
V této lekci prozkoumáte, jak kódovací robot VEX AIM „vidí“ své prostředí, a to pomocí řídicího panelu AI Vision ve VEXcode AIM. Také si procvičíte, co jste se naučili o používání makrobloků, při kódování robota pro doručování sudů do objektu AprilTag pomocí bloku Move to object.
Podívejte se na video níže a dozvíte se více o:
- Jak AI Vision Sensor vnímá své okolí
- Jak vám řídicí panel AI Vision na kartě Monitor v aplikaci VEXcode AIM umožňuje sledovat zpětnou vazbu ze senzorů v reálném čase.
- Jak naprogramovat robota pro přesun na objekt AprilTag pomocí bloku Move to object .
Nyní, když jste si video prohlédli, si zaznamenejte své myšlenky do deníku. Odpovězte na tyto otázky, které vám pomohou usměrnit vaše myšlení a připravit se na diskusi s celou třídou:
- Jak si představujete použití řídicího panelu AI Vision k naprogramování robota pomocí senzoru AI Vision?
- Jak si myslíte, že se vnímání robotů liší od lidského vnímání?
- Jak si myslíte, že bude blok Move to object užitečný?
- Jaké důkazy z videa podporujete ve svých myšlenkách?
- Jaké otázky máte po zhlédnutí videa? Co si myslíte, že vám pomůže na ně odpovědět?
Nyní, když jste si video prohlédli, si zaznamenejte své myšlenky do deníku. Odpovězte na tyto otázky, které vám pomohou usměrnit vaše myšlení a připravit se na diskusi s celou třídou:
- Jak si představujete použití řídicího panelu AI Vision k naprogramování robota pomocí senzoru AI Vision?
- Jak si myslíte, že se vnímání robotů liší od lidského vnímání?
- Jak si myslíte, že bude blok Move to object užitečný?
- Jaké důkazy z videa podporujete ve svých myšlenkách?
- Jaké otázky máte po zhlédnutí videa? Co si myslíte, že vám pomůže na ně odpovědět?
Poté, co si studenti shlédnou video a před procvičováním, se sejděte k diskusi s celou třídou. Použijte odpovědi studentů na zadané otázky jako základ pro diskusi.
Zkoumání rozdílu mezi způsobem, jakým robot nebo počítač vidí svět, a způsobem, jakým ho vidí lidé, pomáhá studentům rozvíjet základní znalosti o fungování umělé inteligence. získávají informace o svém okolí prostřednictvím svých pěti smyslů, zatímco roboti k tomu musí používat zpětnou vazbu ze senzorů. Je důležité v průběhu této lekce i po ní znovu zaměřit pozornost studentů na toto zkoumání, aby mohli plně porozumět tomuto klíčovému konceptu umělé inteligence.
Termín „zorné pole“ se navíc používá k popisu oblasti, ve které dokáže senzor s umělou inteligencí vnímat objekty. V průběhu této lekce tento pojem představte a prohlubujte v konverzaci.
Řízená praxe
Teď, když jste si video prohlédli a probrali, je řada na vás, abyste si procvičili!
Krok 1: Nastavte si pole, jak je znázorněno na obrázku níže.
