
Latar belakang
Dalam unit pengkodean ini, siswa akan menjelajahi proses desain berulang. Siswa akan mengeksplorasi cara memecahkan masalah nyata pencemaran laut dengan membuat perluasan dari VEX GO Kit yang akan mengumpulkan sampah. Setiap pelajaran dalam unit ini diakhiri dengan menganalisis kekuatan dan kelemahan pembangunan ekstensi serta ide untuk meningkatkan desain berikutnya.
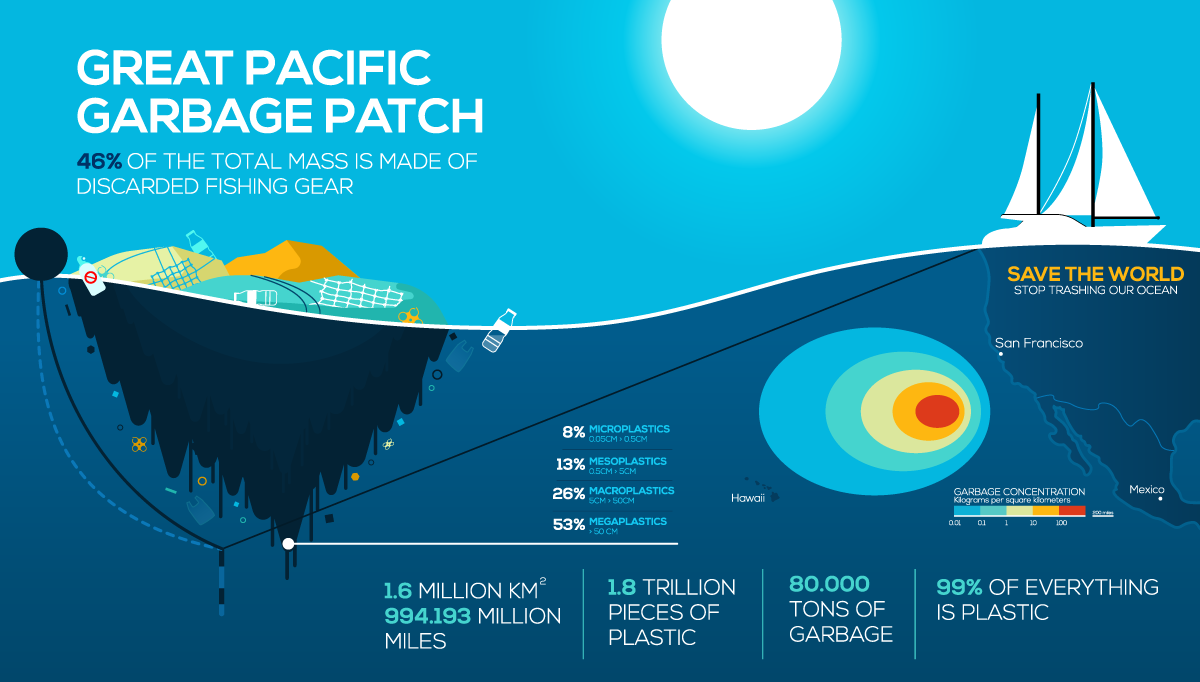
Apa itu Great Pacific Garbage Patch?
Great Pacific Garbage Patch adalah kumpulan sampah yang tumbuh setiap hari. Bercak itu mengapung di suatu tempat di Samudra Pasifik antara Hawaii dan California dan diperkirakan mencakup area dua kali ukuran Texas. Sampah mengapung dalam satu massa padat dari plastik, logam, dan material lain, sedangkan serpihan lepas mengapung di luar batasnya. Siswa ditantang dalam unit ini untuk membuat perluasan bagi robot Basis Kode mereka yang akan membantu membersihkan puing-puing perimeter dari Great Pacific Garbage Patch.
Proses Desain Rekayasa
Siswa akan menggunakan Proses Desain Rekayasa (EDP) untuk merancang dan membangun perlengkapan untuk robot Basis Kode mereka. EDP adalah serangkaian langkah yang digunakan para insinyur untuk menemukan solusi atas suatu masalah. Seringkali, solusinya melibatkan perancangan produk yang memenuhi kriteria tertentu atau menyelesaikan tugas tertentu.
EDP dapat dipecah menjadi beberapa langkah berikut: DEFINE → DEVELOP SOLUTIONS → OPTIMIZE.
- Mendefinisikan masalah teknik melibatkan pernyataan masalah yang akan dipecahkan sejelas mungkin dalam hal kriteria keberhasilan, dan kendala atau batasan.
- Merancang solusi untuk masalah teknik dimulai dengan menghasilkan sejumlah kemungkinan solusi yang berbeda, lalu mengevaluasi solusi potensial untuk melihat mana yang paling memenuhi kriteria dan kendala masalah.
