
പശ്ചാത്തലം
ഈ കോഡിംഗ് യൂണിറ്റിൽ, വിദ്യാർത്ഥികൾ ആവർത്തന രൂപകൽപ്പന പ്രക്രിയ പര്യവേക്ഷണം ചെയ്യും. മാലിന്യം ശേഖരിക്കുന്ന VEX GO കിറ്റിൽ നിന്ന് ഒരു വിപുലീകരണം സൃഷ്ടിച്ചുകൊണ്ട് സമുദ്ര മലിനീകരണത്തിന്റെ യഥാർത്ഥ പ്രശ്നം എങ്ങനെ പരിഹരിക്കാമെന്ന് വിദ്യാർത്ഥികൾ പര്യവേക്ഷണം ചെയ്യും. ഈ യൂണിറ്റിലെ ഓരോ പാഠവും അവസാനിക്കുന്നത് എക്സ്റ്റൻഷൻ ബിൽഡിന്റെ ശക്തിയും ബലഹീനതയും വിശകലനം ചെയ്തുകൊണ്ടും അവയുടെ അടുത്ത രൂപകൽപ്പന മെച്ചപ്പെടുത്തുന്നതിനുള്ള ആശയങ്ങൾ വിശകലനം ചെയ്തുകൊണ്ടുമാണ്.
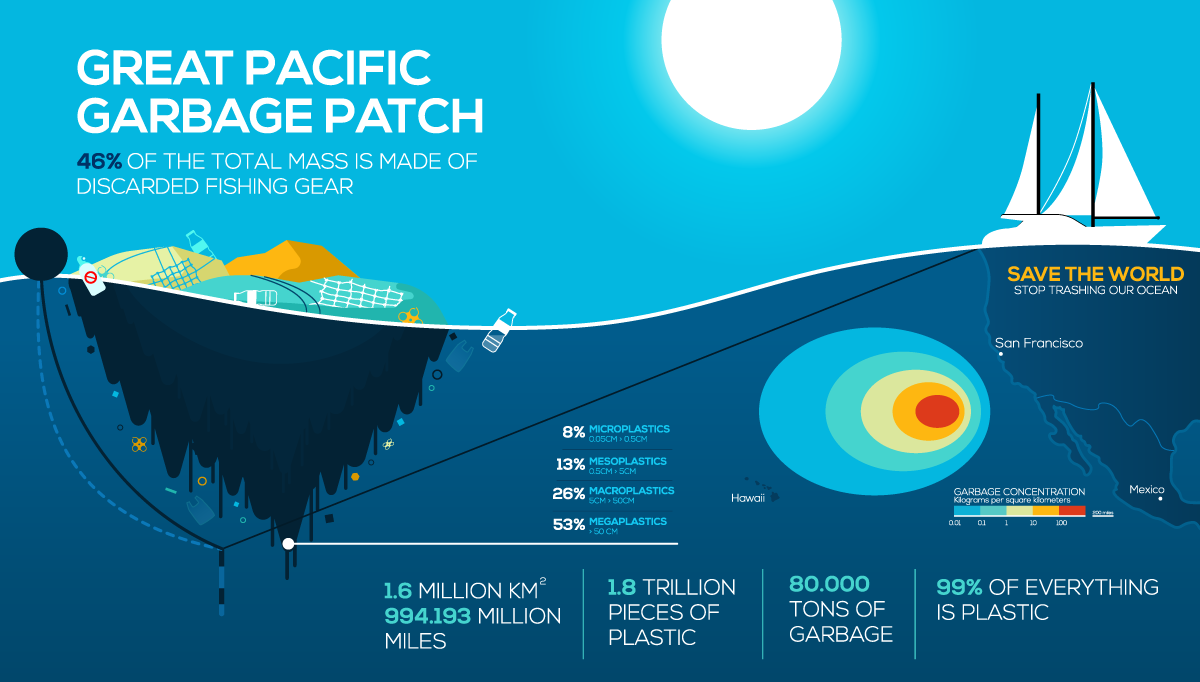
ഗ്രേറ്റ് പസഫിക് മാലിന്യ പാച്ച് എന്താണ്?
