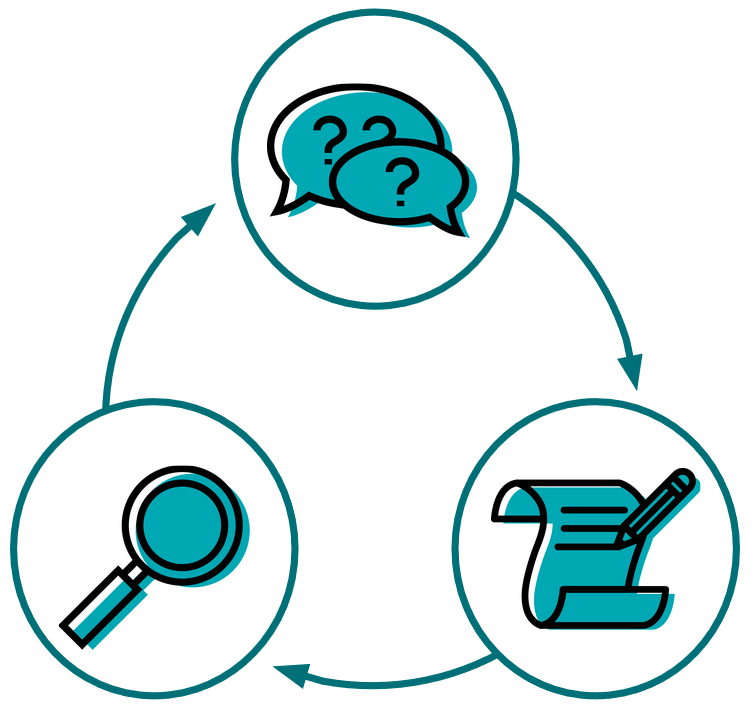
EDP có bản chất tuần hoàn hoặc lặp lại . Đây là quá trình sản xuất, thử nghiệm, phân tích và tinh chỉnh một sản phẩm hoặc quy trình. Dựa trên kết quả thử nghiệm, các phiên bản mới sẽ được tạo ra và tiếp tục được sửa đổi cho đến khi nhóm thiết kế hài lòng với kết quả.
Trong Đơn vị này, học sinh sẽ sử dụng EDP để nghĩ ra, lập kế hoạch và xây dựng một chiếc xe diễu hành. Sau khi xây dựng ban đầu, các nhóm sẽ thử nghiệm và cải thiện thiết kế cơ sở để đáp ứng các tiêu chí và hạn chế thiết kế. Đây là Quy trình thiết kế kỹ thuật tương tự được quy định trong Tiêu chuẩn khoa học thế hệ tiếp theo (NGSS).
Trình tự
Chuỗi là thứ tự cụ thể mà các hành vi được thực hiện. Một hành động hoặc sự kiện dẫn đến hành động tiếp theo theo trình tự. Việc sắp xếp rất quan trọng để học sinh có thể lập trình robot của mình một cách chính xác.
Để chỉ cho robot cách di chuyển chính xác và tỉ mỉ, cần phải có cả phân tích và sắp xếp. Đầu tiên, vấn đề, chẳng hạn như cách di chuyển trong mê cung, sẽ được phân chia thành các phần và hành vi nhỏ hơn. Sau khi xác định được những hành vi này, chúng cần được sắp xếp theo đúng trình tự. Điều này rất quan trọng vì robot sẽ chỉ di chuyển chính xác theo đúng lệnh được lập trình.