- Mengoptimalkan solusi desain melibatkan proses di mana solusi diuji dan disempurnakan secara sistematis dan desain akhir ditingkatkan dengan mengorbankan fitur yang kurang penting untuk fitur yang lebih penting.
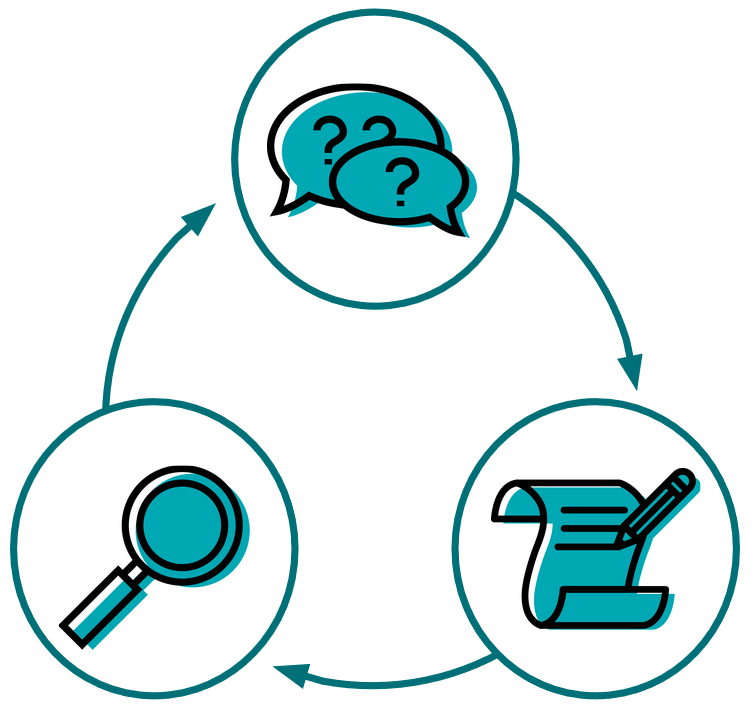
EDP bersifat siklik atau iteratif . Ini adalah proses pembuatan, pengujian dan analisis, serta penyempurnaan suatu produk atau proses. Berdasarkan hasil pengujian, iterasi baru dibuat, dan terus dimodifikasi hingga tim desain puas dengan hasilnya.
Dalam Unit ini, siswa akan menggunakan EDP untuk memimpikan, merencanakan, dan membangun kendaraan hias parade. Setelah pembangunan awal, kelompok akan menguji dan meningkatkan desain dasar mereka untuk memenuhi kriteria dan batasan desain. Ini adalah Proses Desain Rekayasa yang sama yang dicakup oleh Standar Sains Generasi Berikutnya (NGSS).
Pengurutan
Urutan adalah urutan spesifik di mana perilaku dilakukan. Suatu tindakan atau kejadian mengarah ke tindakan berikutnya yang berurutan. Pengurutan penting agar siswa dapat mengodekan robot mereka dengan benar.
Untuk memberi tahu robot secara tepat dan akurat cara bergerak, diperlukan dekomposisi dan pengurutan. Pertama, masalahnya, seperti cara menavigasi labirin, akan diurai menjadi bagian-bagian dan perilaku yang lebih kecil. Kemudian, setelah perilaku ini diidentifikasi, perilaku tersebut perlu diatur ke dalam urutan yang benar. Hal ini penting, karena robot hanya akan bergerak sesuai kode yang diberikan.