ഗ്രേറ്റ് പസഫിക് മാലിന്യ പാച്ച് എന്നത് ദിനംപ്രതി വളരുന്ന മാലിന്യക്കൂമ്പാരമാണ്. പസഫിക് സമുദ്രത്തിൽ ഹവായിക്കും കാലിഫോർണിയയ്ക്കും ഇടയിലുള്ളിടത്ത് ഈ പാച്ച് പൊങ്ങിക്കിടക്കുന്നു, ടെക്സസിന്റെ ഇരട്ടി വലിപ്പമുള്ള വിസ്തൃതിയിൽ ഇത് വ്യാപിച്ചുകിടക്കുമെന്ന് കണക്കാക്കപ്പെടുന്നു. ചുറ്റളവിനപ്പുറം പൊങ്ങിക്കിടക്കുന്ന അയഞ്ഞ അവശിഷ്ടങ്ങളോടൊപ്പം, പ്ലാസ്റ്റിക്, ലോഹം, മറ്റ് വസ്തുക്കൾ എന്നിവയുടെ ഒരു ഖര പിണ്ഡത്തിൽ മാലിന്യം പൊങ്ങിക്കിടക്കുന്നു. ഗ്രേറ്റ് പസഫിക് മാലിന്യ പാച്ചിൽ നിന്ന് ചുറ്റളവിലുള്ള അവശിഷ്ടങ്ങൾ നീക്കം ചെയ്യാൻ സഹായിക്കുന്ന ഒരു കോഡ് ബേസ് റോബോട്ടിനായി ഒരു എക്സ്റ്റൻഷൻ സൃഷ്ടിക്കാൻ ഈ യൂണിറ്റിലെ വിദ്യാർത്ഥികളെ വെല്ലുവിളിക്കുന്നു.
എഞ്ചിനീയറിംഗ് ഡിസൈൻ പ്രക്രിയ
കോഡ് ബേസ് റോബോട്ടിനായി ഒരു അറ്റാച്ച്മെന്റ് രൂപകൽപ്പന ചെയ്യുന്നതിനും നിർമ്മിക്കുന്നതിനും വിദ്യാർത്ഥികൾ എഞ്ചിനീയറിംഗ് ഡിസൈൻ പ്രോസസ് (EDP) ഉപയോഗിക്കും. പ്രശ്നങ്ങൾക്ക് പരിഹാരങ്ങൾ കണ്ടെത്തുന്നതിന് എഞ്ചിനീയർമാർ ഉപയോഗിക്കുന്ന ഘട്ടങ്ങളുടെ ഒരു പരമ്പരയാണ് EDP. പലപ്പോഴും, പരിഹാരത്തിൽ ചില മാനദണ്ഡങ്ങൾ പാലിക്കുന്നതോ ഒരു പ്രത്യേക ജോലി നിർവഹിക്കുന്നതോ ആയ ഒരു ഉൽപ്പന്നം രൂപകൽപ്പന ചെയ്യുന്നത് ഉൾപ്പെടുന്നു.
EDP യെ ഇനിപ്പറയുന്ന ഘട്ടങ്ങളായി തിരിക്കാം: നിർവചിക്കുക → പരിഹാരങ്ങൾ വികസിപ്പിക്കുക → ഒപ്റ്റിമൈസ് ചെയ്യുക.
- എഞ്ചിനീയറിംഗ് പ്രശ്നങ്ങൾ നിർവചിക്കുന്നതിൽ വിജയത്തിനുള്ള മാനദണ്ഡങ്ങളുടെയും പരിമിതികളുടെയും അല്ലെങ്കിൽ പരിമിതികളുടെയും അടിസ്ഥാനത്തിൽ പരിഹരിക്കേണ്ട പ്രശ്നം കഴിയുന്നത്ര വ്യക്തമായി പ്രസ്താവിക്കുന്നത് ഉൾപ്പെടുന്നു.
- എഞ്ചിനീയറിംഗ് പ്രശ്നങ്ങൾക്കുള്ള പരിഹാരങ്ങൾ രൂപകൽപ്പന ചെയ്യുന്നത് ആരംഭിക്കുന്നത് നിരവധി വ്യത്യസ്ത സാധ്യമായ പരിഹാരങ്ങൾ സൃഷ്ടിക്കുന്നതിലൂടെയാണ്, തുടർന്ന് പ്രശ്നത്തിന്റെ മാനദണ്ഡങ്ങളും പരിമിതികളും ഏറ്റവും നന്നായി നിറവേറ്റുന്നവ ഏതെന്ന് കാണാൻ സാധ്യതയുള്ള പരിഹാരങ്ങൾ വിലയിരുത്തുന്നതിലൂടെയാണ്.
