
En esta lección, explorará cómo el robot de codificación VEX AIM “ve” su entorno mediante el uso del panel de visión de IA en VEXcode AIM. También se basará en lo que ha aprendido sobre el uso de bloques macro a medida que codifica el robot para entregar barriles a un AprilTag usando el bloque Mover al objeto.
Mire el vídeo a continuación para obtener más información sobre:
- Cómo el sensor de visión de IA percibe su entorno
- Cómo el panel de visión de IA en la pestaña Monitor de VEXcode AIM le permite ver la retroalimentación del sensor en tiempo real.
- Cómo codificar el robot para moverse a un AprilTag usando el bloque Mover al objeto .
Ahora que has visto el vídeo, captura tus pensamientos en tu diario. Responda estas preguntas para guiar su pensamiento y ayudarlo a prepararse para un debate con toda la clase:
- ¿Cómo imagina utilizar el Panel de Visión de IA para ayudarle a codificar su robot utilizando el Sensor de Visión de IA?
- ¿En qué crees que la percepción de los robots es diferente a la percepción humana?
- ¿Cómo crees que será útil el bloque Mover al objeto?
- ¿Qué evidencia tienes del vídeo que apoya tus ideas?
- ¿Qué preguntas tienes después de ver el vídeo? ¿Qué crees que te ayudará a responderlas?
Ahora que has visto el vídeo, captura tus pensamientos en tu diario. Responda estas preguntas para guiar su pensamiento y ayudarlo a prepararse para un debate con toda la clase:
- ¿Cómo imagina utilizar el Panel de Visión de IA para ayudarle a codificar su robot utilizando el Sensor de Visión de IA?
- ¿En qué crees que la percepción de los robots es diferente a la percepción humana?
- ¿Cómo crees que será útil el bloque Mover al objeto?
- ¿Qué evidencia tienes del vídeo que apoya tus ideas?
- ¿Qué preguntas tienes después de ver el vídeo? ¿Qué crees que te ayudará a responderlas?
Después de que los estudiantes vean el video y antes de practicar, se reúnen para una discusión con toda la clase. Utilice las respuestas de los estudiantes a las preguntas proporcionadas como base para la discusión.
Explorar la diferencia entre la forma en que un robot o una computadora ve el mundo y la forma en que los humanos lo ven ayuda a los estudiantes a desarrollar conocimientos fundamentales sobre cómo funciona la IA. Los humanos obtienen información sobre su entorno a través de sus cinco sentidos, mientras que los robots deben usar la retroalimentación de sus sensores para hacerlo. Es importante volver a centrar la atención de los estudiantes en esta exploración a lo largo de esta lección y más allá para que puedan comprender plenamente este concepto clave en IA.
Además, el término “campo de visión” se utiliza para describir el área en la que el sensor de visión IA puede percibir objetos. Introduzca y refuerce este término en la conversación a lo largo de esta lección.
Práctica guiada
Ahora que has visto y comentado el vídeo, ¡es tu turno de practicar!
Paso 1: Configure su campo como se muestra en la imagen a continuación.
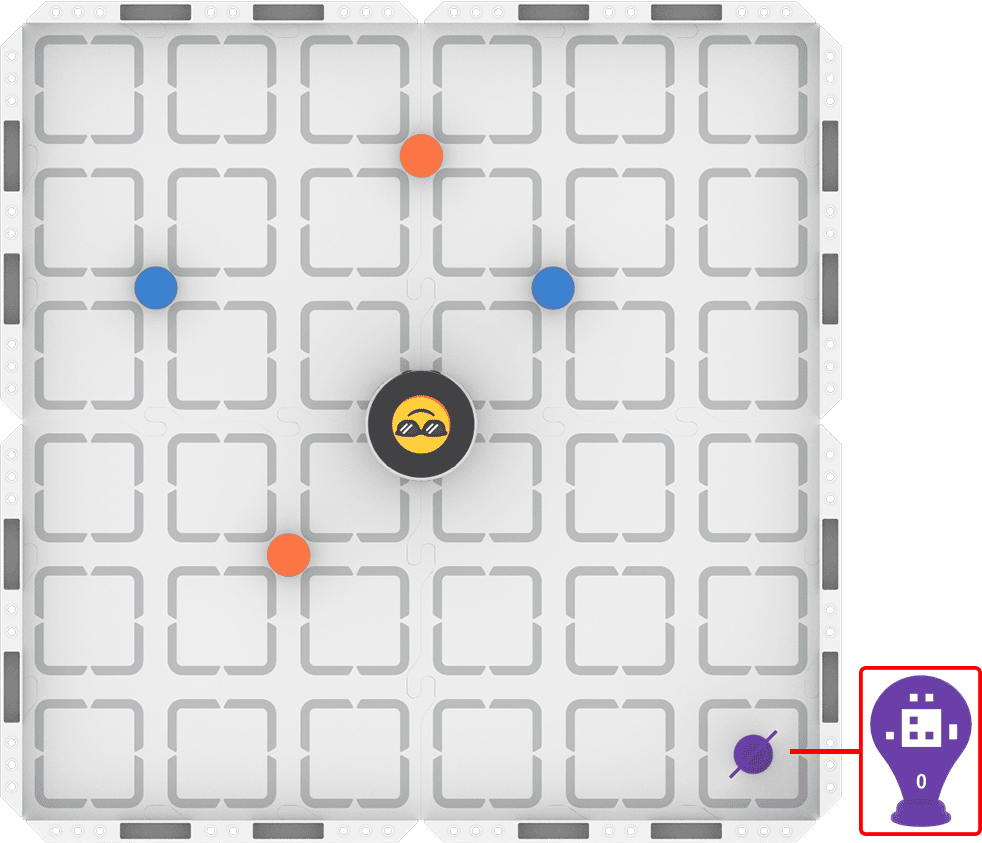
Paso 2: Utilice el modo Conducir para modelar los movimientos que su robot debe realizar para completar la tarea.
