
In deze les onderzoekt u hoe de VEX AIM-codeerrobot zijn omgeving 'ziet' met behulp van het AI Vision Dashboard in VEXcode AIM. Je bouwt ook voort op wat je hebt geleerd over het gebruik van macroblokken terwijl je de robot programmeert om vaten af te leveren aan een AprilTag met behulp van het blok Verplaatsen naar object.
Bekijk de onderstaande video voor meer informatie:
- Hoe de AI Vision Sensor zijn omgeving waarneemt
- Hoe u met het AI Vision Dashboard op het tabblad Monitor van VEXcode AIM sensorfeedback in realtime kunt bekijken.
- Hoe je de robot programmeert om naar een AprilTag te bewegen met behulp van het blok Verplaats naar object .
Nu u de video hebt bekeken, kunt u uw gedachten in uw dagboek noteren. Beantwoord de volgende vragen om uw denkproces te sturen en u voor te bereiden op een discussie met de hele klas:
- Hoe denkt u dat u het AI Vision Dashboard kunt gebruiken om uw robot te coderen met behulp van de AI Vision Sensor?
- Hoe denk je dat de perceptie van robots verschilt van de perceptie van mensen?
- Hoe denk je dat het blok Verplaats naar object nuttig zal zijn?
- Welk bewijs uit de video ondersteunt jouw ideeën?
- Welke vragen heb je nadat je de video hebt bekeken? Wat denk je dat je zal helpen deze vragen te beantwoorden?
Nu u de video hebt bekeken, kunt u uw gedachten in uw dagboek noteren. Beantwoord de volgende vragen om uw denkproces te sturen en u voor te bereiden op een discussie met de hele klas:
- Hoe denkt u dat u het AI Vision Dashboard kunt gebruiken om uw robot te coderen met behulp van de AI Vision Sensor?
- Hoe denk je dat de perceptie van robots verschilt van de perceptie van mensen?
- Hoe denk je dat het blok Verplaats naar object nuttig zal zijn?
- Welk bewijs uit de video ondersteunt jouw ideeën?
- Welke vragen heb je nadat je de video hebt bekeken? Wat denk je dat je zal helpen deze vragen te beantwoorden?
Nadat de leerlingen de video hebben bekeken en voordat ze gaan oefenen, komen bij elkaar voor een discussie met de hele klas Gebruik de antwoorden van studenten op de gestelde vragen als basis voor de discussie.
Door te onderzoeken wat het verschil is tussen de manier waarop een robot of computer de wereld ziet en de manier waarop mensen de wereld zien, ontwikkelen leerlingen een fundamenteel begrip van hoe AI werkt. Mensen verkrijgen informatie over hun omgeving via hun vijf zintuigen, terwijl robots hiervoor gebruik moeten maken van sensorfeedback. Het is belangrijk om de aandacht van leerlingen op deze verkenning te richten gedurende de les en daarna, zodat ze dit belangrijke concept binnen AI volledig begrijpen.
Bovendien wordt de term 'gezichtsveld' gebruikt om het gebied te beschrijven waarin de AI Vision Sensor objecten kan waarnemen. Introduceer en herhaal deze term in gesprekken gedurende de les.
Begeleide oefening
Nu je de video hebt bekeken en besproken, is het jouw beurt om te oefenen!
Stap 1: Stel uw veld in zoals in de onderstaande afbeelding.