- ഡിസൈൻ പരിഹാരം ഒപ്റ്റിമൈസ് ചെയ്യുന്നതിൽ പരിഹാരങ്ങൾ വ്യവസ്ഥാപിതമായി പരീക്ഷിക്കുകയും പരിഷ്കരിക്കുകയും ചെയ്യുന്ന ഒരു പ്രക്രിയ ഉൾപ്പെടുന്നു, കൂടാതെ കൂടുതൽ പ്രാധാന്യമുള്ളവയ്ക്ക് പകരം പ്രാധാന്യം കുറഞ്ഞ സവിശേഷതകൾ മാറ്റിവെച്ച് അന്തിമ രൂപകൽപ്പന മെച്ചപ്പെടുത്തുകയും ചെയ്യുന്നു.
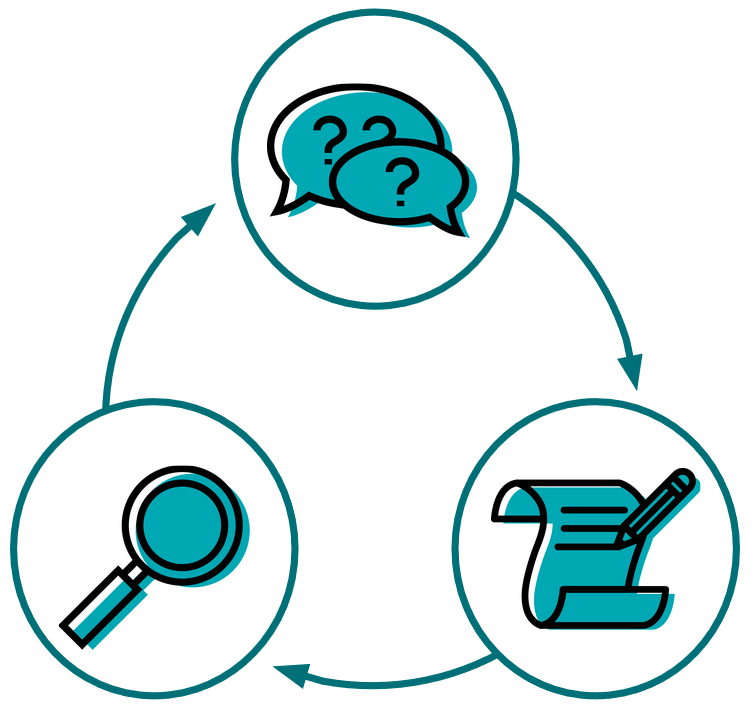
EDP ചാക്രികമോ സ്വഭാവമുള്ളതോ ആണ്. ഒരു ഉൽപ്പന്നം അല്ലെങ്കിൽ പ്രക്രിയ നിർമ്മിക്കുന്നതിനും, പരിശോധിക്കുന്നതിനും, വിശകലനം ചെയ്യുന്നതിനും, പരിഷ്കരിക്കുന്നതിനുമുള്ള ഒരു പ്രക്രിയയാണിത്. പരിശോധനാ ഫലങ്ങളെ അടിസ്ഥാനമാക്കി, പുതിയ ആവർത്തനങ്ങൾ സൃഷ്ടിക്കുകയും, ഡിസൈൻ ടീം ഫലങ്ങളിൽ തൃപ്തരാകുന്നതുവരെ പരിഷ്കരിക്കുകയും ചെയ്യുന്നു.
ഈ യൂണിറ്റിൽ, വിദ്യാർത്ഥികൾ സ്വപ്നം കാണാനും, ആസൂത്രണം ചെയ്യാനും, ഒരു പരേഡ് ഫ്ലോട്ട് നിർമ്മിക്കാനും EDP ഉപയോഗിക്കും. പ്രാരംഭ നിർമ്മാണത്തിനുശേഷം, ഡിസൈൻ മാനദണ്ഡങ്ങളും പരിമിതികളും നിറവേറ്റുന്നതിനായി ഗ്രൂപ്പുകൾ അവരുടെ അടിസ്ഥാന രൂപകൽപ്പന പരിശോധിക്കുകയും മെച്ചപ്പെടുത്തുകയും ചെയ്യും. നെക്സ്റ്റ് ജനറേഷൻ സയൻസ് സ്റ്റാൻഡേർഡ്സ് (NGSS) ഉൾക്കൊള്ളുന്ന അതേ എഞ്ചിനീയറിംഗ് ഡിസൈൻ പ്രക്രിയയാണിത്.