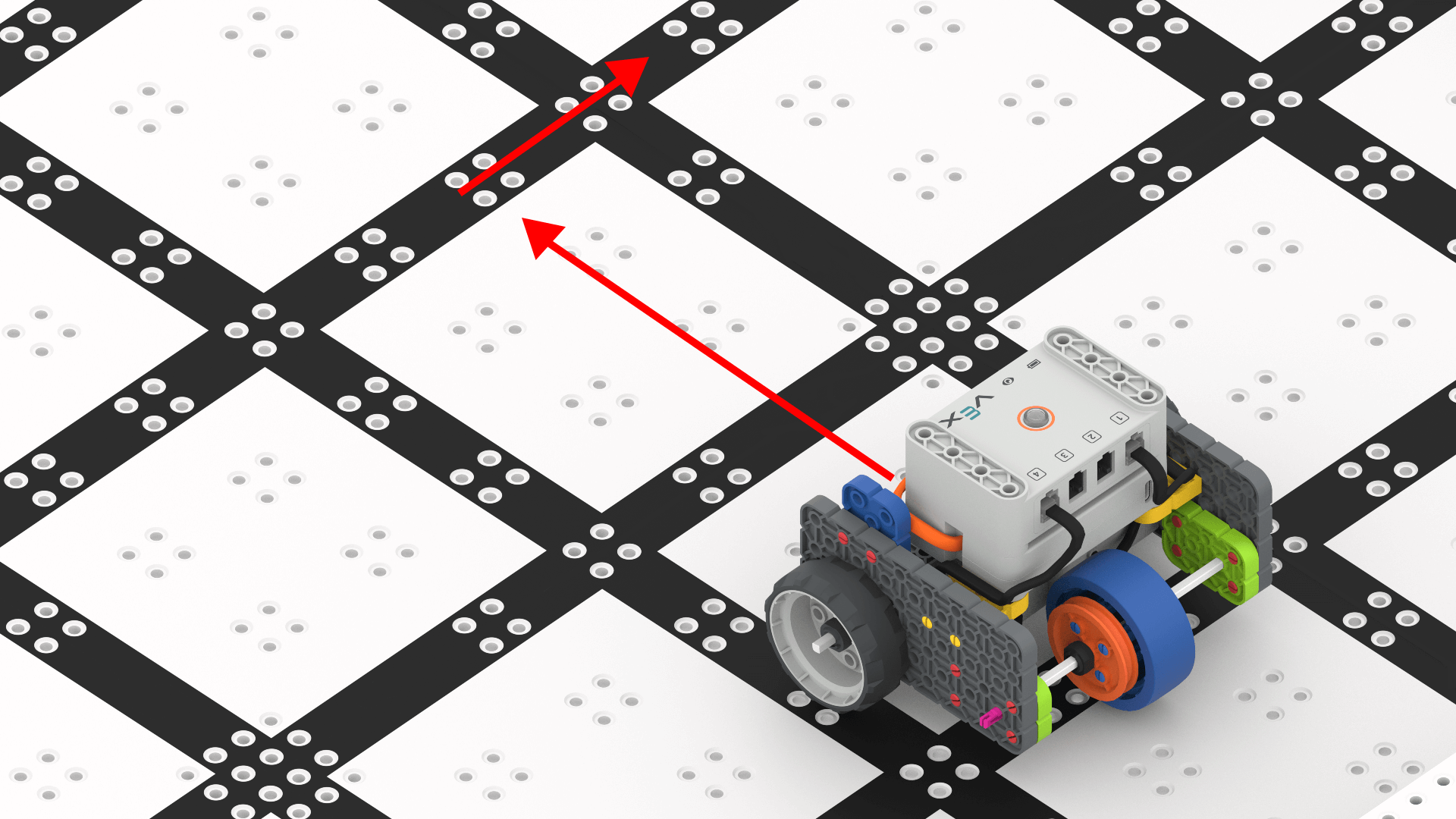
Siswa akan membuat kode Basis Kode mereka untuk bergerak di sekitar area tantangan dan mengumpulkan objek. Mereka perlu mengurutkan perintah dalam proyek mereka sehingga Basis Kode mereka bergerak maju, mundur, kiri, dan kanan dalam urutan yang benar untuk menavigasi area tantangan.
- Bergerak maju
- Belok kanan
- Bergerak maju
Penguraian
Dekomposisi melibatkan pemecahan masalah kompleks menjadi perilaku yang lebih mudah dikelola dan dipahami. Memecah masalah menjadi bagian-bagian yang lebih kecil berarti setiap bagian dapat diperiksa lebih rinci dan dipecahkan dengan lebih mudah. Misalnya, jika seorang siswa ingin robotnya bergerak dalam kotak, mereka perlu memecahnya menjadi perintah-perintah yang lebih kecil. Penyempurnaan proses pemecahan penting untuk dipraktikkan oleh siswa, karena mereka mungkin tidak memecah perintah menjadi komponen yang lebih kecil pada awalnya:
| Bergerak dalam rincian persegi 1 | Bergerak dalam rincian persegi 2 | Bergerak dalam rincian persegi 3 |
|---|---|---|
|
|
|
Apa itu Pseudocode?
Pseudocode adalah notasi singkat untuk pengkodean yang menggabungkan deskripsi kode lisan dan tertulis.
Seringkali, siswa dapat "menebak dan memeriksa" cara mereka untuk menemukan solusi. Akan tetapi, hal ini tidak mengakibatkan mereka membangun pemahaman konseptual tentang konsep pemrograman. Penulisan pseudocode membantu siswa untuk bergerak melampaui pemahaman pemrograman tingkat permukaan, menuju pemahaman yang lebih konseptual. Pseudocode mengharuskan siswa untuk berpikir secara konseptual tentang solusi pemrograman mereka sebelum mereka memulai pemrograman. Guru harus mendiskusikan pseudocode dengan siswa dengan menanyakan kepada siswa:
- Apa yang ingin mereka capai dari proyek mereka?
- Bagaimana Anda akan menjabarkan maksud dan tujuan proyek ke dalam pernyataan singkat dan spesifik?