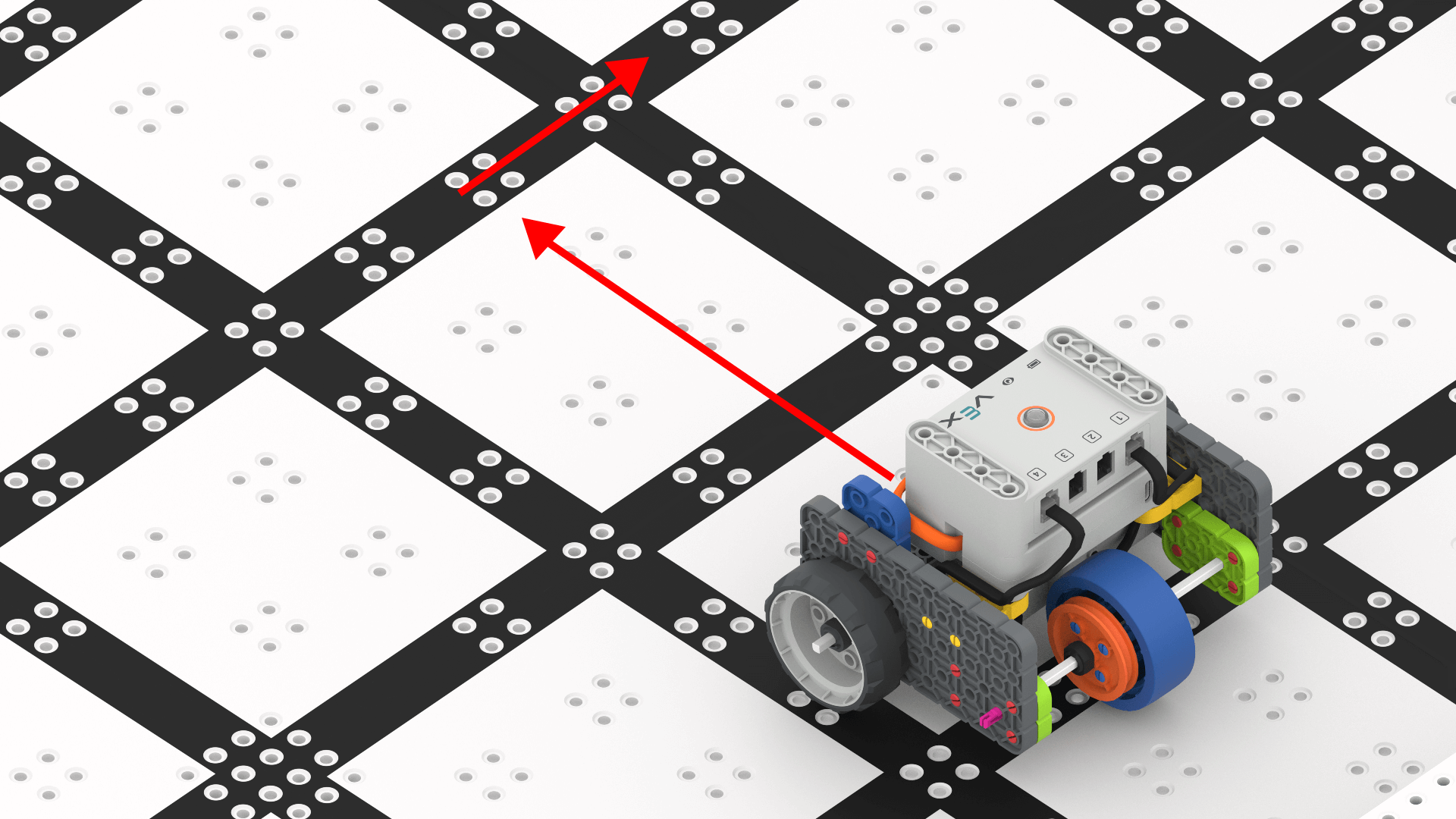
Học sinh sẽ mã hóa Cơ sở mã của mình để di chuyển xung quanh khu vực thử thách và thu thập các vật thể. Họ sẽ cần sắp xếp các lệnh trong dự án của mình sao cho Cơ sở mã của họ di chuyển về phía trước, phía sau, bên trái và bên phải theo đúng thứ tự để điều hướng khu vực thử thách.
- Tiến về phía trước
- Rẽ phải
- Tiến về phía trước
Sự phân hủy
Phân tích bao gồm việc chia nhỏ một vấn đề phức tạp thành các hành vi dễ quản lý và dễ hiểu hơn. Chia nhỏ vấn đề thành các phần nhỏ hơn có nghĩa là mỗi phần có thể được xem xét chi tiết hơn và giải quyết dễ dàng hơn. Ví dụ, nếu một học sinh muốn robot của mình di chuyển theo hình vuông, các em sẽ cần chia nhỏ lệnh đó thành những lệnh nhỏ hơn. Việc tinh chỉnh quá trình phân tích là rất quan trọng để học sinh thực hành, vì lúc đầu các em có thể không chia nhỏ các lệnh thành các thành phần nhỏ hơn:
| Di chuyển theo sự phân tích hình vuông 1 | Di chuyển theo hình vuông phân tích 2 | Di chuyển theo hình vuông phân tích 3 |
|---|---|---|
|
|
|
Mã giả là gì?
Mã giả là ký hiệu viết tắt cho mã hóa, kết hợp mô tả bằng lời nói và văn bản về mã.
Thông thường, học sinh có thể "đoán và kiểm tra" để tìm ra giải pháp. Tuy nhiên, điều này không giúp các em xây dựng được sự hiểu biết khái niệm về lập trình. Việc viết mã giả giúp sinh viên hiểu sâu hơn về lập trình, vượt ra khỏi phạm vi hiểu biết bề nổi để tiến tới hiểu biết mang tính khái niệm hơn. Mã giả yêu cầu sinh viên phải suy nghĩ khái niệm về giải pháp lập trình của mình trước khi bắt đầu lập trình. Giáo viên nên thảo luận về mã giả với học sinh bằng cách hỏi học sinh:
- Họ muốn dự án của mình đạt được mục tiêu gì?
- Bạn sẽ chia nhỏ ý định hoặc mục tiêu của dự án thành những tuyên bố cụ thể ngắn gọn như thế nào?