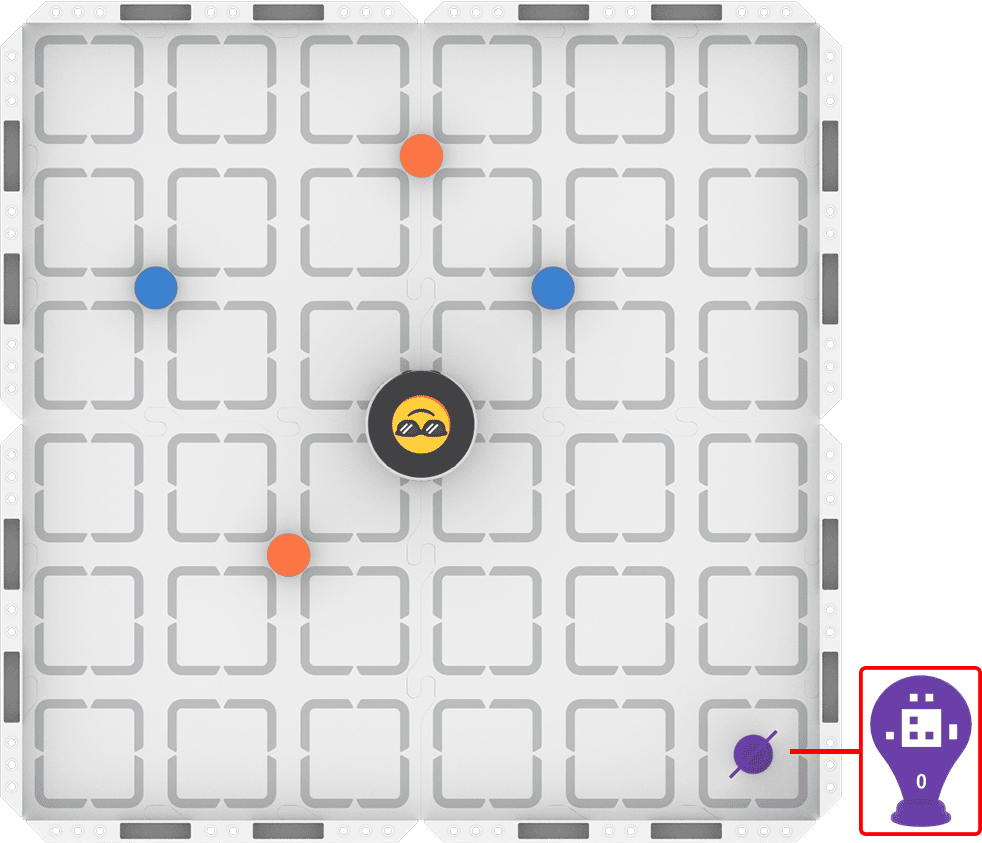
Krok 2: Použijte režim Pohon k modelování pohybů, které musí váš robot provést k dokončení úkolu.
- Vaším úkolem je řídit robota tak, aby zvedl každý ze čtyř sudů a umístil je před AprilTag ID 0. Zdokumentujte si řízení a poté si naplánujte, jak tento pohyb kódovat.
- Použijte tuto kartu s úkolem (Google / .docx / .pdf) jako vodítko pro váš procvičovací postup.
- Tip pro profesionály: Po umístění každého sudu před AprilTag jej ručně odstraňte z pole. Díky tomu má senzor AI Vision Sensor ve svém zorném poli AprilTag.
Krok 3: Naprogramujte robota tak, aby dokončil úkol.
- Vaším úkolem je pomocí plánu cesty z kroku 2 naprogramovat robota, který zvedne každý ze čtyř sudů a umístí je před AprilTag ID 0.
- Použijte tuto kartu s úkolem (Google / .docx / .pdf) jako vodítko pro váš procvičovací postup.
- Tip pro profesionály: Použijte k tomu řídicí panel AI Vision na kartě Monitor. Chcete-li se dozvědět více o řídicím panelu AI Vision, si tento.
Krok 4: Prozkoumejte! Přecházejte mezi řízením a kódováním, abyste mohli iterovat na svém projektu a vylepšovat svou strategii.
- Společně se svou skupinou vymyslete způsoby, jak vylepšit svůj projekt.
- Otestuj si své nápady s robotem a jeden si vyber.
- Iterujte na svém projektu tak, aby odpovídal novým řízeným chováním.
- Neustále střídejte řízení a programování, abyste mohli svůj projekt opakovat a najít nejlepší strategii k jeho dokončení!
Zdroje pro praxi:
Pokud budete při provádění aktivity potřebovat další podporu, jsou k dispozici články, na které zde odkazujeme.
