
In this lesson, you will explore how the VEX AIM Coding Robot “sees” its environment, by using the AI Vision Dashboard in VEXcode AIM. You'll also build on what you've learned about using macro blocks as you code the robot to deliver barrels to an AprilTag using the Move to object block.
Watch the video below to learn about:
- How the AI Vision Sensor perceives its environment
- How the AI Vision Dashboard in the Monitor tab of VEXcode AIM allows you to view sensor feedback in real time.
- How to code the robot to move to an AprilTag using the Move to object block.
Now that you have watched the video, capture your thoughts in your journal. Answer these questions to guide your thinking and help you prepare for a whole-class discussion:
- How do you envision using the AI Vision Dashboard to help you code your robot using the AI Vision Sensor?
- How do you think robot perception is different from human perception?
- How do you think the Move to object block will be useful?
- What evidence do you have from the video that supports your ideas?
- What are some questions you have after watching the video? What do you think will help you answer them?
Guided Practice
Now that you have watched and discussed the video, it is your turn to practice!
Step 1: Set up your field as shown in the image below.
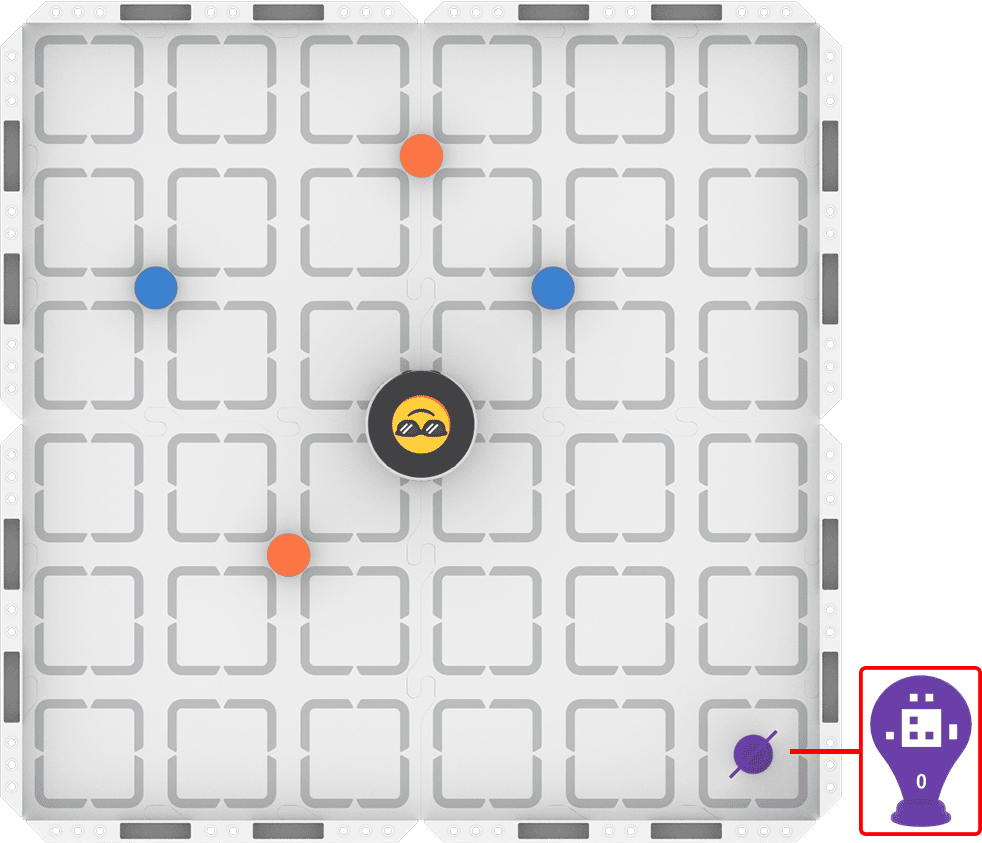
Step 2: Use Drive mode to model the movements your robot needs to make to complete the task.
- Your task is to drive the robot to pick up each of the four barrels and place them in front of AprilTag ID 0. Document your driving, then plan how to code that movement.
- Use this task card (Google / .docx / .pdf) to guide your practice.
- Pro Tip: After you place each barrel in front of the AprilTag, remove it from the field by hand. This allows the AI Vision Sensor to have the AprilTag in its field of view.
Step 3: Code the robot to complete the task.
- Your task is to use your path plan from Step 2 to code the robot to pick up each of the four barrels and place them in front of AprilTag ID 0.
- Use this task card (Google / .docx / .pdf) to guide your practice.
- Pro Tip: Use the AI Vision Dashboard in the Monitor tab to help you. To learn more about the AI Vision Dashboard, view this article.
Step 4: Explore! Move between driving and coding to iterate on your project and improve your strategy.
- Together with your group, brainstorm ways to make your project better.
- Drive the robot to test out your ideas, and choose one to start with.
- Iterate on your project to make it match the new driven behaviors.
- Continue to move between driving and coding frequently to iterate on your project and find the best strategy to complete the task!
Resources for Practice:
The articles linked here are available if you need additional support while completing the activity.
Wrap-Up
Now that you have practiced, it is time to share what you learned. Answer the following questions in your journal to help you reflect on your learning and prepare for a whole-class discussion:
- How has driving and coding the robot in this lesson helped you to understand how robots use sensors to perceive the world? Explain using evidence from your journal.
- In what situations do you think the Get object block would be most useful?
- What information did you learn from the AI Vision Dashboard in the Monitor tab, and how did it help you understand what the robot was doing?
- Have your collaboration strategies changed over this course? If so, explain how. If not, what would you like to improve?
Select Next > to move on to the Unit Challenge.