
पाठ 3: एकाधिक सेंसर इनपुट
पिछले पाठ में, दूरी सेंसर का उपयोग यह निर्धारित करने के लिए किया गया था कि क्या वीआर रोबोट ने किसी वस्तु का पता लगाया है या नहीं, और यदि हां, तो क्या वह वस्तु की ओर आगे बढ़ता है। हालाँकि, यह निर्धारित करने के लिए किसी सेंसर मान का उपयोग नहीं किया गया कि क्या वीआर रोबोट खेल के मैदान के किनारे के करीब था ताकि उसे रोका जा सके। जब वीआर रोबोट खेल के मैदान के किनारे के करीब हो तो उसे रोकने से वह किनारे से दूर नहीं जाएगा।
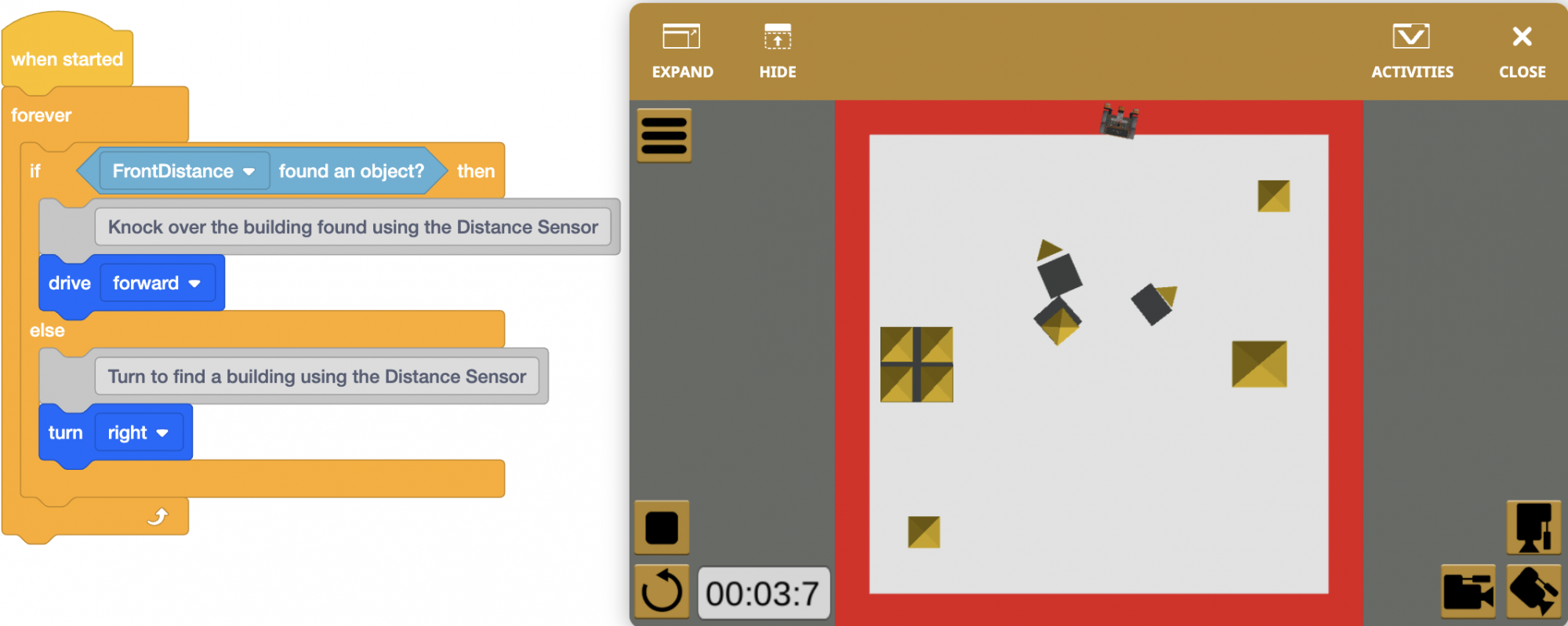
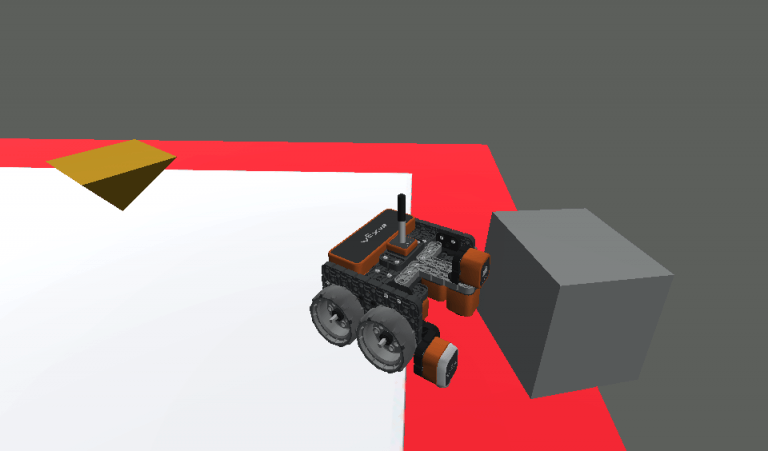
जैसा कि है, यह परियोजना हमेशा आगे बढ़ने और मुड़ने के व्यवहार को दोहराती है। हालाँकि, खेल के मैदान के चारों ओर लाल बॉर्डर की जाँच करने की कोई शर्त नहीं है। इस प्रकार, आगे बढ़ते समय वीआर रोबोट खेल के मैदान से गिर सकता है।