ക്രമപ്പെടുത്തൽ
അനുക്രമം എന്നത് പെരുമാറ്റങ്ങൾ നിർവ്വഹിക്കുന്ന നിർദ്ദിഷ്ട ക്രമമാണ്. ഒരു പ്രവൃത്തിയോ സംഭവമോ ഒരു ക്രമത്തിൽ അടുത്ത ക്രമീകൃത പ്രവർത്തനത്തിലേക്ക് നയിക്കുന്നു. വിദ്യാർത്ഥികൾക്ക് അവരുടെ റോബോട്ടുകളെ ശരിയായി കോഡ് ചെയ്യാൻ കഴിയുന്ന തരത്തിൽ ക്രമപ്പെടുത്തൽ പ്രധാനമാണ്.
ഒരു റോബോട്ടിനെ എങ്ങനെ ചലിപ്പിക്കണമെന്ന് കൃത്യമായും കൃത്യമായും പറയുന്നതിന്, വിഘടനവും ക്രമവും ആവശ്യമാണ്. ആദ്യം, ഒരു മസിലിലൂടെ എങ്ങനെ സഞ്ചരിക്കാം എന്നതുപോലുള്ള പ്രശ്നം, ചെറിയ ഘട്ടങ്ങളായും പെരുമാറ്റങ്ങളായും വിഘടിപ്പിക്കപ്പെടും. പിന്നെ, ഈ സ്വഭാവരീതികൾ തിരിച്ചറിഞ്ഞുകഴിഞ്ഞാൽ, അവയെ ശരിയായ ക്രമത്തിൽ ക്രമീകരിക്കേണ്ടതുണ്ട്. ഇത് പ്രധാനമാണ്, കാരണം റോബോട്ട് കോഡ് ചെയ്തിരിക്കുന്നതുപോലെ മാത്രമേ നീങ്ങുകയുള്ളൂ.
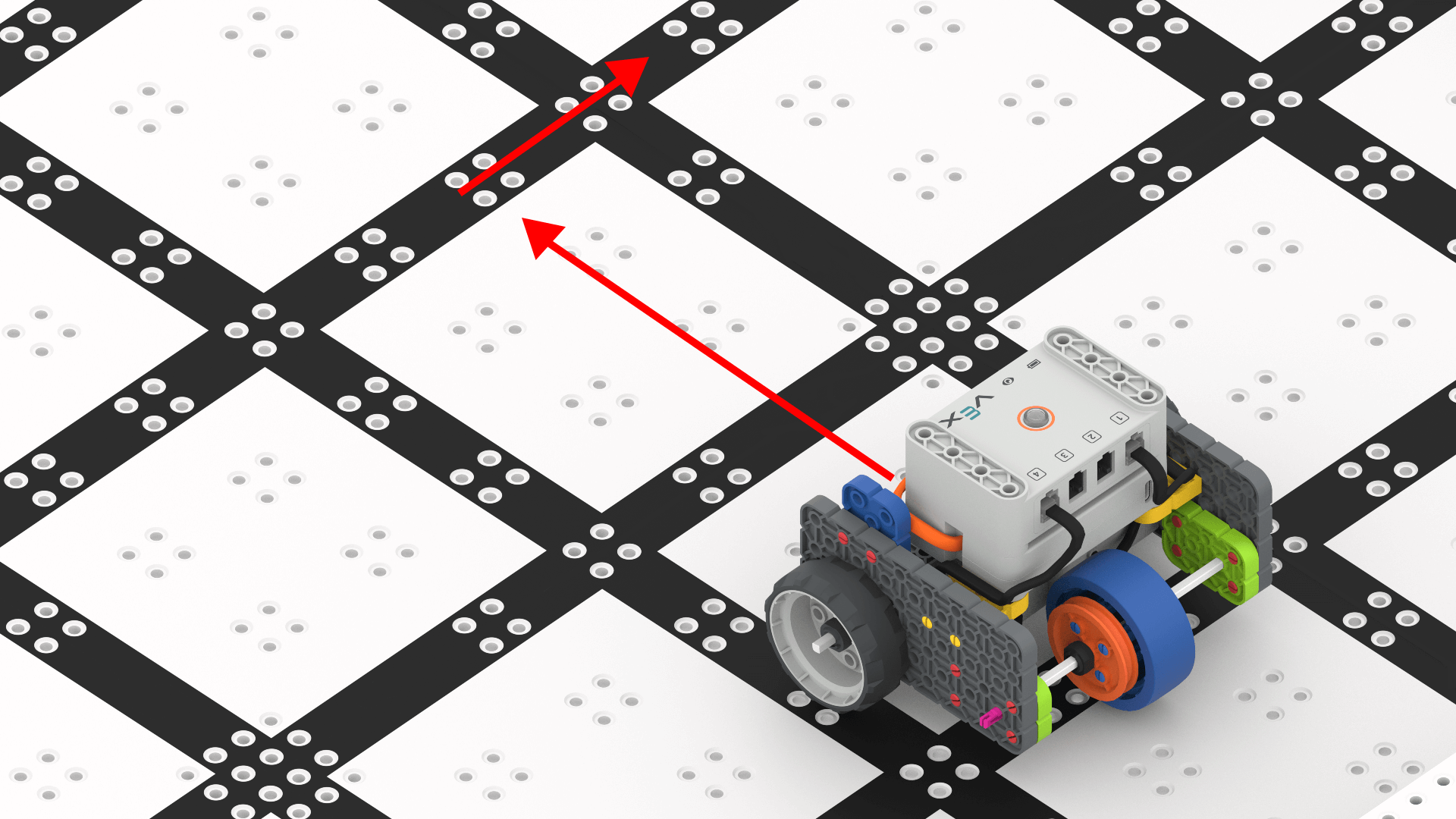
ചലഞ്ച് ഏരിയയിൽ ചുറ്റി സഞ്ചരിക്കാനും വസ്തുക്കൾ ശേഖരിക്കാനും വിദ്യാർത്ഥികൾ അവരുടെ കോഡ് ബേസ് കോഡ് ചെയ്യും. ചലഞ്ച് ഏരിയ നാവിഗേറ്റ് ചെയ്യുന്നതിന് അവരുടെ കോഡ് ബേസ് ശരിയായ ക്രമത്തിൽ മുന്നോട്ടും പിന്നോട്ടും ഇടത്തോട്ടും വലത്തോട്ടും നീങ്ങുന്ന തരത്തിൽ അവരുടെ പ്രോജക്റ്റിലെ കമാൻഡുകൾ ക്രമപ്പെടുത്തേണ്ടതുണ്ട്.
