
พื้นหลัง
ในหน่วยการเขียนโค้ดนี้ นักเรียนจะสำรวจกระบวนการออกแบบซ้ำ นักเรียนจะได้สำรวจวิธีแก้ปัญหาที่แท้จริงของมลพิษในมหาสมุทรด้วยการสร้างส่วนขยายจาก VEX GO Kit ที่จะเก็บขยะ แต่ละบทเรียนในหน่วยนี้จบลงด้วยการวิเคราะห์จุดแข็งและจุดอ่อนของส่วนต่อขยายและแนวคิดในการปรับปรุงสำหรับการออกแบบครั้งต่อไป
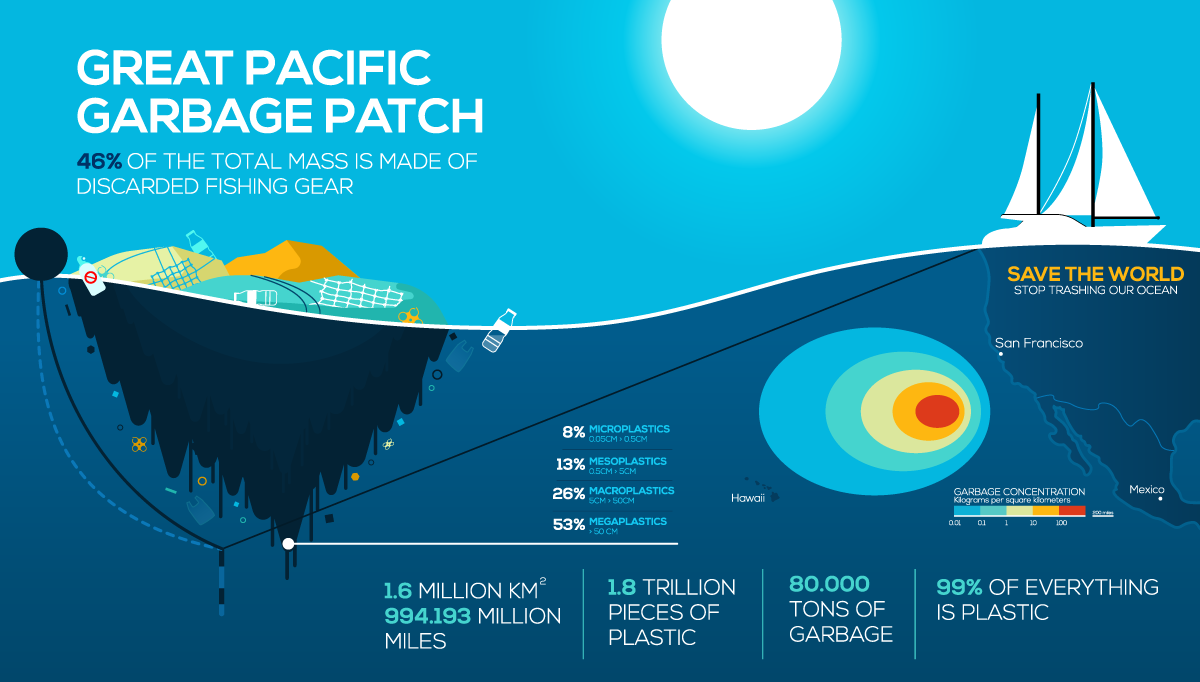
Patch ขยะ Great Pacific คืออะไร?
