
ในบทเรียนนี้ คุณจะสำรวจว่าหุ่นยนต์โค้ดดิ้ง VEX AIM "มองเห็น" สภาพแวดล้อมของมันได้อย่างไร โดยใช้ AI Vision Dashboard ใน VEXcode AIM นอกจากนี้ คุณยังจะได้เรียนรู้เกี่ยวกับการใช้บล็อกแมโครเมื่อคุณเขียนโค้ดหุ่นยนต์เพื่อส่งถังไปยัง AprilTag โดยใช้บล็อก เคลื่อนที่ไปยังวัตถุ
ชมวิดีโอด้านล่างเพื่อเรียนรู้เกี่ยวกับ:
- เซ็นเซอร์ AI Vision รับรู้สภาพแวดล้อมอย่างไร
- AI Vision Dashboard ในแท็บ Monitor ของ VEXcode AIM ช่วยให้คุณดูผลตอบรับจากเซ็นเซอร์แบบเรียลไทม์ได้อย่างไร
- วิธีการเขียนโค้ดให้หุ่นยนต์เคลื่อนที่ไปยัง AprilTag โดยใช้บล็อก Move to object
ตอนนี้คุณได้ชมวิดีโอแล้ว ให้บันทึกความคิดของคุณลงในสมุดบันทึก ตอบคำถามเหล่านี้เพื่อเป็นแนวทางในการคิดของคุณและช่วยคุณเตรียมความพร้อมสำหรับการอภิปรายทั้งชั้นเรียน:
- คุณมองเห็นการใช้ AI Vision Dashboard เพื่อช่วยคุณเขียนโค้ดหุ่นยนต์โดยใช้ AI Vision Sensor ได้อย่างไร
- คุณคิดว่าการรับรู้ของหุ่นยนต์แตกต่างจากการรับรู้ของมนุษย์อย่างไร?
- คุณคิดว่าบล็อก Move to object จะมีประโยชน์อย่างไร?
- คุณมีหลักฐานอะไรจากวิดีโอที่สนับสนุนความคิดของคุณบ้าง?
- คุณมีคำถามอะไรบ้างหลังจากชมวิดีโอนี้? คุณคิดว่าอะไรจะช่วยคุณตอบคำถามเหล่านี้ได้?
ตอนนี้คุณได้ชมวิดีโอแล้ว ให้บันทึกความคิดของคุณลงในสมุดบันทึก ตอบคำถามเหล่านี้เพื่อเป็นแนวทางในการคิดของคุณและช่วยคุณเตรียมความพร้อมสำหรับการอภิปรายทั้งชั้นเรียน:
- คุณมองเห็นการใช้ AI Vision Dashboard เพื่อช่วยคุณเขียนโค้ดหุ่นยนต์โดยใช้ AI Vision Sensor ได้อย่างไร
- คุณคิดว่าการรับรู้ของหุ่นยนต์แตกต่างจากการรับรู้ของมนุษย์อย่างไร?
- คุณคิดว่าบล็อก Move to object จะมีประโยชน์อย่างไร?
- คุณมีหลักฐานอะไรจากวิดีโอที่สนับสนุนความคิดของคุณบ้าง?
- คุณมีคำถามอะไรบ้างหลังจากชมวิดีโอนี้? คุณคิดว่าอะไรจะช่วยคุณตอบคำถามเหล่านี้ได้?