- മുന്നോട്ട് നീങ്ങുക
- വലത്തോട്ട് തിരിയുക
- മുന്നോട്ട് നീങ്ങുക
വിഘടനം
വിഘടനം എന്നത് സങ്കീർണ്ണമായ ഒരു പ്രശ്നത്തെ കൂടുതൽ കൈകാര്യം ചെയ്യാവുന്നതും മനസ്സിലാക്കാൻ എളുപ്പമുള്ളതുമായ പെരുമാറ്റരീതികളായി വിഭജിക്കുന്നതിനെയാണ് സൂചിപ്പിക്കുന്നത്. പ്രശ്നത്തെ ചെറിയ ഭാഗങ്ങളായി വിഭജിക്കുന്നത് ഓരോ ഭാഗവും കൂടുതൽ വിശദമായി പരിശോധിക്കാനും കൂടുതൽ എളുപ്പത്തിൽ പരിഹരിക്കാനും കഴിയുമെന്ന് അർത്ഥമാക്കുന്നു. ഉദാഹരണത്തിന്, ഒരു വിദ്യാർത്ഥിക്ക് അവരുടെ റോബോട്ട് ഒരു ചതുരത്തിൽ നീങ്ങണമെങ്കിൽ, അവർ അതിനെ ചെറിയ കമാൻഡുകളായി വിഭജിക്കേണ്ടതുണ്ട്. ബ്രേക്ക്ഡൗൺ പ്രക്രിയ പരിഷ്കരിക്കുന്നത് വിദ്യാർത്ഥികൾക്ക് പരിശീലിക്കേണ്ടത് പ്രധാനമാണ്, കാരണം തുടക്കത്തിൽ കമാൻഡുകളെ ചെറിയ ഘടകങ്ങളായി വിഭജിക്കാൻ അവർക്ക് കഴിയില്ല:
| ഒരു ചതുര ബ്രേക്ക്ഡൗൺ 1-ൽ നീങ്ങുക | ഒരു ചതുര ബ്രേക്ക്ഡൌൺ 2-ൽ നീങ്ങുക | ഒരു ചതുര ബ്രേക്ക്ഡൗണിൽ നീങ്ങുക 3 |
|---|---|---|
|
|
|
എന്താണ് സ്യൂഡോകോഡ്?