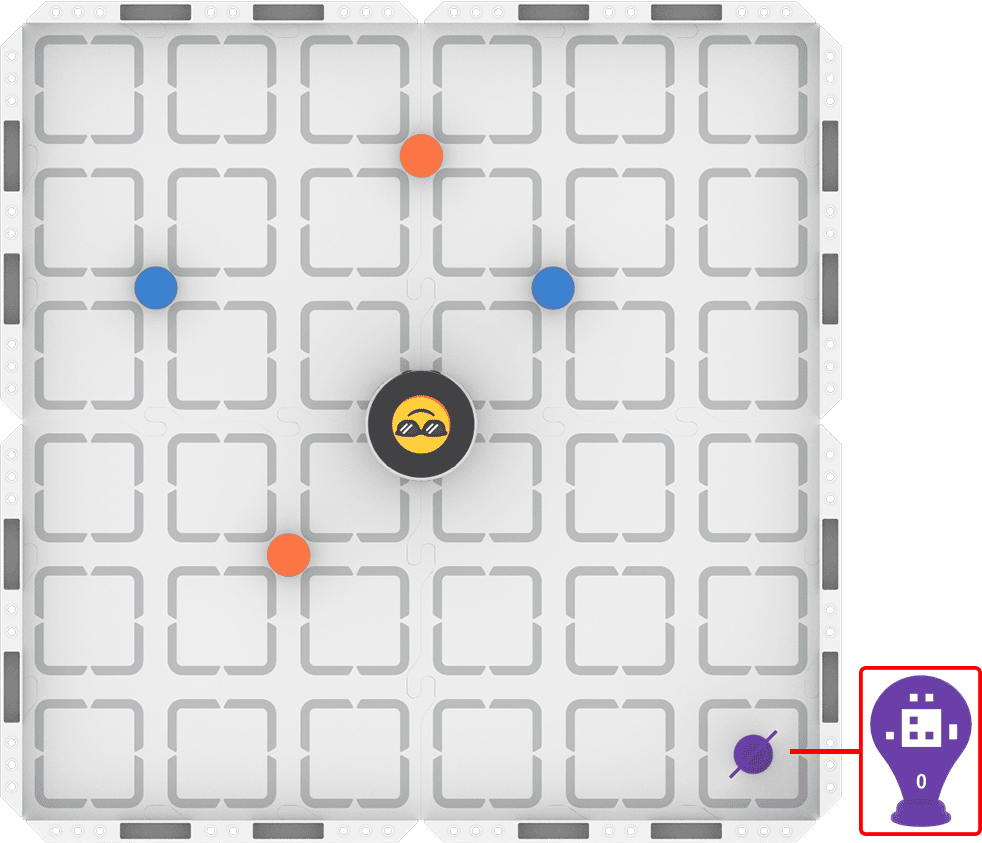
Stap 2: Gebruik de rijmodus om de bewegingen te modelleren die uw robot moet maken om de taak te voltooien.
- Jouw taak is om de robot zo te besturen dat hij elk van de vier vaten oppakt en ze voor AprilTag ID 0 plaatst. Documenteer uw rijgedrag en bedenk vervolgens hoe u die beweging gaat coderen.
- Gebruik deze taakkaart (Google / .docx / .pdf) als leidraad bij uw oefening.
- Professionele tip: Nadat u elk vat voor de AprilTag hebt geplaatst, verwijdert u het met de hand uit het veld. kan de AI Vision Sensor de AprilTag in zijn gezichtsveld hebben.
Stap 3: Programmeer de robot om de taak voltooien.
- Jouw taak is om het padplan uit stap 2 te gebruiken om de robot te programmeren om elk van de vier vaten op te pakken en ze voor AprilTag ID 0 te plaatsen.
- Gebruik deze taakkaart (Google / .docx / .pdf) als leidraad bij uw oefening.
- Pro-tip: Gebruik het AI Vision-dashboard op het tabblad Monitor om u te helpen. Voor meer informatie over het AI Vision Dashboard, bekijk dit artikel.
Stap 4: Ontdekken! Wissel tussen sturen en coderen om iteraties uit te voeren op uw project en uw strategie te verbeteren.
- Bedenk samen met uw groep hoe u uw project kunt verbeteren.
- Bestuur de robot om je ideeën uit te testen en kies er één uit om mee te beginnen.
- Herhaal uw project zodat het aansluit bij het nieuwe, gedreven gedrag.
- Blijf regelmatig wisselen tussen rijden en coderen om iteraties in uw project door te voeren en de beste strategie te vinden om de taak te voltooien!
Hulpmiddelen voor de praktijk:
De artikelen die hier zijn gelinkt, zijn beschikbaar als u extra ondersteuning nodig hebt tijdens het voltooien van de activiteit.
Nu je de video hebt bekeken en besproken, is het jouw beurt om te oefenen!