หลังจากที่นักเรียนชมวิดีโอแล้วและก่อนที่จะฝึกซ้อม จะมารวมกันเพื่ออภิปรายทั้งชั้นเรียน ใช้คำตอบของนักเรียนต่อคำถามที่ให้ไว้เป็นพื้นฐานสำหรับการอภิปราย
การสำรวจความแตกต่างระหว่างวิธีที่หุ่นยนต์หรือคอมพิวเตอร์มองเห็นโลกและวิธีที่มนุษย์มองเห็นโลกจะช่วยให้นักเรียนพัฒนาความเข้าใจพื้นฐานเกี่ยวกับการทำงานของ AI ได้รับข้อมูลเกี่ยวกับสภาพแวดล้อมของตนผ่านประสาทสัมผัสทั้งห้า ในขณะที่หุ่นยนต์จะต้องใช้การตอบรับจากเซ็นเซอร์จึงจะทำเช่นนั้นได้ สิ่งสำคัญคือต้องดึงความสนใจของนักเรียนกลับไปที่การสำรวจนี้ตลอดบทเรียนนี้และตลอดบทเรียนถัดไป เพื่อให้พวกเขาเข้าใจแนวคิดหลักใน AI นี้ได้อย่างถ่องแท้
นอกจากนี้ คำว่า "ขอบเขตการมองเห็น" ยังใช้เพื่ออธิบายพื้นที่ที่เซ็นเซอร์ AI Vision สามารถรับรู้วัตถุได้ แนะนำและเน้นย้ำคำศัพท์นี้ในการสนทนาตลอดบทเรียนนี้
การฝึกปฏิบัติแบบมีคำแนะนำ
ตอนนี้คุณได้ดูและอภิปรายวิดีโอแล้ว ถึงเวลาฝึกฝนแล้ว!
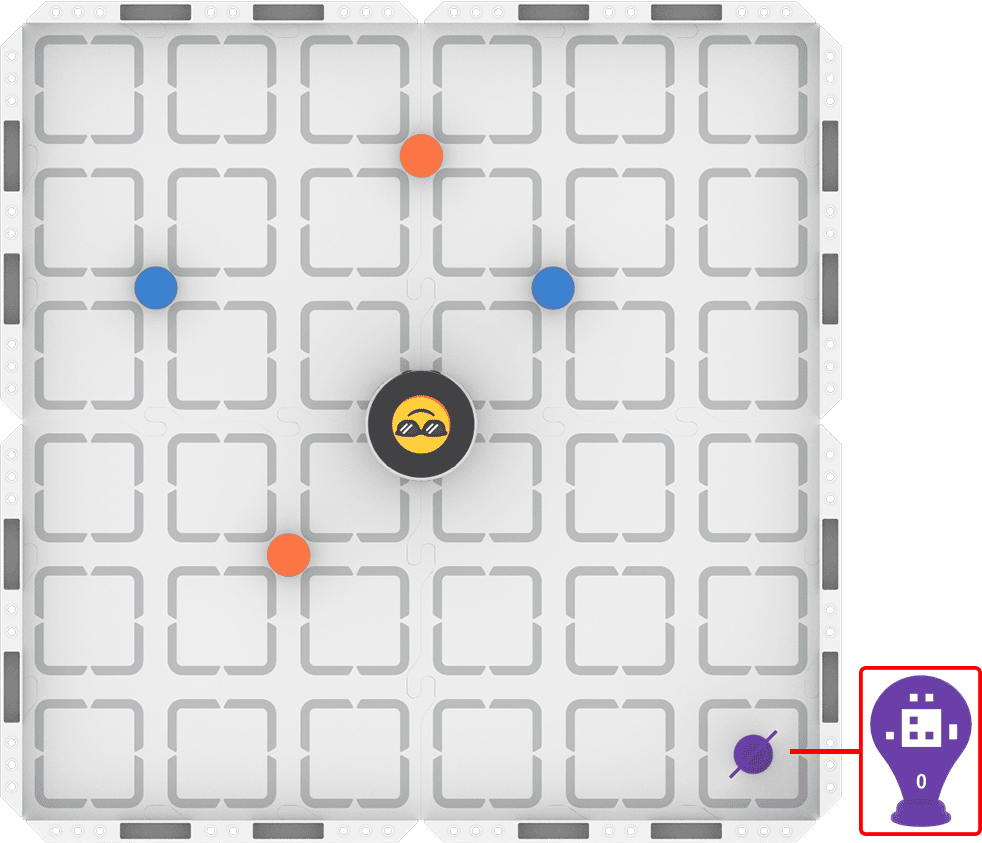
ขั้นตอนที่ 1: ตั้งค่าฟิลด์ของคุณตามที่แสดงในภาพด้านล่าง
ขั้นตอนที่ 2: ใช้โหมดขับเคลื่อนเพื่อสร้างแบบจำลองการเคลื่อนไหวที่หุ่นยนต์ของคุณต้องทำเพื่อทำงานให้เสร็จสมบูรณ์
- งานของคุณคือขับหุ่นยนต์เพื่อหยิบถังทั้งสี่ใบและวางไว้ข้างหน้า AprilTag ID 0 บันทึกการขับขี่ของคุณ จากนั้นวางแผนว่าจะเข้ารหัสการเคลื่อนไหวนั้นอย่างไร