Trong ví dụ này, nếu học sinh được yêu cầu tạo một mã giả để muốn robot di chuyển về phía trước, phát hiện bức tường, rẽ phải rồi lại di chuyển về phía trước, thì mã giả sẽ như sau:
- Điều khiển robot tiến về phía trước cho đến khi cách tường 50 mm
- Dừng robot lại
- Xoay robot 90 độ
- Dừng robot lại
- Tiến về phía trước 600 mm
Sau khi tạo xong mã giả, học sinh sẽ tạo mã lập trình để hướng dẫn robot cách hoàn thành thành công từng bước trong mã giả của mình.
Hành vi của Robot là gì?
“Hành vi” là cách rất thuận tiện để nói về những gì robot đang làm và những gì nó phải làm. Tiến về phía trước, dừng lại, quay lại, tìm kiếm chướng ngại vật — tất cả đều là hành vi.
Khi học sinh bắt đầu nhiệm vụ lập trình, các em cũng nên bắt đầu suy nghĩ về hành động của robot theo góc độ hành vi. Khi học sinh viết mã, các em nên làm theo các bước sau:
- Xây dựng kế hoạch để robot thực hiện hành động mong muốn.
- Xác định các hành vi trong kế hoạch và cố gắng hạn chế các hành vi đó ở mức tối thiểu có thể.
- Biến kế hoạch đó thành một dự án mà robot có thể thực hiện được.
Kế hoạch chỉ đơn giản là trình tự các hành vi mà robot cần tuân theo và dự án sẽ chỉ là những hành vi đó được dịch sang VEXcode GO.
Chia nhỏ nhiệm vụ thành những hành vi nhỏ hơn rồi xây dựng giải pháp dựa trên những hành vi đó là một kỹ năng có thể áp dụng cho nhiều môn học khác nhau.
VEXcode GO là gì?
VEXcode GO là môi trường lập trình được sử dụng để giao tiếp với robot VEX GO. Học sinh sử dụng giao diện kéo và thả để tạo các dự án VEXcode GO để điều khiển hành động của robot. Mục đích của mỗi khối có thể được xác định bằng các tín hiệu trực quan như hình dạng , màu sắc và nhãn.
Các khối VEXcode GO sau đây sẽ được sử dụng trong Đơn vị này:
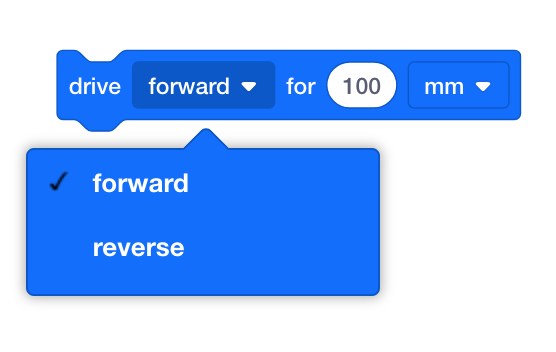
[Lái xe cho] - di chuyển Hệ thống truyền động về phía trước hoặc lùi lại trong một khoảng cách nhất định. Chọn hướng mà Hệ thống truyền động sẽ di chuyển và thiết lập khoảng cách di chuyển bằng cách nhập giá trị vào hình bầu dục.
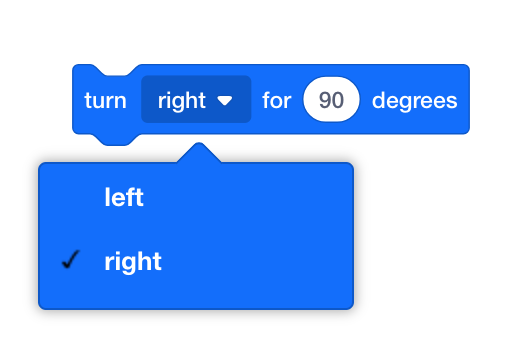
[Xoay] - xoay Hệ thống truyền động sang trái hoặc phải theo một số độ nhất định. Chọn hướng mà hệ thống truyền động sẽ quay và thiết lập khoảng cách mà nó sẽ di chuyển bằng cách nhập số độ vào hình bầu dục.
[Bình luận] - cho phép lập trình viên viết thông tin để giúp mô tả dự án của họ. Bình luận không làm thay đổi dự án hoặc các khối xung quanh dự án.

Để bắt đầu sử dụng VEXcode GO trong lớp học của bạn, hãy tải ứng dụng VEX Classroom về thiết bị của giáo viên, sau đó làm theo các bước trong bài viết Sử dụng ứng dụng VEX Classroom để tìm hiểu cách cập nhật chương trình cơ sở GO Brain, đổi tên và định vị GO Brains cũng như theo dõi Pin của GO Brains trong lớp học của bạn. Để biết thêm thông tin về VEXcode GO, hãy truy cập phần VEXcode GO trong Thư viện VEX.