കോഡിന്റെ വാക്കാലുള്ളതും എഴുതിയതുമായ വിവരണങ്ങൾ സംയോജിപ്പിക്കുന്ന കോഡിംഗിനായുള്ള ഒരു ചുരുക്കെഴുത്ത് നൊട്ടേഷനാണ് സ്യൂഡോകോഡ്.
പലപ്പോഴും, വിദ്യാർത്ഥികൾക്ക് ഒരു പരിഹാരം കണ്ടെത്തുന്നതിനുള്ള വഴി "ഊഹിക്കാനും പരിശോധിക്കാനും" കഴിയും. എന്നിരുന്നാലും, ഇത് പ്രോഗ്രാമിംഗ് ആശയങ്ങളെക്കുറിച്ച് ഒരു ആശയപരമായ ധാരണ വളർത്തിയെടുക്കുന്നതിലേക്ക് നയിക്കുന്നില്ല. സ്യൂഡോകോഡിന്റെ രചന വിദ്യാർത്ഥികളെ പ്രോഗ്രാമിംഗിനെക്കുറിച്ചുള്ള ഒരു ഉപരിതല തലത്തിലുള്ള ധാരണയ്ക്ക് അപ്പുറത്തേക്ക്, കൂടുതൽ ആശയപരമായ ധാരണയിലേക്ക് നീങ്ങാൻ സഹായിക്കുന്നു. പ്രോഗ്രാമിംഗ് ആരംഭിക്കുന്നതിന് മുമ്പ് വിദ്യാർത്ഥികൾ അവരുടെ പ്രോഗ്രാമിംഗ് പരിഹാരത്തെക്കുറിച്ച് ആശയപരമായി ചിന്തിക്കണമെന്ന് സ്യൂഡോകോഡ് ആവശ്യപ്പെടുന്നു. അധ്യാപകർ വിദ്യാർത്ഥികളുമായി സ്യൂഡോകോഡിനെക്കുറിച്ച് ചർച്ച ചെയ്യണമെങ്കിൽ, വിദ്യാർത്ഥികളോട് ഇവ ചോദിച്ചുകൊണ്ട് ചോദിക്കണം:
- അവരുടെ പ്രോജക്റ്റ് എന്ത് നേട്ടമാണ് കൈവരിക്കാൻ ആഗ്രഹിക്കുന്നത്?
- പദ്ധതിയുടെ ഉദ്ദേശ്യത്തെയോ ലക്ഷ്യത്തെയോ നിങ്ങൾ എങ്ങനെയാണ് ചെറിയ നിർദ്ദിഷ്ട പ്രസ്താവനകളായി വിഭജിക്കാൻ പോകുന്നത്?
ഈ ഉദാഹരണത്തിൽ, റോബോട്ട് മുന്നോട്ട് നീങ്ങാനും, ഒരു മതിൽ കണ്ടെത്താനും, വലത്തേക്ക് തിരിയാനും, വീണ്ടും മുന്നോട്ട് നീങ്ങാനും ഒരു സ്യൂഡോകോഡ് സൃഷ്ടിക്കാൻ വിദ്യാർത്ഥികളോട് ആവശ്യപ്പെട്ടാൽ, അത് ഇപ്രകാരമായിരിക്കും:
- ഒരു ഭിത്തിയിൽ നിന്ന് 50 മില്ലീമീറ്റർ അകലെ ആകുന്നതുവരെ റോബോട്ട് മുന്നോട്ട് ഓടിക്കുക.
- റോബോട്ട് നിർത്തൂ
- റോബോട്ട് 90 ഡിഗ്രി തിരിക്കുക
- റോബോട്ട് നിർത്തൂ
- മുന്നോട്ട് 600 മി.മീ. ഡ്രൈവ് ചെയ്യുക
ഒരു സ്യൂഡോകോഡ് സൃഷ്ടിച്ചുകഴിഞ്ഞാൽ, വിദ്യാർത്ഥികൾ അവരുടെ സ്യൂഡോകോഡിന്റെ ഓരോ ഘട്ടവും എങ്ങനെ വിജയകരമായി പൂർത്തിയാക്കാമെന്ന് റോബോട്ടിന് നിർദ്ദേശം നൽകുന്നതിനായി പ്രോഗ്രാമിംഗ് കോഡ് സൃഷ്ടിക്കും.