- ใช้บัตรงานนี้ (Google / .docx / .pdf) เพื่อเป็นแนวทางในการฝึกฝนของคุณ
- เคล็ดลับ: หลังจากที่คุณวางถังแต่ละถังไว้ด้านหน้า AprilTag แล้ว ให้ถอดออกจากสนามด้วยมือ ซึ่งจะทำให้ AI Vision Sensor สามารถมี AprilTag อยู่ในระยะการมองเห็นได้
ขั้นตอน 3: เขียนโค้ดให้หุ่นยนต์ทำงานให้สำเร็จ
- งานของคุณคือใช้แผนเส้นทางจากขั้นตอนที่ 2 เพื่อเขียนโค้ดให้หุ่นยนต์หยิบถังทั้ง 4 ใบขึ้นมาและวางไว้ข้างหน้า AprilTag ID 0
- ใช้บัตรงานนี้ (Google / .docx / .pdf) เพื่อเป็นแนวทางในการฝึกฝนของคุณ
- เคล็ดลับสำหรับมืออาชีพ: ใช้ AI Vision Dashboard ในแท็บ Monitor เพื่อช่วยคุณ หากต้องการเรียนรู้เพิ่มเติมเกี่ยวกับ AI Vision Dashboard ดูบทความนี้
ขั้นตอนที่ 4: สำรวจ! สลับไปมาระหว่างการขับรถและการเขียนโค้ดเพื่อทำซ้ำในโครงการของคุณและปรับปรุงกลยุทธ์ของคุณ
- ร่วมกับกลุ่มของคุณระดมความคิดเพื่อหาแนวทางในการทำให้โครงการของคุณดีขึ้น
- ขับหุ่นยนต์เพื่อทดสอบความคิดของคุณ และเลือกหนึ่งอย่างเพื่อเริ่มต้น
- ทำซ้ำในโครงการของคุณเพื่อให้ตรงกับพฤติกรรมการขับเคลื่อนใหม่
- ดำเนินการต่อไประหว่างการขับรถและการเขียนโค้ดบ่อยครั้งเพื่อทำซ้ำในโครงการของคุณและค้นหาแนวทางที่ดีที่สุดในการทำงานให้สำเร็จ!
ทรัพยากรสำหรับการปฏิบัติ:
บทความที่เชื่อมโยงที่นี่สามารถใช้ได้ในกรณีที่คุณต้องการความช่วยเหลือเพิ่มเติมในระหว่างการดำเนินกิจกรรม
ตอนนี้คุณได้ดูและอภิปรายวิดีโอแล้ว ถึงเวลาฝึกฝนแล้ว!
