
الدرس 3: إدخال مستشعر متعدد
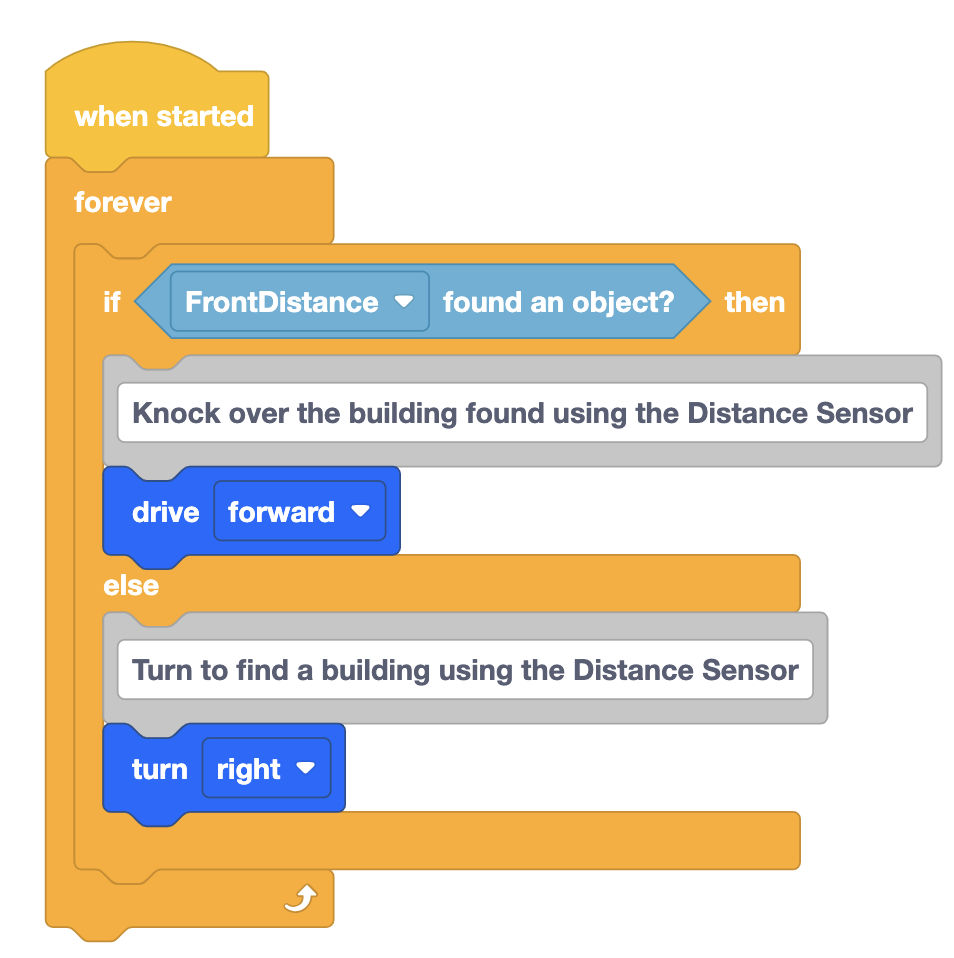
في الدرس السابق، تم استخدام مستشعر المسافة لتحديد ما إذا كان روبوت الواقع الافتراضي قد اكتشف كائنًا أم لا، وإذا كان الأمر كذلك، فقد توجه إلى الأمام نحو الكائن. ومع ذلك، لم يتم استخدام قيم المستشعر لتحديد ما إذا كان روبوت الواقع الافتراضي قريبًا من حافة الملعب لإيقافه. إن إيقاف روبوت الواقع الافتراضي عندما يكون قريبًا من حافة الملعب سيمنعه من القيادة بعيدًا عن الجانب.