Dalam contoh ini, jika siswa diminta membuat pseudocode agar robot bergerak maju, mendeteksi dinding, berbelok ke kanan, lalu bergerak maju lagi, maka pseudocode-nya adalah sebagai berikut:
- Dorong robot ke depan hingga berjarak 50 mm dari dinding
- Hentikan robotnya
- Putar robot 90 derajat
- Hentikan robotnya
- Dorong maju 600 mm
Setelah pseudocode dibuat, siswa kemudian akan membuat kode pemrograman untuk memberi instruksi kepada robot tentang cara menyelesaikan setiap langkah pseudocode mereka dengan sukses.
Apa itu Perilaku Robot?
“Perilaku” adalah cara yang sangat mudah untuk membicarakan apa yang dilakukan robot, dan apa yang harus dilakukannya. Bergerak maju, berhenti, berbelok, mencari rintangan — ini semua adalah perilaku.
Saat siswa memulai tugas pengkodean, mereka juga harus mulai memikirkan tindakan robot dalam hal perilaku. Saat siswa membuat kode, mereka harus mengikuti langkah-langkah berikut:
- Merumuskan rencana agar robot dapat melakukan tindakan yang diinginkan.
- Identifikasi perilaku dalam rencana dan usahakan untuk membuat perilaku tersebut sekecil mungkin.
- Terjemahkan rencana itu ke dalam proyek yang dapat diikuti oleh robot.
Rencananya hanyalah serangkaian perilaku yang harus diikuti robot, dan proyek tersebut hanyalah perilaku-perilaku yang diterjemahkan ke dalam VEXcode GO.
Memecah tugas menjadi perilaku yang lebih kecil dan kemudian membangun solusi dengan perilaku tersebut adalah keterampilan yang dapat diterapkan pada banyak subjek yang berbeda.
Apa itu VEXcode GO?
VEXcode GO adalah lingkungan pengkodean yang digunakan untuk berkomunikasi dengan robot VEX GO. Siswa menggunakan antarmuka seret dan lepas untuk membuat proyek VEXcode GO yang mengendalikan tindakan robot mereka. Tujuan setiap blok dapat diidentifikasi menggunakan isyarat visual seperti bentuk , warna, dan labelnya.
Blok VEXcode GO berikut akan digunakan dalam Unit ini:
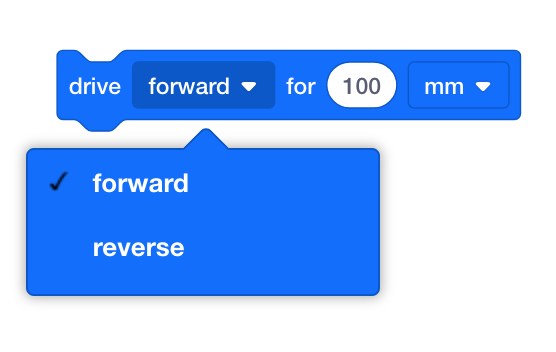
[Berkendara selama] - menggerakkan Drivetrain maju atau mundur untuk jarak tertentu. Pilih arah pergerakan Drivetrain, dan atur seberapa jauh pergerakannya dengan memasukkan nilai pada oval.
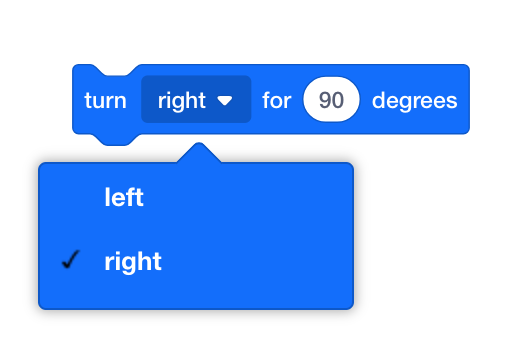
[Putar selama] - memutar Drivetrain ke kiri atau kanan untuk sejumlah derajat tertentu. Pilih arah putaran Drivetrain, dan atur seberapa jauh pergerakannya dengan memasukkan sejumlah derajat pada oval.
[Komentar] - memungkinkan programmer untuk menulis informasi untuk membantu mendeskripsikan proyek mereka. Komentar tidak mengubah proyek atau blok di sekitarnya.

Untuk mulai menggunakan VEXcode GO di kelas Anda, unduh Aplikasi Kelas VEX ke perangkat guru, lalu ikuti langkah-langkah dalam artikel Menggunakan Aplikasi Kelas VEX untuk mempelajari cara memperbarui firmware GO Brain, mengganti nama dan menemukan GO Brains, dan memantau Baterai GO Brains di kelas Anda. Untuk informasi lebih lanjut tentang VEXcode GO, kunjungi GO di Pustaka VEX.