ขั้นตอนที่ 1: ตั้งค่าฟิลด์ของคุณตามที่แสดงในภาพด้านล่าง
ขั้นตอนที่ 2: ใช้โหมดขับเคลื่อนเพื่อสร้างแบบจำลองการเคลื่อนไหวที่หุ่นยนต์ของคุณต้องทำเพื่อทำงานให้เสร็จสมบูรณ์
- งานของคุณคือขับหุ่นยนต์เพื่อหยิบถังทั้งสี่ใบและวางไว้ข้างหน้า AprilTag ID 0 บันทึกการขับขี่ของคุณ จากนั้นวางแผนว่าจะเข้ารหัสการเคลื่อนไหวนั้นอย่างไร
- ใช้บัตรงานนี้ (Google / .docx / .pdf) เพื่อเป็นแนวทางในการฝึกฝนของคุณ
- เคล็ดลับ: หลังจากที่คุณวางถังแต่ละถังไว้ด้านหน้า AprilTag แล้ว ให้ถอดออกจากสนามด้วยมือ ซึ่งจะทำให้ AI Vision Sensor สามารถมี AprilTag อยู่ในระยะการมองเห็นได้
ขั้นตอน 3: เขียนโค้ดให้หุ่นยนต์ทำงานให้สำเร็จ
- งานของคุณคือใช้แผนเส้นทางจากขั้นตอนที่ 2 เพื่อเขียนโค้ดให้หุ่นยนต์หยิบถังทั้ง 4 ใบขึ้นมาและวางไว้ข้างหน้า AprilTag ID 0
- ใช้บัตรงานนี้ (Google / .docx / .pdf) เพื่อเป็นแนวทางในการฝึกฝนของคุณ
- เคล็ดลับสำหรับมืออาชีพ: ใช้ AI Vision Dashboard ในแท็บ Monitor เพื่อช่วยคุณ หากต้องการเรียนรู้เพิ่มเติมเกี่ยวกับ AI Vision Dashboard ดูบทความนี้
ขั้นตอนที่ 4: สำรวจ! สลับไปมาระหว่างการขับรถและการเขียนโค้ดเพื่อทำซ้ำในโครงการของคุณและปรับปรุงกลยุทธ์ของคุณ
- ร่วมกับกลุ่มของคุณระดมความคิดเพื่อหาแนวทางในการทำให้โครงการของคุณดีขึ้น
- ขับหุ่นยนต์เพื่อทดสอบความคิดของคุณ และเลือกหนึ่งอย่างเพื่อเริ่มต้น
- ทำซ้ำในโครงการของคุณเพื่อให้ตรงกับพฤติกรรมการขับเคลื่อนใหม่
- ดำเนินการต่อไประหว่างการขับรถและการเขียนโค้ดบ่อยครั้งเพื่อทำซ้ำในโครงการของคุณและค้นหาแนวทางที่ดีที่สุดในการทำงานให้สำเร็จ!
ทรัพยากรสำหรับการปฏิบัติ:
บทความที่เชื่อมโยงที่นี่สามารถใช้ได้ในกรณีที่คุณต้องการความช่วยเหลือเพิ่มเติมในระหว่างการดำเนินกิจกรรม
เตือนนักเรียนถึงความคาดหวังในการทำงานกลุ่มที่กำหนดไว้ก่อนที่จะเริ่มต้น
แจกบัตรงานขั้นตอนที่ 2 (Google / .docx / .pdf) ให้กับนักเรียนแต่ละคน เตือนนักเรียนว่าเป้าหมายของการขับรถคือการให้แน่ใจว่าทุกคนในกลุ่มพัฒนารูปแบบทางจิตร่วมกันว่าหุ่นยนต์ควรเคลื่อนที่อย่างไรเพื่อให้ทำงานสำเร็จลุล่วง ส่งเสริมให้ผู้เรียนใส่ใจกับวิธีการบันทึกการขับขี่ของตนเอง เนื่องจากพวกเขาจะใช้การฝึกฝนเป็นเอกสารประกอบในการสร้างโค้ดของตน
ขณะที่นักเรียนกำลังขับรถ ให้เดินไปรอบห้องและสอบถามนักเรียนเกี่ยวกับการเรียนรู้ของพวกเขา ถามคำถามเช่น:
- เมื่อคุณขับรถโดยใช้ AI Vision Sensor คุณสังเกตอะไรบ้างเกี่ยวกับการเคลื่อนไหวของหุ่นยนต์เพื่อหยิบถังแต่ละถัง?