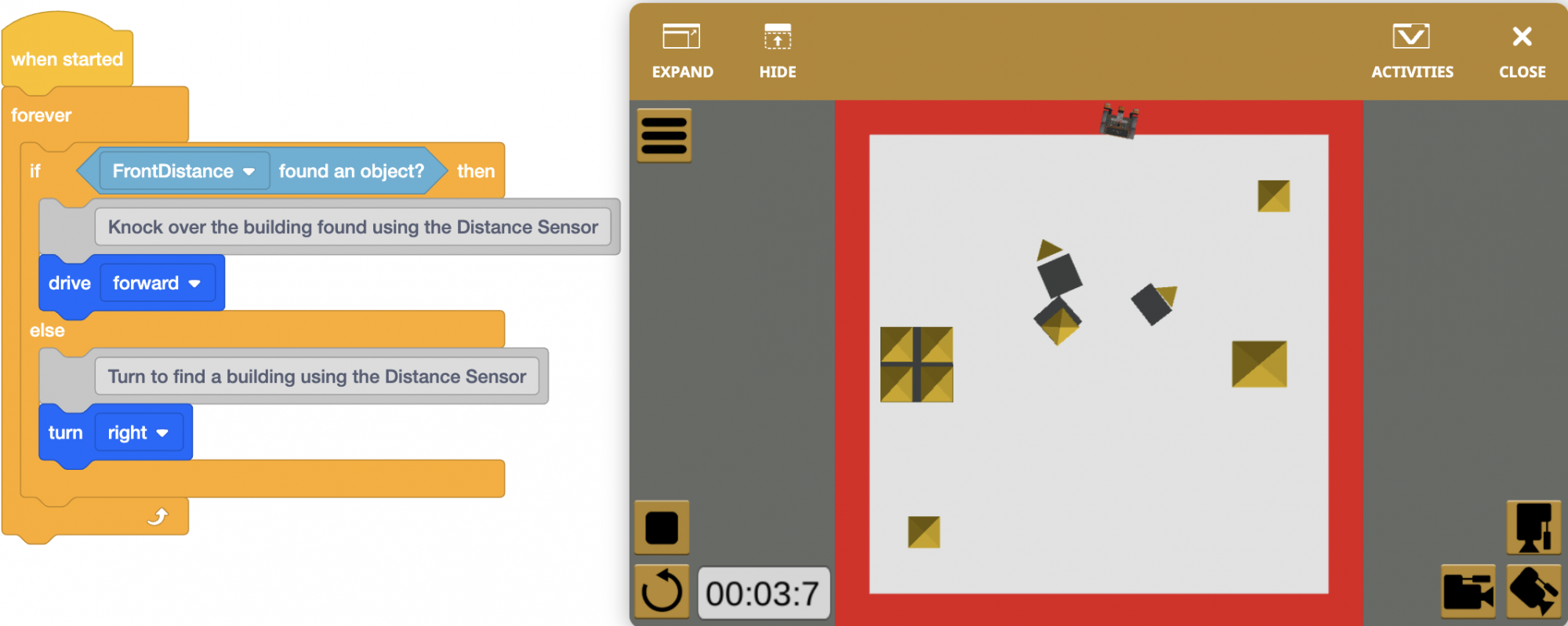
كما هو، يكرر المشروع سلوكيات القيادة إلى الأمام والانعطاف، إلى الأبد. ومع ذلك، لا يوجد شرط للتحقق من الحدود الحمراء حول الملعب. وبالتالي، يمكن أن يسقط روبوت الواقع الافتراضي من الملعب عند القيادة للأمام.