Teď, když jste si video prohlédli a probrali, je řada na vás, abyste si procvičili!
Krok 1: Nastavte si pole, jak je znázorněno na obrázku níže.
Krok 2: Použijte režim Pohon k modelování pohybů, které musí váš robot provést k dokončení úkolu.
- Vaším úkolem je řídit robota tak, aby zvedl každý ze čtyř sudů a umístil je před AprilTag ID 0. Zdokumentujte si řízení a poté si naplánujte, jak tento pohyb kódovat.
- Použijte tuto kartu s úkolem (Google / .docx / .pdf) jako vodítko pro váš procvičovací postup.
- Tip pro profesionály: Po umístění každého sudu před AprilTag jej ručně odstraňte z pole. Díky tomu má senzor AI Vision Sensor ve svém zorném poli AprilTag.
Krok 3: Naprogramujte robota tak, aby dokončil úkol.
- Vaším úkolem je pomocí plánu cesty z kroku 2 naprogramovat robota, který zvedne každý ze čtyř sudů a umístí je před AprilTag ID 0.
- Použijte tuto kartu s úkolem (Google / .docx / .pdf) jako vodítko pro váš procvičovací postup.
- Tip pro profesionály: Použijte k tomu řídicí panel AI Vision na kartě Monitor. Chcete-li se dozvědět více o řídicím panelu AI Vision, si tento.
Krok 4: Prozkoumejte! Přecházejte mezi řízením a kódováním, abyste mohli iterovat na svém projektu a vylepšovat svou strategii.
- Společně se svou skupinou vymyslete způsoby, jak vylepšit svůj projekt.
- Otestuj si své nápady s robotem a jeden si vyber.
- Iterujte na svém projektu tak, aby odpovídal novým řízeným chováním.
- Neustále střídejte řízení a programování, abyste mohli svůj projekt opakovat a najít nejlepší strategii k jeho dokončení!
Zdroje pro praxi:
Pokud budete při provádění aktivity potřebovat další podporu, jsou k dispozici články, na které zde odkazujeme.
Před zahájením práce ve skupině studentům připomeňte jejich stanovená očekávání.
Rozdejte každému studentovi kartu s úkolem z kroku 2 č. (Google / .docx / .pdf). Připomeňte studentům, že cílem řízení je zajistit, aby si všichni ve skupině vytvořili společný mentální model toho, jak by se měl robot pohybovat, aby úkol úspěšně splnil. Povzbuďte studenty, aby si dávali pozor na to, jak dokumentují svá řízení, protože tuto praxi použijí jako dokumentaci k tvorbě vlastního kódu.
Během jízdy studentů se pohybujte po místnosti a informujte se s nimi o tom, jak se učí. Ptejte se na otázky typu:
- Když řídíte s využitím senzoru AI Vision Sensor, čeho si všímáte na tom, jak se robot pohybuje, aby zvedl každý sud?
- Všimli jste si během jízdy něčeho neočekávaného? Pokud ano, jak by toto pozorování mohlo ovlivnit vaše rozhodnutí v oblasti kódování?
- Pokud se vaše skupina neshodne na tom, co dokumentovat nebo jakou cestu při kódování zkusit jako první, jak to řešíte?
Rozdejte každému studentovi kartu s úkolem 1 z kroku (Google / .docx / .pdf) poté, co splní kritéria úspěšnosti pro řízení a podělí se s vámi o svou plánovanou trasu. Studenti poté použijí svůj plán k vytvoření svých prvních projektů VEXcode. Připomeňte jim, aby své projekty vytvářeli a testovali postupně.
Zatímco studenti programují robota, procházejte místností a informujte se s nimi o jejich pokroku a učení. Ptejte se na otázky typu:
- Používáte řídicí panel AI Vision, který vám pomáhá s kódováním? Pokud ano, jak?
- Jak se programování v tomto projektu liší od řízení? V čem je to podobné?