- คุณเคยสังเกตเห็นอะไรที่ไม่คาดคิดขณะขับรถหรือไม่? หากเป็นเช่นนั้น การสังเกตดังกล่าวอาจส่งผลต่อการตัดสินใจเขียนโค้ดของคุณอย่างไร
- หากกลุ่มของคุณมีความเห็นไม่ตรงกันว่าควรบันทึกข้อมูลอะไร หรือควรลองเขียนโค้ดเส้นทางใดก่อน คุณจะแก้ไขปัญหานี้อย่างไร
แจกบัตรงานขั้นตอนที่ 3 (Google / .docx / .pdf) ให้กับนักเรียนแต่ละคน หลังจากที่พวกเขาบรรลุเกณฑ์ความสำเร็จในการขับรถ และแบ่งปันเส้นทางที่วางแผนไว้กับคุณ จากนั้นนักศึกษาจะใช้แผนของตนเพื่อสร้างโครงการ VEXcode เบื้องต้น เตือนพวกเขาให้สร้างและทดสอบโครงการของพวกเขาทีละน้อย
ในขณะที่นักเรียนกำลังเขียนโค้ดหุ่นยนต์ ให้เดินไปรอบๆ ห้องและตรวจสอบกับนักเรียนเพื่อหารือเกี่ยวกับความก้าวหน้าและการเรียนรู้ของพวกเขา ถามคำถามเช่น:
- คุณกำลังใช้ AI Vision Dashboard เพื่อช่วยคุณเขียนโค้ดหรือไม่? หากเป็นเช่นนั้นจะทำอย่างไร?
- การเขียนโค้ดโครงการนี้แตกต่างจากการขับรถอย่างไร? มันคล้ายกันยังไงบ้าง?
- แนวคิดที่คุณพัฒนาขึ้นและนำมาปรับใช้กับโครงการการเขียนโค้ดของคุณมีอะไรบ้าง พวกเขาทำงานตามที่คาดหวังหรือเปล่า? ทำไมหรือทำไมไม่?
เมื่อนักเรียนมีโครงการเขียนโค้ดเบื้องต้นที่เสร็จสิ้นงานแล้ว พวกเขาควรดำเนินการไปที่ขั้นตอนที่ 4 และเริ่มทำซ้ำขั้นตอน
- จะเกิดอะไรขึ้นหากคุณต้องการปรับความเร็วหรือความแม่นยำของหุ่นยนต์สำหรับโปรเจ็กต์นี้? กลยุทธ์ใดบ้างที่สามารถช่วยได้?
- คุณสังเกตอะไรบ้างเกี่ยวกับวิธีที่หุ่นยนต์รับรู้สภาพแวดล้อมของพวกมัน? การขับรถทำให้คุณได้ข้อมูลเชิงลึกที่แตกต่างจากการเขียนโค้ดหรือไม่?
- คุณตัดสินใจร่วมกันอย่างไรเกี่ยวกับส่วนต่างๆ ของโครงการที่จะเปลี่ยนแปลง? คุณตกลงกันอย่างไรว่าจะต้องเปลี่ยนแปลงอะไรบ้าง?
สรุป
ตอนนี้คุณได้ฝึกฝนแล้ว ก็ถึงเวลาที่จะแบ่งปันสิ่งที่คุณได้เรียนรู้ ตอบคำถามต่อไปนี้ในสมุดบันทึกของคุณเพื่อช่วยให้คุณสะท้อนการเรียนรู้ของคุณและเตรียมพร้อมสำหรับการอภิปรายทั้งชั้นเรียน:
- การขับเคลื่อนและการเขียนโค้ดหุ่นยนต์ในบทเรียนนี้ช่วยให้คุณเข้าใจได้อย่างไรว่าหุ่นยนต์ใช้เซ็นเซอร์เพื่อรับรู้โลก? อธิบายโดยใช้หลักฐานจากวารสารของคุณ
- คุณคิดว่าบล็อก Get object จะมีประโยชน์มากที่สุดในสถานการณ์ใด
- คุณได้เรียนรู้ข้อมูลอะไรบ้างจาก AI Vision Dashboard ในแท็บ Monitor และช่วยให้คุณเข้าใจสิ่งที่หุ่นยนต์กำลังทำอยู่ได้อย่างไร
- กลยุทธ์การทำงานร่วมกันของคุณมีการเปลี่ยนแปลงตลอดหลักสูตรนี้หรือไม่? หากเป็นเช่นนั้น โปรดอธิบายว่าอย่างไร หากไม่ใช่คุณอยากจะปรับปรุงอะไร?