- Tu tarea es conducir el robot para recoger cada uno de los cuatro barriles y colocarlos frente a AprilTag ID 0. Documente su conducción y luego planifique cómo codificar ese movimiento.
- Utilice esta tarjeta de tareas (Google / .docx / .pdf) para guiar su práctica.
- Consejo profesional: después de colocar cada barril frente al AprilTag, retírelo del campo con la mano. Esto permite que el sensor de visión de IA tenga el AprilTag en su campo de visión.
Paso 3: Codifique el robot para completar la tarea.
- Su tarea es utilizar el plan de ruta del Paso 2 para codificar el robot para que recoja cada uno de los cuatro barriles y los coloque frente a AprilTag ID 0.
- Utilice esta tarjeta de tareas (Google / .docx / .pdf) para guiar su práctica.
- Consejo profesional: utiliza el Panel de AI Vision en la pestaña Monitor para ayudarte. To learn more about the AI Vision Dashboard, view this article.
Paso 4: ¡Explora! Muévete entre la conducción y la codificación para iterar en tu proyecto y mejorar tu estrategia.
- Junto con su grupo, haga una lluvia de ideas sobre cómo mejorar su proyecto.
- Conduce el robot para probar tus ideas y elige una para comenzar.
- Itere en su proyecto para que coincida con los nuevos comportamientos impulsados.
- ¡Continúe moviéndose entre la conducción y la codificación con frecuencia para iterar en su proyecto y encontrar la mejor estrategia para completar la tarea!
Recursos para la práctica:
Los artículos vinculados aquí están disponibles si necesita ayuda adicional mientras completa la actividad.
Ahora que has visto y comentado el vídeo, ¡es tu turno de practicar!
Paso 1: Configure su campo como se muestra en la imagen a continuación.
Paso 2: Utilice el modo Conducir para modelar los movimientos que su robot debe realizar para completar la tarea.
- Su tarea es conducir el robot para recoger cada uno de los cuatro barriles y colocarlos frente a AprilTag ID 0. Documente su conducción y luego planifique cómo codificar ese movimiento.
- Utilice esta tarjeta de tareas (Google / .docx / .pdf) para guiar su práctica.
- Consejo profesional: después de colocar cada barril frente al AprilTag, retírelo del campo con la mano. Esto permite que el sensor de visión de IA tenga el AprilTag en su campo de visión.
Paso 3: Codifique el robot para completar la tarea.
- Su tarea es utilizar el plan de ruta del Paso 2 para codificar el robot para que recoja cada uno de los cuatro barriles y los coloque frente a AprilTag ID 0.
- Utilice esta tarjeta de tareas (Google / .docx / .pdf) para guiar su práctica.
- Consejo profesional: utiliza el Panel de AI Vision en la pestaña Monitor para ayudarte. To learn more about the AI Vision Dashboard, view this article.
Paso 4: ¡Explora! Muévete entre la conducción y la codificación para iterar en tu proyecto y mejorar tu estrategia.
- Junto con su grupo, haga una lluvia de ideas sobre cómo mejorar su proyecto.
- Conduce el robot para probar tus ideas y elige una para empezar.
- Itere en su proyecto para que coincida con los nuevos comportamientos impulsados.
- ¡Continúe moviéndose entre la conducción y la codificación con frecuencia para iterar en su proyecto y encontrar la mejor estrategia para completar la tarea!
Recursos para la práctica:
Los artículos vinculados aquí están disponibles si necesita ayuda adicional mientras completa la actividad.
Recuerde a los estudiantes las expectativas de trabajo en grupo establecidas antes de comenzar.
Distribuya la tarjeta de tareas del Paso 2 (Google / .docx / .pdf) a cada estudiante. Recuerde a los estudiantes que el objetivo de la conducción es garantizar que todos en el grupo desarrollen un modelo mental compartido de cómo debe moverse el robot para completar la tarea con éxito. Anime a los estudiantes a ser conscientes de cómo documentan su conducción, ya que utilizarán su práctica como documentación para desarrollar su código.
Mientras los estudiantes conducen, circula por el salón y verifica con los estudiantes cómo están aprendiendo. Haga preguntas como:
- Cuando conduces usando el sensor de visión de IA, ¿qué observas sobre cómo se mueve el robot para recoger cada barril?