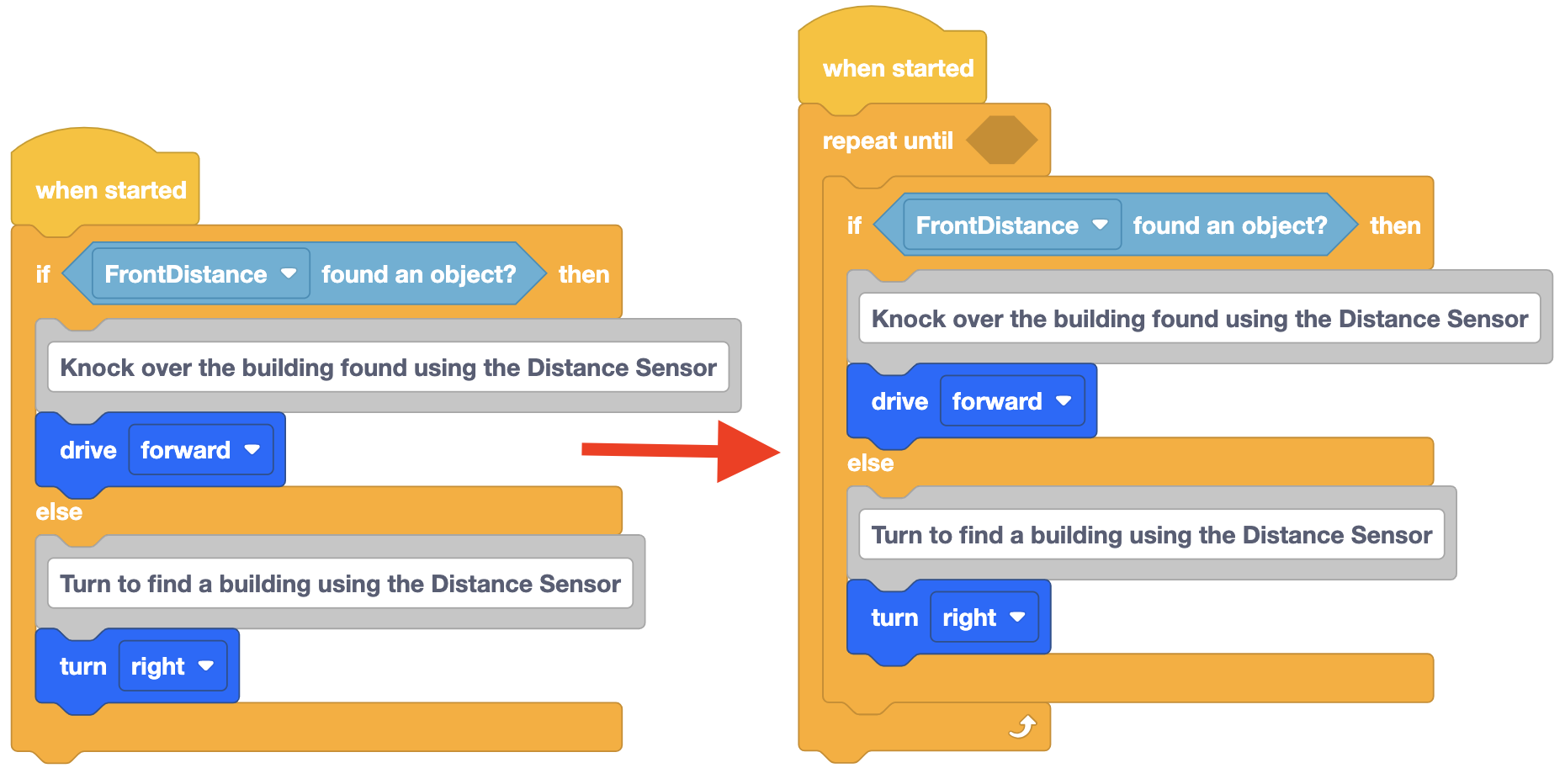
هناك حاجة إلى مستشعر آخر حتى يتمكن روبوت الواقع الافتراضي من تحديد ما إذا كان قريبًا من حافة الملعب أم لا. تحتاج سلوكيات القيادة للأمام والانعطاف إلى التكرار فقط حتى يتم اكتشاف الحدود الحمراء. وبالتالي، يمكن استبدال كتلة [Forever] بكتلة [Repeat till]، من أجل تكرار سلوكيات القيادة للأمام والانعطاف حتى يتم استيفاء شرط اكتشاف الحد الأحمر. يمكن استخدام مستشعر العين السفلية لتحديد ما إذا كان روبوت الواقع الافتراضي قريبًا من حافة الملعب من خلال اكتشاف الحدود الحمراء حول الملعب.

- تحميل مشروع Unit9Lesson2 من الدرس السابق.
- إعادة تسمية المشروع Unit9Lesson3.

- هناك حاجة إلى حاجز لفحص مستشعر العين السفلي باستمرار. سيحتاج روبوت الواقع الافتراضي إلى تكرار هذه السلوكيات حتى يكتشف مستشعر العين السفلية اللون الأحمر. أولاً، قم بإزالة كتلة [Forever].