റോബോട്ടുകളുടെ പെരുമാറ്റ രീതികൾ എന്തൊക്കെയാണ്?
റോബോട്ട് എന്താണ് ചെയ്യുന്നതെന്നും അത് എന്തുചെയ്യണമെന്നും സംസാരിക്കാൻ "പെരുമാറ്റങ്ങൾ" വളരെ സൗകര്യപ്രദമായ ഒരു മാർഗമാണ്. മുന്നോട്ട് നീങ്ങുക, നിർത്തുക, തിരിയുക, ഒരു തടസ്സം തേടുക - ഇവയെല്ലാം പെരുമാറ്റരീതികളാണ്.
വിദ്യാർത്ഥികൾ കോഡിംഗ് ആരംഭിക്കുമ്പോൾ, പെരുമാറ്റത്തിന്റെ അടിസ്ഥാനത്തിൽ റോബോട്ടിന്റെ പ്രവർത്തനങ്ങളെക്കുറിച്ചും ചിന്തിക്കാൻ തുടങ്ങണം. വിദ്യാർത്ഥികൾ കോഡ് ചെയ്യുമ്പോൾ, അവർ ഈ ഘട്ടങ്ങൾ പാലിക്കണം:
- ആവശ്യമുള്ള പ്രവർത്തനം റോബോട്ടിന് നിർവഹിക്കുന്നതിന് ഒരു പദ്ധതി തയ്യാറാക്കുക.
- പ്ലാനിലെ പെരുമാറ്റരീതികൾ തിരിച്ചറിയുകയും അവയെ കഴിയുന്നത്ര ചെറുതാക്കാൻ ശ്രമിക്കുകയും ചെയ്യുക.
- ആ പദ്ധതി റോബോട്ടിന് പിന്തുടരാൻ കഴിയുന്ന ഒരു പ്രോജക്റ്റിലേക്ക് വിവർത്തനം ചെയ്യുക.
റോബോട്ട് പിന്തുടരേണ്ട പെരുമാറ്റങ്ങളുടെ ക്രമമായിരിക്കും പ്ലാൻ, കൂടാതെ VEXcode GO-യിലേക്ക് വിവർത്തനം ചെയ്ത പെരുമാറ്റങ്ങൾ മാത്രമായിരിക്കും പ്രോജക്റ്റ്.
ജോലികളെ ചെറിയ പെരുമാറ്റരീതികളായി വിഭജിക്കുകയും ആ പെരുമാറ്റരീതികൾ ഉപയോഗിച്ച് പരിഹാരങ്ങൾ നിർമ്മിക്കുകയും ചെയ്യുന്നത് നിരവധി വ്യത്യസ്ത വിഷയങ്ങളിൽ പ്രയോഗിക്കാൻ കഴിയുന്ന ഒരു കഴിവാണ്.
എന്താണ് VEXcode GO?
VEXcode GO എന്നത് VEX GO റോബോട്ടുകളുമായി ആശയവിനിമയം നടത്താൻ ഉപയോഗിക്കുന്ന ഒരു കോഡിംഗ് പരിതസ്ഥിതിയാണ്. റോബോട്ടുകളുടെ പ്രവർത്തനങ്ങൾ നിയന്ത്രിക്കുന്ന VEXcode GO പ്രോജക്ടുകൾ സൃഷ്ടിക്കാൻ വിദ്യാർത്ഥികൾ ഡ്രാഗ് ആൻഡ് ഡ്രോപ്പ് ഇന്റർഫേസ് ഉപയോഗിക്കുന്നു. ഓരോ ബ്ലോക്കിന്റെയും ഉദ്ദേശ്യം അതിന്റെ ആകൃതി, നിറം, ലേബൽ തുടങ്ങിയ ദൃശ്യ സൂചനകൾ ഉപയോഗിച്ച് തിരിച്ചറിയാൻ കഴിയും.