Great Pacific Garbage Patch คือปริมาณขยะที่เพิ่มขึ้นในแต่ละวัน แผ่นปะนี้ลอยอยู่ที่ไหนสักแห่งในมหาสมุทรแปซิฟิกระหว่างฮาวายและแคลิฟอร์เนีย และคาดว่าจะขยายพื้นที่เป็นสองเท่าของเท็กซัส ขยะจะลอยอยู่ในมวลแข็งก้อนเดียวของพลาสติก โลหะ และวัสดุอื่นๆ โดยมีเศษลอยลอยอยู่เหนือเส้นรอบวง นักเรียนถูกท้าทายในหน่วยนี้ให้สร้างส่วนขยายสำหรับหุ่นยนต์ Code Base ซึ่งจะช่วยกำจัดเศษขยะบริเวณ Great Pacific Garbage Patch
กระบวนการออกแบบทางวิศวกรรม
นักเรียนจะใช้กระบวนการออกแบบทางวิศวกรรม (EDP) เพื่อออกแบบและสร้างเอกสารแนบสำหรับหุ่นยนต์ Code Base ของตน EDP เป็นชุดขั้นตอนที่วิศวกรใช้เพื่อหาแนวทางแก้ไขปัญหา บ่อยครั้ง โซลูชันเกี่ยวข้องกับการออกแบบผลิตภัณฑ์ที่ตรงตามเกณฑ์ที่กำหนดหรือบรรลุผลสำเร็จในงานบางอย่าง
EDP สามารถแบ่งออกเป็นขั้นตอนต่อไปนี้: DEFINE → DEVELOP SOLUTIONS → OPTIMIZE
- การกำหนดปัญหาทางวิศวกรรม เกี่ยวข้องกับการระบุปัญหาที่ต้องแก้ไขให้ชัดเจนที่สุดเท่าที่จะเป็นไปได้ในแง่ของเกณฑ์ความสำเร็จ และข้อจำกัดหรือขีดจำกัด
- การออกแบบวิธีแก้ปัญหาทางวิศวกรรม เริ่มต้นด้วยการสร้างวิธีแก้ปัญหาที่เป็นไปได้จำนวนหนึ่ง จากนั้นประเมินวิธีแก้ปัญหาที่เป็นไปได้เพื่อดูว่าวิธีใดที่ตรงกับเกณฑ์และข้อจำกัดของปัญหามากที่สุด
- การเพิ่มประสิทธิภาพโซลูชันการออกแบบ เกี่ยวข้องกับกระบวนการที่โซลูชันได้รับการทดสอบและปรับปรุงอย่างเป็นระบบ และการออกแบบขั้นสุดท้ายได้รับการปรับปรุงโดยการแลกเปลี่ยนคุณลักษณะที่สำคัญน้อยกว่ากับคุณลักษณะที่มีความสำคัญมากกว่า
EDP เป็นแบบวนซ้ำหรือ ซ้ำ โดยธรรมชาติ เป็นกระบวนการสร้าง ทดสอบ วิเคราะห์ และปรับปรุงผลิตภัณฑ์หรือกระบวนการ จากผลการทดสอบ จะมีการสร้างการวนซ้ำใหม่และทำการแก้ไขต่อไปจนกว่าทีมออกแบบจะพอใจกับผลลัพธ์