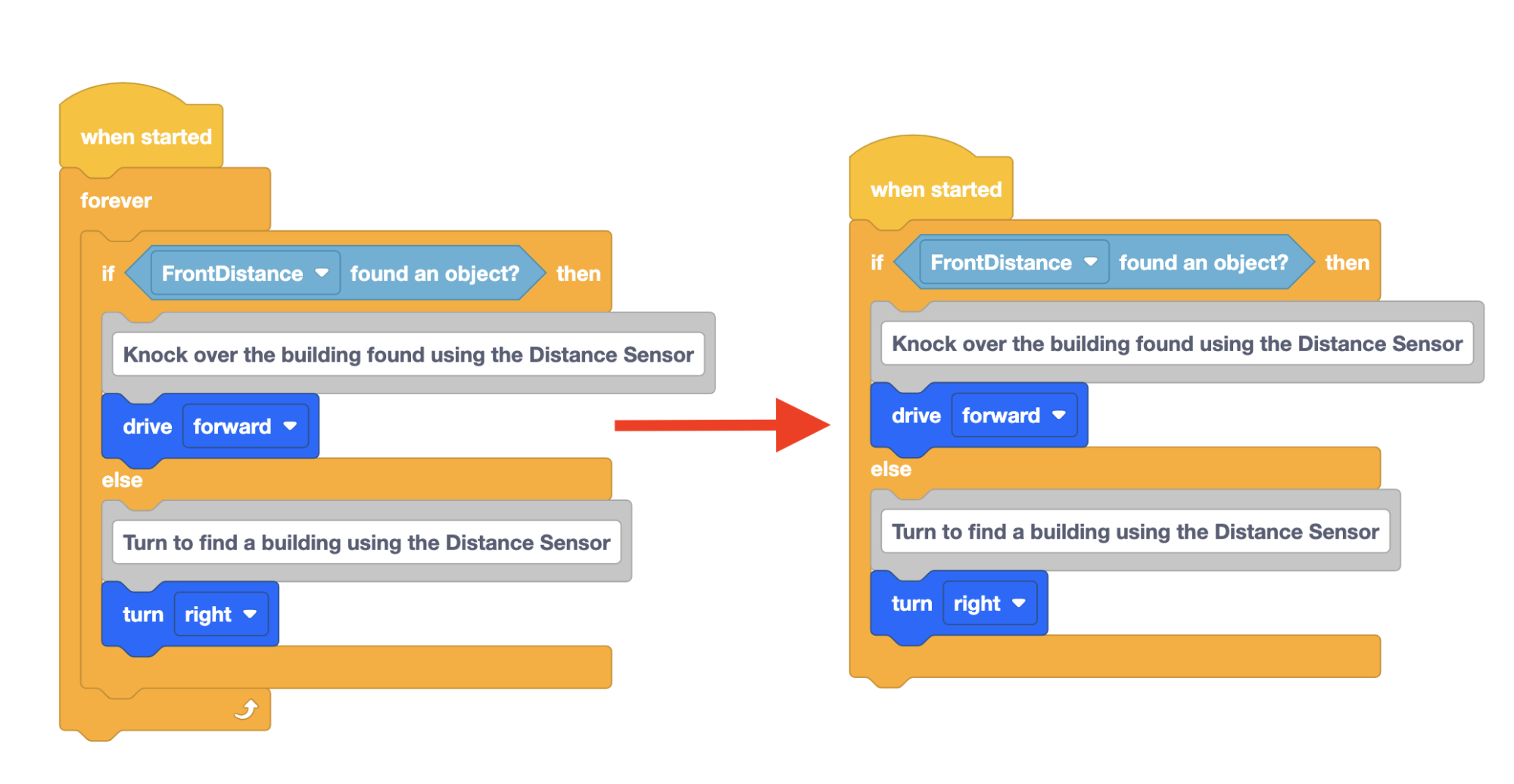
- أضف كتلة [Repeat until] (تكرار حتى).