Stap 1: Stel uw veld in zoals in de onderstaande afbeelding.
Stap 2: Gebruik de rijmodus om de bewegingen te modelleren die uw robot moet maken om de taak te voltooien.
- Jouw taak is om de robot zo te besturen dat hij elk van de vier vaten oppakt en ze voor AprilTag ID 0 plaatst. Documenteer uw rijgedrag en bedenk vervolgens hoe u die beweging gaat coderen.
- Gebruik deze taakkaart (Google / .docx / .pdf) als leidraad bij uw oefening.
- Professionele tip: Nadat u elk vat voor de AprilTag hebt geplaatst, verwijdert u het met de hand uit het veld. kan de AI Vision Sensor de AprilTag in zijn gezichtsveld hebben.
Stap 3: Programmeer de robot om de taak voltooien.
- Jouw taak is om het padplan uit stap 2 te gebruiken om de robot te programmeren om elk van de vier vaten op te pakken en ze voor AprilTag ID 0 te plaatsen.
- Gebruik deze taakkaart (Google / .docx / .pdf) als leidraad bij uw oefening.
- Pro-tip: Gebruik het AI Vision-dashboard op het tabblad Monitor om u te helpen. Voor meer informatie over het AI Vision Dashboard, bekijk dit artikel.
Stap 4: Ontdekken! Wissel tussen sturen en coderen om iteraties uit te voeren op uw project en uw strategie te verbeteren.
- Bedenk samen met uw groep hoe u uw project kunt verbeteren.
- Bestuur de robot om je ideeën uit te testen en kies er één uit om mee te beginnen.
- Herhaal uw project zodat het aansluit bij het nieuwe, gedreven gedrag.
- Blijf regelmatig wisselen tussen rijden en coderen om iteraties in uw project door te voeren en de beste strategie te vinden om de taak te voltooien!
Hulpmiddelen voor de praktijk:
De artikelen die hier zijn gelinkt, zijn beschikbaar als u extra ondersteuning nodig hebt tijdens het voltooien van de activiteit.
Herinner leerlingen aan de vastgestelde verwachtingen voor groepswerk voordat ze beginnen.
Deel de stap 2 taakkaart (Google / .docx / .pdf) uit aan elke leerling. Herinner de leerlingen eraan dat het doel van autorijden is om ervoor te zorgen dat iedereen in de groep een gedeeld mentaal model ontwikkelt van hoe de robot moet bewegen om de taak succesvol uit te voeren. Moedig studenten aan om goed na te denken over hoe ze hun rijgedrag documenteren. Ze zullen hun rijvaardigheid immers gebruiken als documentatie voor het schrijven van hun code.
Terwijl de leerlingen rijden, loop rond in het lokaal en vraag je aan de leerlingen hoe ze het geleerde hebben geleerd. Stel vragen zoals:
- Wat valt u op aan de manier waarop de robot beweegt om elk vat op te pakken terwijl u rijdt met de AI Vision Sensor?
- Heeft u tijdens het rijden iets onverwachts opgemerkt? Zo ja, hoe kan deze observatie uw codeerbeslissingen beïnvloeden?
- Als jouw groep het niet eens is over wat er gedocumenteerd moet worden, of welk pad er als eerste geprobeerd moet worden bij het coderen, hoe lossen jullie dat dan op?
Geef elke leerling de taakkaart van stap 3 (Google / .docx / .pdf) nadat ze aan de succescriteria voor het autorijden hebben voldaan en hun geplande route met u hebben gedeeld. Vervolgens gebruiken de studenten hun plan om hun eerste VEXcode-projecten te bouwen. Herinner hen eraan dat ze hun projecten stapsgewijs moeten bouwen en testen.
Terwijl de leerlingen bezig zijn met het programmeren van de robot, loop je door de klas en bespreek je met hen de voortgang en leerervaringen. Stel vragen zoals:
- Gebruikt u het AI Vision Dashboard om u te helpen met coderen? Zo ja, hoe?
- Waarin verschilt het coderen van dit project van autorijden? Wat is de gelijkenis?
- Welke ideeën die tijdens het rijden zijn ontstaan, heb je toegepast op jouw codeerproject? Werkten ze zoals verwacht? Waarom wel of waarom niet?