ഈ യൂണിറ്റിൽ താഴെ പറയുന്ന VEXcode GO ബ്ലോക്കുകൾ ഉപയോഗിക്കും:
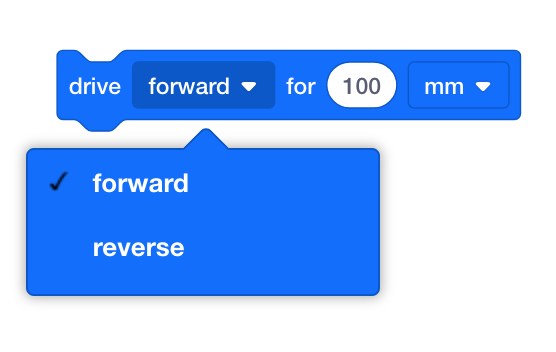
[ഡ്രൈവ് ഫോർ] - ഒരു നിശ്ചിത ദൂരത്തേക്ക് ഡ്രൈവ്ട്രെയിൻ മുന്നോട്ടോ പിന്നോട്ടോ നീക്കുന്നു. ഡ്രൈവ്ട്രെയിൻ ഏത് ദിശയിലേക്ക് നീങ്ങണമെന്ന് തിരഞ്ഞെടുക്കുക, ഓവലിൽ ഒരു മൂല്യം നൽകി അത് എത്ര ദൂരം നീങ്ങണമെന്ന് സജ്ജമാക്കുക.
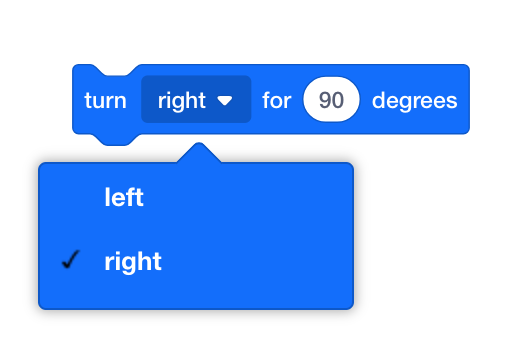
[തിരിക്കുക] - ഒരു നിശ്ചിത എണ്ണം ഡിഗ്രികൾക്കായി ഡ്രൈവ്ട്രെയിൻ ഇടത്തോട്ടോ വലത്തോട്ടോ തിരിക്കുന്നു. ഡ്രൈവ്ട്രെയിൻ തിരിയേണ്ട ദിശ തിരഞ്ഞെടുക്കുക, ഓവലിൽ നിരവധി ഡിഗ്രികൾ നൽകി അത് എത്ര ദൂരം നീങ്ങണമെന്ന് സജ്ജമാക്കുക.
[അഭിപ്രായം] - പ്രോഗ്രാമർമാർക്ക് അവരുടെ പ്രോജക്റ്റ് വിവരിക്കാൻ സഹായിക്കുന്ന വിവരങ്ങൾ എഴുതാൻ അനുവദിക്കുന്നു. അഭിപ്രായങ്ങൾ പ്രോജക്റ്റിനെയോ അതിനു ചുറ്റുമുള്ള ബ്ലോക്കുകളെയോ മാറ്റില്ല.

നിങ്ങളുടെ ക്ലാസ് മുറിയിൽ VEXcode GO ഉപയോഗിക്കാൻ തുടങ്ങുന്നതിന്, ഒരു അധ്യാപകന്റെ ഉപകരണത്തിലേക്ക് VEX ക്ലാസ്റൂം ആപ്പ് ഡൗൺലോഡ് ചെയ്യുക, തുടർന്ന് GO ബ്രെയിൻ ഫേംവെയർ എങ്ങനെ അപ്ഡേറ്റ് ചെയ്യാം, GO ബ്രെയിനുകളുടെ പേരുമാറ്റുക, കണ്ടെത്തുക, നിങ്ങളുടെ ക്ലാസ് മുറിയിൽ GO ബ്രെയിനുകളുടെ ബാറ്ററികൾ നിരീക്ഷിക്കുക എന്നിവ പഠിക്കാൻ Using the VEX Classroom App ലേഖനത്തിലെ ഘട്ടങ്ങൾ പാലിക്കുക. VEXcode GO-യെക്കുറിച്ചുള്ള കൂടുതൽ വിവരങ്ങൾക്ക്, VEX ലൈബ്രറിയുടെ VEXcode GO സെക്ഷൻ സന്ദർശിക്കുക.