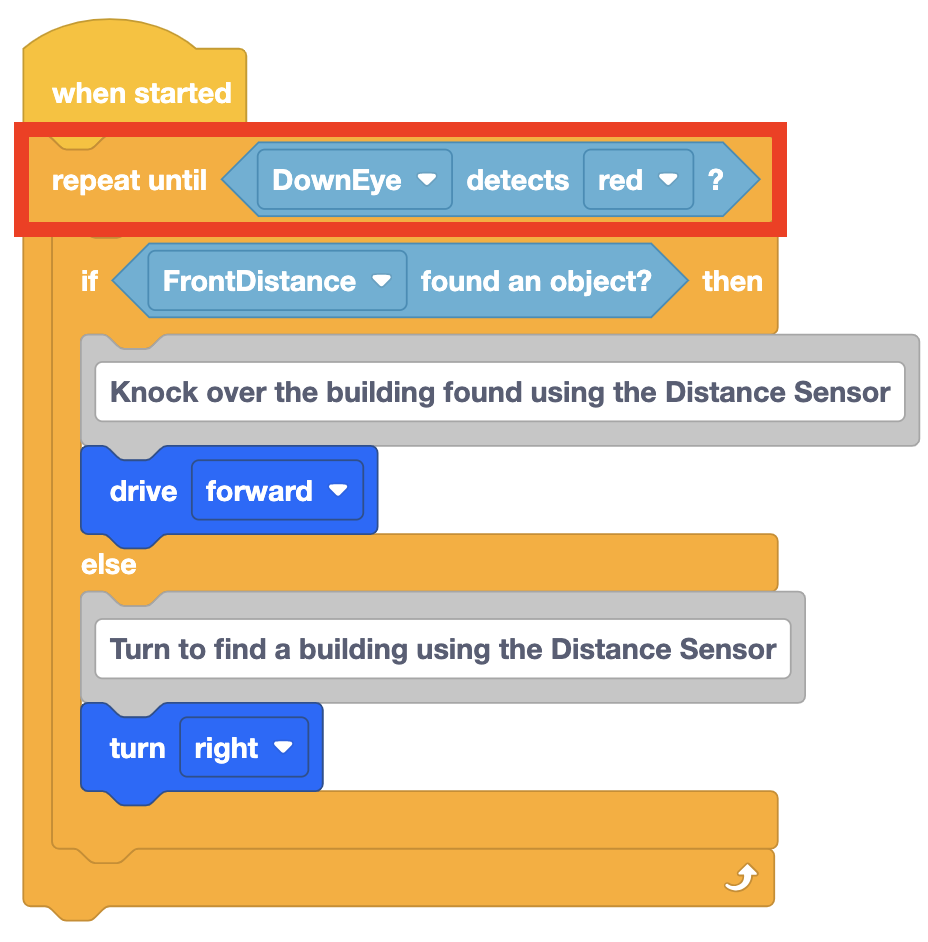
- أضف <Color sensing> كتلة داخل كتلة [Repeat until] واضبط المعلمات على "DownEye" للكشف عن "RED".
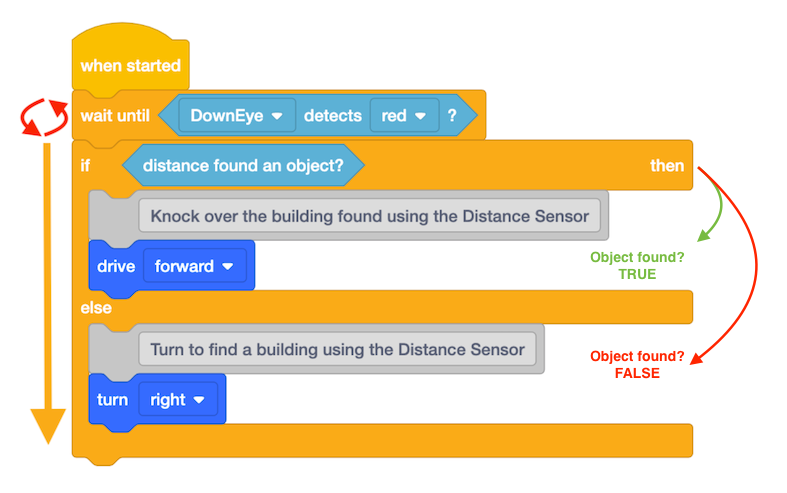
يتم استخدام كتلة [Repeat until] بدلاً من كتلة [Wait until] في هذا المشروع. وذلك لأن كتلة [انتظر حتى] هي كتلة انتظار ستوقف تدفق المشروع مؤقتًا حتى يتم استيفاء الشرط. إذا تم استخدام كتلة [انتظر حتى]، فلن يتم تنفيذ كتلة [إذا كان الأمر كذلك] حتى يتم استيفاء شرط [انتظر حتى] وسيتم تنفيذ كتلة [إذا كان الأمر كذلك] مرة واحدة فقط.