ตอนนี้คุณได้ฝึกฝนแล้ว ก็ถึงเวลาที่จะแบ่งปันสิ่งที่คุณได้เรียนรู้ ตอบคำถามต่อไปนี้ในสมุดบันทึกของคุณเพื่อช่วยให้คุณสะท้อนการเรียนรู้ของคุณและเตรียมพร้อมสำหรับการอภิปรายทั้งชั้นเรียน:
- การขับเคลื่อนและการเขียนโค้ดหุ่นยนต์ในบทเรียนนี้ช่วยให้คุณเข้าใจได้อย่างไรว่าหุ่นยนต์ใช้เซ็นเซอร์เพื่อรับรู้โลก? อธิบายโดยใช้หลักฐานจากวารสารของคุณ
- คุณคิดว่าบล็อก Get object จะมีประโยชน์มากที่สุดในสถานการณ์ใด
- คุณได้เรียนรู้ข้อมูลอะไรบ้างจาก AI Vision Dashboard ในแท็บ Monitor และช่วยให้คุณเข้าใจสิ่งที่หุ่นยนต์กำลังทำอยู่ได้อย่างไร
- กลยุทธ์การทำงานร่วมกันของคุณมีการเปลี่ยนแปลงตลอดหลักสูตรนี้หรือไม่? หากเป็นเช่นนั้น โปรดอธิบายว่าอย่างไร หากไม่ใช่คุณอยากจะปรับปรุงอะไร?
แนะนำให้นักเรียนแบ่งปันการเรียนรู้ของพวกเขาในการอภิปรายทั้งชั้นเรียน ช่วยให้ผู้เรียนสะท้อนการเรียนรู้ของตนผ่านการปฏิบัติเพื่อบรรจบกันสู่ความเข้าใจร่วมกันหรือเป้าหมายการเรียนรู้
ใช้คำถามที่นักเรียนตอบในสมุดบันทึกของตนเป็นจุดเริ่มต้นของการอภิปราย ถามคำถามติดตามเพื่อชี้แนะความเข้าใจของนักเรียน:
- บนเซ็นเซอร์ AI Vision:
- Dashboard บอกอะไรคุณเกี่ยวกับ AI Vision Sensor? มันไม่ได้บอกอะไรคุณบ้าง? คุณต้องการข้อมูลอื่นใดเกี่ยวกับวัตถุที่ AI Vision Sensor ตรวจจับ?
- วิธีที่เซ็นเซอร์ AI Vision รับรู้โลกแตกต่างจากวิธีที่ดวงตาของคุณมองเห็นโลกอย่างไร?
- คุณคิดว่าดวงตาของคุณมีพลังมากกว่าหรือต่ำกว่า AI Vision Sensor หรือไม่? ทำไม
- ในการเขียนโค้ดด้วยบล็อกแมโคร:
- พฤติกรรมทั้งหมดที่หุ่นยนต์ทำสำเร็จในระหว่างการดำเนินการบล็อก เคลื่อนที่ไปยังวัตถุ หรือบล็อกมาโครใดๆ คืออะไร
- คุณคิดว่าข้อมูลอะไรจากเซ็นเซอร์ที่ถูกนำมาใช้ในบล็อกมาโคร?
- เกี่ยวกับความร่วมมือ:
- ความสามารถในการแก้ไขปัญหาร่วมกันของคุณดีขึ้นอย่างไรบ้าง?
- คุณอยากจะทำอะไรให้ดีขึ้น?
- คุณสามารถดำเนินการอย่างไรเพื่อให้บรรลุเป้าหมายนั้นได้?
กลับไปที่เอกสารที่แชร์ซึ่งคุณสร้างขึ้นระหว่างบทเรียนที่ 1 ซึ่งมีรายการคำถามที่นักเรียนมีเกี่ยวกับ AI Vision Sensor อัปเดตด้วยคำตอบของนักเรียนตามข้อมูลใหม่ที่พวกเขาได้เรียนรู้ในบทเรียนนี้ บันทึกคำถามใหม่ ๆ ที่เกิดขึ้น
เลือก ถัดไป > เพื่อไปยังความท้าทายของหน่วย