- Jaké nápady, které jste si osvojili během řízení, jste aplikovali ve svém programátorském projektu? Fungovaly podle očekávání? Proč ano nebo proč ne?
Jakmile mají studenti úvodní kódovací projekt, který dokončí úkol, měli by přejít ke kroku 4 a začít iterovat.
- Co kdybyste pro tento projekt potřebovali upravit rychlost nebo přesnost robota? Jaké strategie by mohly pomoci?
- Čeho si všímáte na tom, jak roboti vnímají své prostředí? Dává vám řízení jiné poznatky než programování?
- Jakým způsobem spolupracujete na rozhodování o tom, které části projektu změnit? Jak se shodujete na tom, jakou změnu provést?
Shrnutí
Teď, když jste si to procvičili, je čas podělit se o to, co jste se naučili. Odpovězte na následující otázky ve svém deníku, které vám pomohou zamyslet se nad svými vědomostmi a připravit se na diskusi s celou třídou:
- Jak vám řízení a programování robota v této lekci pomohlo pochopit, jak roboti používají senzory k vnímání světa? Vysvětlete s využitím důkazů z vašeho deníku.
- V jakých situacích si myslíte, že by byl blok Get object nejužitečnější?
- Jaké informace jste získali z řídicího panelu AI Vision na kartě Monitor a jak vám pomohly pochopit, co robot dělal?
- Změnily se během tohoto kurzu vaše strategie spolupráce? Pokud ano, vysvětlete jak. Pokud ne, co byste chtěl/a zlepšit?
Teď, když jste si to procvičili, je čas podělit se o to, co jste se naučili. Odpovězte na následující otázky ve svém deníku, které vám pomohou zamyslet se nad svými vědomostmi a připravit se na diskusi s celou třídou:
- Jak vám řízení a programování robota v této lekci pomohlo pochopit, jak roboti používají senzory k vnímání světa? Vysvětlete s využitím důkazů z vašeho deníku.
- V jakých situacích si myslíte, že by byl blok Get object nejužitečnější?
- Jaké informace jste získali z řídicího panelu AI Vision na kartě Monitor a jak vám pomohly pochopit, co robot dělal?
- Změnily se během tohoto kurzu vaše strategie spolupráce? Pokud ano, vysvětlete jak. Pokud ne, co byste chtěl/a zlepšit?
Veďte studenty ke sdílení svých znalostí v diskusi s celou třídou. Pomozte studentům reflektovat své učení prostřednictvím praxe, aby se sblížili na sdíleném porozumění nebo vzdělávacích cílech.
Jako výchozí bod pro diskusi použijte otázky, na které studenti odpověděli ve svých denících. Pokládejte doplňující otázky, které studentům pomohou porozumět textu:
- Na senzoru AI Vision:
- Co vám Dashboard říká o senzoru AI Vision? Co vám to neříká? Jaké další informace byste chtěli mít o objektech, které detekuje senzor AI Vision?
- Jak se liší způsob, jakým vnímá svět senzor AI Vision, od způsobu, jakým svět vidí vaše oči?
- Myslíte si, že vaše oči jsou více nebo méně výkonné než senzor AI Vision? Proč?
- O kódování s makrobloky:
- Jaké všechny funkce robot provede během provádění bloku Přesun k objektu nebo jakéhokoli makrobloku?
- Jaká data ze senzoru se podle vás používají v makrobloku?
- O spolupráci:
- Jak se zlepšila vaše schopnost řešit problémy společně?
- Co byste chtěl/a dělat lépe?
- Jaké kroky byste mohli podniknout k dosažení tohoto cíle?
Vraťte se ke sdílenému dokumentu, který jste vytvořili během 1. lekce a který obsahuje seznam otázek studentů ohledně senzoru s umělou inteligencí. Aktualizujte jej o odpovědi studentů na základě nových informací, které se v této hodině naučili. Zaznamenejte si všechny nově vyvstalé otázky.
Vyberte Další > a přejděte k Výzvě jednotek.