Zodra studenten een eerste codeerproject hebben dat de taak voltooit, moeten ze doorgaan naar stap 4 en beginnen met itereren.
- Wat als u de snelheid of precisie van uw robot voor dit project moet aanpassen? Welke strategieën kunnen helpen?
- Wat valt je op over de manier waarop robots hun omgeving waarnemen? Geeft autorijden je andere inzichten dan coderen?
- Hoe neemt u gezamenlijke beslissingen over welke onderdelen van uw project u moet wijzigen? Hoe komen jullie tot overeenstemming over de door te voeren verandering?
Afronding
Nu je hebt geoefend, is het tijd om te delen wat je hebt geleerd. Beantwoord de volgende vragen in je dagboek om je te helpen reflecteren op je leerproces en je voor te bereiden op een discussie met de hele klas:
- Hoe heeft het besturen en programmeren van de robot in deze les je geholpen bij het begrijpen hoe robots sensoren gebruiken om de wereld waar te nemen? Leg dit uit aan de hand van bewijs uit je dagboek.
- In welke situaties denk je dat het blok Get object het nuttigst zou zijn?
- Welke informatie kreeg u via het AI Vision Dashboard op het tabblad Monitor en hoe hielp het u te begrijpen wat de robot deed?
- Zijn uw samenwerkingsstrategieën in de loop van de tijd veranderd? Zo ja, leg uit hoe. Zo niet, wat zou u willen verbeteren?
Nu je hebt geoefend, is het tijd om te delen wat je hebt geleerd. Beantwoord de volgende vragen in je dagboek om je te helpen reflecteren op je leerproces en je voor te bereiden op een discussie met de hele klas:
- Hoe heeft het besturen en programmeren van de robot in deze les je geholpen bij het begrijpen hoe robots sensoren gebruiken om de wereld waar te nemen? Leg dit uit aan de hand van bewijs uit je dagboek.
- In welke situaties denk je dat het blok Get object het nuttigst zou zijn?
- Welke informatie kreeg u via het AI Vision Dashboard op het tabblad Monitor en hoe hielp het u te begrijpen wat de robot deed?
- Zijn uw samenwerkingsstrategieën in de loop van de tijd veranderd? Zo ja, leg uit hoe. Zo niet, wat zou u willen verbeteren?
Begeleid leerlingen bij het delen van hun kennis in een discussie met de hele klas. Help leerlingen om door middel van oefening te reflecteren op hun leerproces, om zo tot gezamenlijke inzichten of leerdoelen te komen.
Gebruik de vragen die de studenten in hun dagboeken hebben beantwoord als uitgangspunt voor de discussie. Stel vervolgvragen om het begrip van de student te bevorderen:
- Over de AI Vision Sensor:
- Wat vertelt het Dashboard u over de AI Vision Sensor? Wat vertelt het je niet? Welke andere informatie wilt u hebben over de objecten die de AI Vision Sensor detecteert?
- Hoe verschilt de manier waarop de AI Vision Sensor de wereld waarneemt van de manier waarop uw ogen de wereld zien?
- Denk je dat jouw ogen krachtiger of minder krachtig zijn dan de AI Vision Sensor? Waarom?
- Over coderen met macroblokken:
- Welke gedragingen voert de robot uit tijdens het uitvoeren van een Verplaats naar object blok of een macroblok?
- Welke gegevens van de sensor worden volgens jou gebruikt in het macroblok?
- Over samenwerking:
- Hoe is uw vermogen om samen problemen op te lossen verbeterd?
- Wat zou je beter willen doen?
- Welke stappen kunt u nemen om dat doel te bereiken?
Ga terug naar het gedeelde document dat u tijdens les 1 hebt gemaakt. Hierin staan de vragen die leerlingen hebben over de AI Vision Sensor. Vul het aan met de antwoorden van de leerlingen op basis van de nieuwe informatie die ze tijdens deze les hebben geleerd. Noteer eventuele nieuwe vragen die zijn opgekomen.
Selecteer Volgende > om door te gaan naar de Unit Challenge.