ในหน่วยการเรียนรู้นี้ นักเรียนจะใช้ EDP เพื่อฝัน วางแผน และสร้างขบวนแห่ หลังจากการสร้างครั้งแรก กลุ่มต่างๆ จะทดสอบและปรับปรุงการออกแบบฐานของตนเพื่อให้ตรงตามเกณฑ์และข้อจำกัดในการออกแบบ นี่เป็นกระบวนการออกแบบทางวิศวกรรมแบบเดียวกับที่ครอบคลุมโดย Next Generation Science Standards (NGSS)
การเรียงลำดับ
ลำดับที่ คือลำดับเฉพาะในการดำเนินการพฤติกรรม การกระทำหรือเหตุการณ์นำไปสู่การกระทำลำดับถัดไปในลำดับ การจัดลำดับเป็นสิ่งสำคัญเพื่อให้นักเรียนสามารถเขียนโค้ดหุ่นยนต์ได้อย่างถูกต้อง
เพื่อที่จะบอกหุ่นยนต์ได้อย่างแม่นยำและแม่นยำถึงวิธีการเคลื่อนที่ จำเป็นต้องมีทั้งการสลายตัวและการจัดลำดับ ประการแรก ปัญหา เช่น วิธีนำทางในเขาวงกต จะถูกแยกย่อยเป็นส่วนเพิ่มขึ้นและพฤติกรรมที่น้อยลง จากนั้นเมื่อระบุพฤติกรรมเหล่านี้ได้แล้ว จะต้องจัดลำดับพฤติกรรมเหล่านี้ให้ถูกต้อง นี่เป็นสิ่งสำคัญ เนื่องจากหุ่นยนต์จะเคลื่อนที่ตามที่กำหนดไว้เท่านั้น
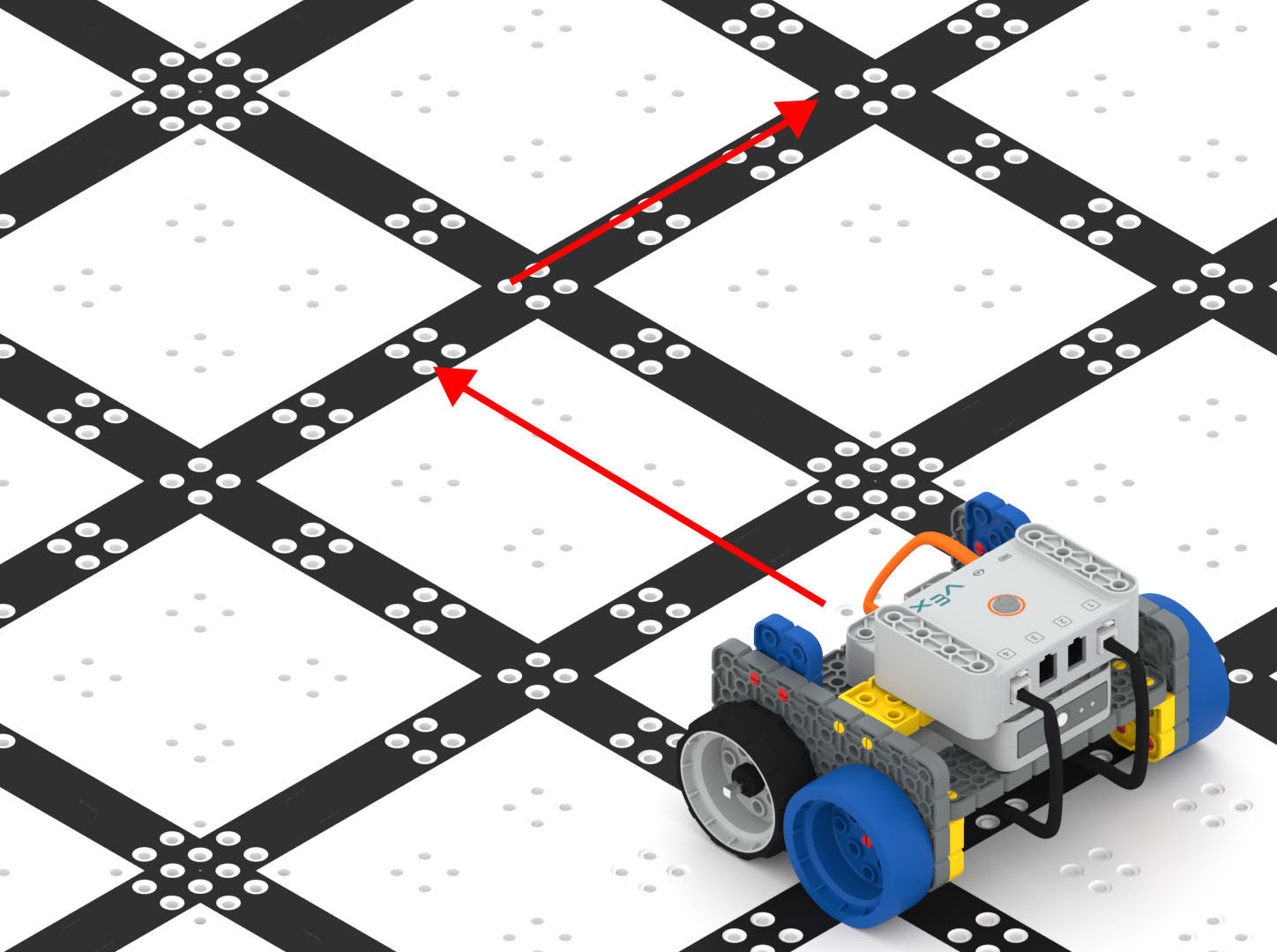
นักเรียนจะเขียนโค้ดฐานโค้ดเพื่อเคลื่อนที่ไปรอบๆ พื้นที่ท้าทายและรวบรวมสิ่งของ พวกเขาจะต้องเรียงลำดับคำสั่งในโครงการเพื่อให้ Code Base เคลื่อนที่ไปข้างหน้า ถอยหลัง ซ้ายและขวาตามลำดับที่ถูกต้องเพื่อนำทางไปยังพื้นที่ท้าทาย
- ก้าวไปข้างหน้า
- เลี้ยวขวา
- ก้าวไปข้างหน้า
การสลายตัว
การสลายตัว เกี่ยวข้องกับการแจกแจงปัญหาที่ซับซ้อนออกเป็นพฤติกรรมที่สามารถจัดการได้ง่ายกว่าและเข้าใจง่ายกว่า การแบ่งปัญหาออกเป็นส่วนเล็กๆ หมายความว่าแต่ละส่วนสามารถตรวจสอบได้ละเอียดยิ่งขึ้น และแก้ไขได้ง่ายขึ้น ตัวอย่างเช่น หากนักเรียนต้องการให้หุ่นยนต์เคลื่อนที่เป็นสี่เหลี่ยม พวกเขาจะต้องแยกย่อยออกเป็นคำสั่งเล็กๆ การปรับปรุงกระบวนการแจกแจงเป็นสิ่งสำคัญสำหรับนักเรียนในการฝึกฝน เนื่องจากพวกเขาอาจไม่แบ่งคำสั่งออกเป็นองค์ประกอบย่อยๆ ในตอนแรก:
| เคลื่อนที่เป็นตารางย่อย 1 | เคลื่อนที่เป็นตารางย่อย 2 | เคลื่อนที่เป็นสี่เหลี่ยมจัตุรัส 3 |
|---|---|---|
|
|
|
ซูโดโค้ดคืออะไร?
Pseudocode คือสัญกรณ์ชวเลขสำหรับการเข้ารหัสที่รวมคำอธิบายของโค้ดทั้งทางวาจาและลายลักษณ์อักษร
บ่อยครั้ง นักเรียนสามารถ "เดาและตรวจสอบ" วิธีการหาวิธีแก้ปัญหาได้ อย่างไรก็ตาม สิ่งนี้ไม่ได้ส่งผลให้พวกเขาสร้างความเข้าใจแนวคิดเกี่ยวกับแนวคิดการเขียนโปรแกรม การเขียนรหัสเทียมช่วยให้นักเรียนก้าวไปไกลกว่าความเข้าใจระดับพื้นผิวของการเขียนโปรแกรม ไปสู่ความเข้าใจแนวความคิดมากขึ้น Pseudocode ต้องการให้นักเรียนคิดตามแนวคิดเกี่ยวกับโซลูชันการเขียนโปรแกรมก่อนที่จะเริ่มเขียนโปรแกรม ครูควรหารือเกี่ยวกับรหัสเทียมกับนักเรียนโดยถามนักเรียนว่า
- พวกเขาต้องการให้โครงการบรรลุผลอะไร?
- คุณจะแจกแจงจุดประสงค์หรือเป้าหมายของโครงการเป็นข้อความสั้นๆ เฉพาะเจาะจงอย่างไร
ในตัวอย่างนี้ หากนักเรียนถูกขอให้สร้างรหัสเทียมเพื่อต้องการให้หุ่นยนต์เคลื่อนที่ไปข้างหน้า ตรวจจับกำแพง เลี้ยวขวา แล้วเคลื่อนที่ไปข้างหน้าอีกครั้ง มันจะเป็นดังต่อไปนี้:
- ขับเคลื่อนหุ่นยนต์ไปข้างหน้าจนกระทั่งอยู่ห่างจากผนัง 50 มม
- หยุดหุ่นยนต์
- หมุนหุ่นยนต์ 90 องศา
- หยุดหุ่นยนต์
- ขับเคลื่อนไปข้างหน้า 600 มม
เมื่อสร้างรหัสเทียมแล้ว นักเรียนจะสร้างรหัสโปรแกรมเพื่อแนะนำหุ่นยนต์เกี่ยวกับวิธีการดำเนินการแต่ละขั้นตอนของรหัสเทียมให้สำเร็จ
พฤติกรรมของหุ่นยนต์คืออะไร?