- ¿Has observado algo inesperado mientras conduces? Si es así, ¿cómo podría esa observación afectar sus decisiones de codificación?
- Si su grupo no está de acuerdo sobre qué documentar o qué camino intentar primero al codificar, ¿cómo lo resuelven?
Distribuya la tarjeta de tareas del Paso 3 (Google / .docx / .pdf) a cada estudiante después de que hayan cumplido con los criterios de éxito para conducir y hayan compartido con usted su ruta planificada. Luego, los estudiantes usarán su plan para construir sus proyectos VEXcode iniciales. Recuérdeles que deben construir y probar sus proyectos de forma incremental.
Mientras los estudiantes codifican el robot, circula por el salón y consulta con ellos para hablar sobre su progreso y aprendizaje. Haga preguntas como:
- ¿Estás utilizando el panel de AI Vision para ayudarte a codificar? Si es así ¿cómo?
- ¿En qué se diferencia codificar este proyecto de conducirlo? ¿En qué es similar?
- ¿Qué ideas que desarrollaste mientras conducías has aplicado a tu proyecto de codificación? ¿Funcionaron como se esperaba? ¿Por qué o por qué no?
Una vez que los estudiantes tengan un proyecto de codificación inicial que complete la tarea, deben pasar al Paso 4 y comenzar a iterar.
- ¿Qué pasaría si necesitaras ajustar la velocidad o precisión de tu robot para este proyecto? ¿Qué estrategias podrían ayudar?
- ¿Qué estás notando acerca de cómo los robots perciben sus entornos? ¿Conducir te proporciona conocimientos diferentes a programar?
- ¿Cómo estás tomando decisiones colaborativas sobre qué partes de tu proyecto cambiar? ¿Cómo se ponen de acuerdo sobre qué cambio realizar?
Resumen
Ahora que has practicado, es hora de compartir lo aprendido. Responda las siguientes preguntas en su diario para ayudarle a reflexionar sobre su aprendizaje y prepararse para una discusión con toda la clase:
- ¿Cómo te ha ayudado conducir y codificar el robot en esta lección a comprender cómo los robots usan sensores para percibir el mundo? Explique utilizando evidencia de su diario.
- ¿En qué situaciones crees que el bloque Obtener objeto sería más útil?
- ¿Qué información aprendió del Panel de Visión de IA en la pestaña Monitor y cómo lo ayudó a comprender lo que estaba haciendo el robot?
- ¿Han cambiado tus estrategias de colaboración a lo largo de este curso? Si es así, explique cómo. Si no, ¿qué te gustaría mejorar?
Ahora que has practicado, es hora de compartir lo aprendido. Responda las siguientes preguntas en su diario para ayudarle a reflexionar sobre su aprendizaje y prepararse para una discusión con toda la clase:
- ¿Cómo te ha ayudado conducir y codificar el robot en esta lección a comprender cómo los robots usan sensores para percibir el mundo? Explique utilizando evidencia de su diario.
- ¿En qué situaciones crees que el bloque Obtener objeto sería más útil?
- ¿Qué información aprendió del Panel de Visión de IA en la pestaña Monitor y cómo lo ayudó a comprender lo que estaba haciendo el robot?
- ¿Han cambiado tus estrategias de colaboración a lo largo de este curso? Si es así, explique cómo. Si no, ¿qué te gustaría mejorar?
Guíe a los estudiantes para que compartan su aprendizaje en una discusión con toda la clase. Ayudar a los estudiantes a reflexionar sobre su aprendizaje a través de la práctica para converger en entendimientos compartidos o objetivos de aprendizaje.
Utilice las preguntas que los estudiantes respondieron en sus diarios como punto de partida para la discusión. Haga preguntas de seguimiento para guiar la comprensión de los estudiantes:
- Sobre el sensor de visión IA:
- ¿Qué te dice el Dashboard sobre el sensor de visión IA? ¿Qué no te dice? ¿Qué otra información le gustaría tener sobre los objetos que detecta el sensor de visión IA?
- ¿En qué se diferencia la forma en que el sensor de visión de IA percibe el mundo de la forma en que lo ven tus ojos
- ¿Crees que tus ojos son más o menos potentes que el sensor de visión IA? ¿Por qué?
- Sobre la codificación con bloques macro:
- ¿Cuáles son todos los comportamientos que completa el robot durante la ejecución de un bloque Mover al objeto o cualquier macrobloque?
- ¿Qué datos del sensor crees que se están utilizando en el bloque macro?
- Sobre la colaboración:
- ¿Cómo ha mejorado tu capacidad para resolver problemas de forma colaborativa?
- ¿Qué te gustaría hacer mejor?
- ¿Qué pasos podría usted dar para alcanzar ese objetivo?
Regrese al documento compartido que creó durante la Lección 1 que enumera las preguntas que los estudiantes tienen sobre el sensor de visión de IA. Actualícelo con las respuestas de los estudiantes según la nueva información que han aprendido durante esta lección. Registre cualquier pregunta nueva que haya surgido.
Seleccione Siguiente > para pasar al desafío de unidad.