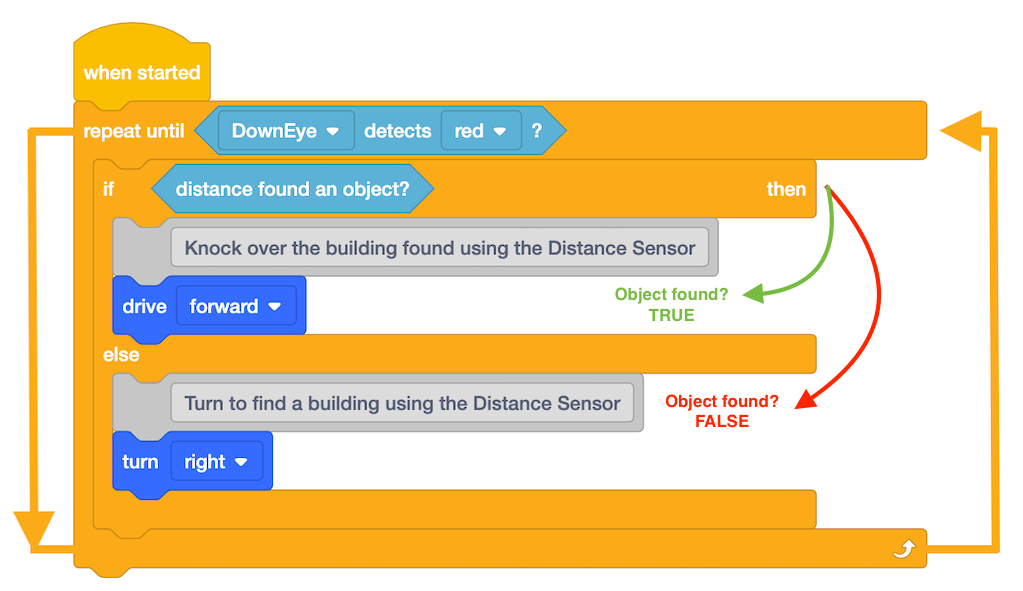
باستخدام كتلة [Repeat until]، يتم التحقق من الشرط [If then else] وتنفيذه باستمرار.
- أضف تعليقًا لتدوين الغرض من استخدام كتلة [Repeat until].

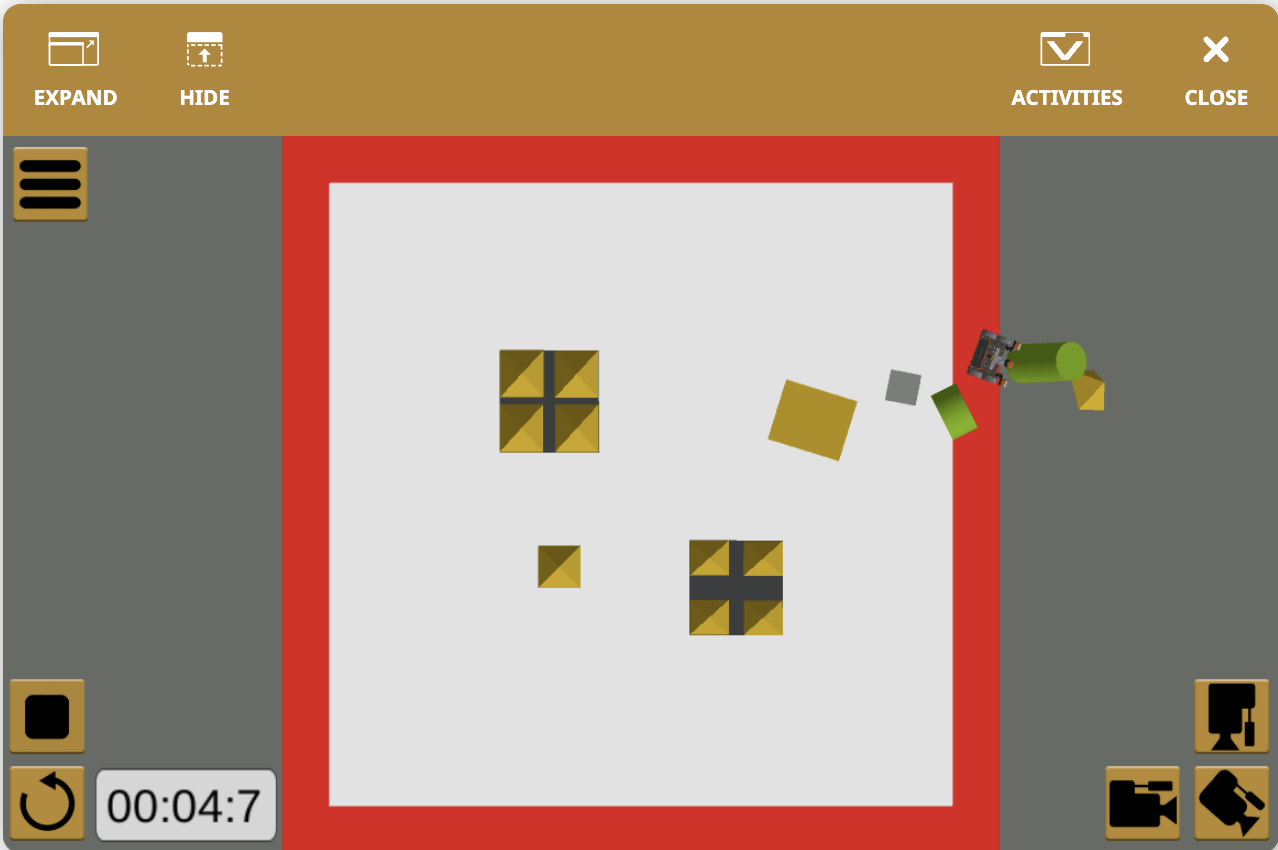
- افتح ملعب Dynamic Castle Crasher وقم بتشغيل المشروع.
-
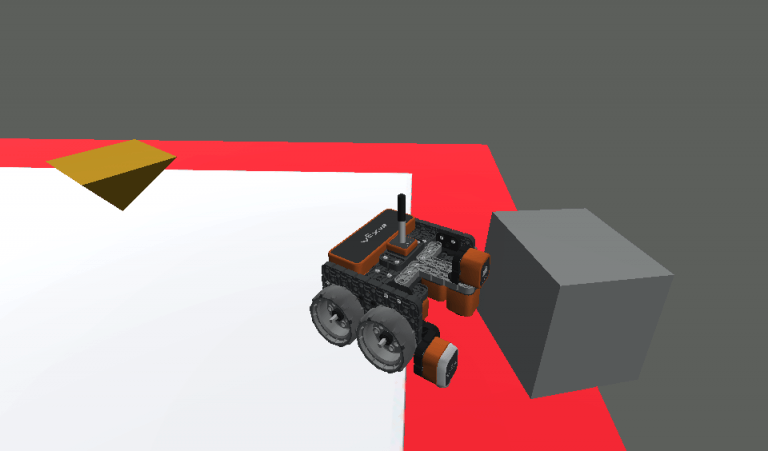
عند تشغيل هذا المشروع، سيقود روبوت الواقع الافتراضي نحو كائن تم اكتشافه وينعطف يمينًا بخلاف ذلك. ومع ذلك، على الرغم من أن مستشعر العين السفلية يبحث عن الحدود الحمراء، إلا أنه لا يتم إخبار روبوت الواقع الافتراضي بما يجب فعله بمجرد اكتشافه للأحمر، لذلك يستمر في القيادة ويسقط في النهاية من الملعب.
بمجرد استيفاء شرط كتلة [Repeat until]، سيتم تنفيذ تدفق المشروع من كتلة [Repeat until].
قم بتحديد زر التالي للمتابعة مع بقية هذا الدرس.