“พฤติกรรม” เป็นวิธีที่สะดวกมากในการพูดถึงสิ่งที่หุ่นยนต์กำลังทำ และสิ่งที่ต้องทำ ก้าวไปข้างหน้า หยุด หมุน มองหาสิ่งกีดขวาง ล้วนเป็นพฤติกรรม
เมื่อนักเรียนเริ่มเขียนโค้ด พวกเขาควรเริ่มคิดถึงการกระทำของหุ่นยนต์ในแง่ของพฤติกรรมด้วย เมื่อนักเรียนเขียนโค้ด ควรทำตามขั้นตอนเหล่านี้:
- กำหนดแผนสำหรับหุ่นยนต์เพื่อดำเนินการตามที่ต้องการ
- ระบุพฤติกรรมภายในแผนและพยายามทำให้พฤติกรรมมีขนาดเล็กที่สุดเท่าที่จะเป็นไปได้
- แปลแผนดังกล่าวเป็นโครงการที่หุ่นยนต์สามารถปฏิบัติตามได้
แผนจะเป็นเพียงแค่ลำดับของพฤติกรรมที่หุ่นยนต์จำเป็นต้องปฏิบัติตาม และโครงการจะเป็นเพียงแค่พฤติกรรมเหล่านั้นที่แปลเป็น VEXcode GO
การแบ่งงานออกเป็นพฤติกรรมเล็กๆ น้อยๆ แล้วสร้างวิธีแก้ปัญหาด้วยพฤติกรรมเหล่านั้นเป็นทักษะที่สามารถนำไปใช้กับวิชาต่างๆ ได้มากมาย
VEXcode GO คืออะไร?
VEXcode GO เป็นสภาพแวดล้อมการเขียนโค้ดที่ใช้ในการสื่อสารกับหุ่นยนต์ VEX GO นักเรียนใช้อินเทอร์เฟซแบบลากและวางเพื่อสร้างโปรเจ็กต์ VEXcode GO ที่ควบคุมการทำงานของโรบ็อตของตน วัตถุประสงค์ของแต่ละบล็อกสามารถระบุได้โดยใช้ภาพ เช่น รูปทรง สี และป้ายกำกับ
บล็อก VEXcode GO ต่อไปนี้จะถูกนำมาใช้ในหน่วยนี้:
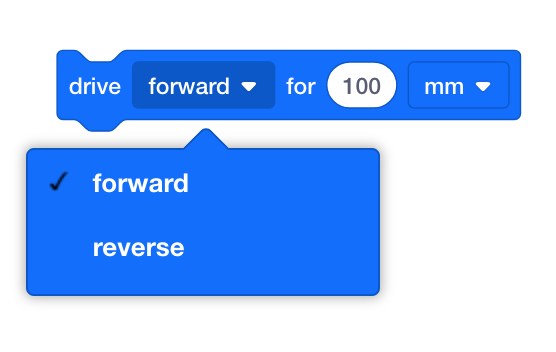
[ขับเคลื่อนเพื่อ] - เลื่อนระบบขับเคลื่อนไปข้างหน้าหรือถอยหลังตามระยะทางที่กำหนด เลือกทิศทางที่ระบบขับเคลื่อนจะเคลื่อนที่ และตั้งค่าว่าจะเคลื่อนที่ไปไกลแค่ไหนโดยป้อนค่าในวงรี
[หมุนเพื่อ] - หมุนระบบขับเคลื่อนไปทางซ้ายหรือขวาตามจำนวนองศาที่กำหนด เลือกทิศทางที่ระบบขับเคลื่อนจะหมุน และตั้งค่าว่าจะเคลื่อนที่ไปไกลแค่ไหนโดยป้อนตัวเลของศาในวงรี
![[เลี้ยวเพื่อ] บล็อก](/stemlabs/sites/default/files/inline-images/Copy%20of%20Turn%20for%20block.png)
[ความคิดเห็น] - อนุญาตให้โปรแกรมเมอร์เขียนข้อมูลเพื่อช่วยอธิบายโครงการของตน ความคิดเห็นไม่เปลี่ยนแปลงโครงการหรือบล็อกโดยรอบ

ในการเริ่มต้นใช้ VEXcode GO ในห้องเรียนของคุณ ให้ดาวน์โหลดแอป VEX Classroom ลงในอุปกรณ์ของครู จากนั้นทำตามขั้นตอนในบทความ การใช้แอป VEX Classroom App เพื่อเรียนรู้วิธีอัปเดตเฟิร์มแวร์ GO Brain เปลี่ยนชื่อและค้นหา GO Brains และ ตรวจสอบแบตเตอรี่ของ GO Brains ในห้องเรียนของคุณ สำหรับข้อมูลเพิ่มเติมเกี่ยวกับ VEXcode GO โปรดไปที่ VEXcode GO ส่วนที่ ของ VEX Library