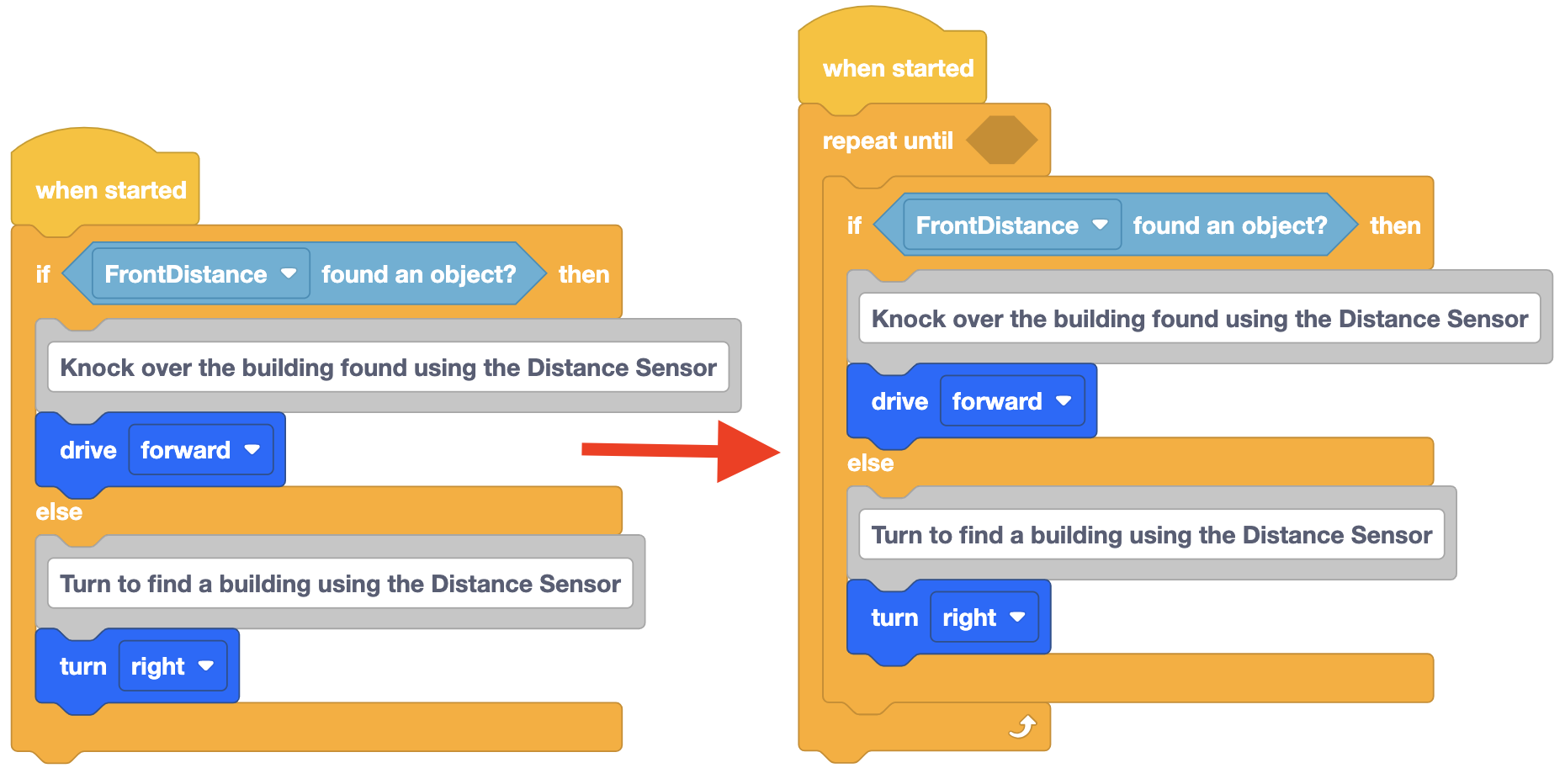
वीआर रोबोट को यह निर्धारित करने के लिए एक अन्य सेंसर की आवश्यकता है कि वह खेल के मैदान के किनारे के करीब है या नहीं। आगे बढ़ने और मुड़ने की क्रियाएं तब तक दोहराई जानी चाहिए जब तक कि लाल बॉर्डर का पता न चल जाए। इस प्रकार, [हमेशा] ब्लॉक को [दोहराएँ जब तक] ब्लॉक से प्रतिस्थापित किया जा सकता है, ताकि लाल बॉर्डर का पता लगाने की स्थिति पूरी होने तक आगे बढ़ने और मुड़ने के व्यवहार को दोहराया जा सके। डाउन आई सेंसर का उपयोग यह निर्धारित करने के लिए किया जा सकता है कि क्या वीआर रोबोट खेल के मैदान के चारों ओर लाल बॉर्डर का पता लगाकर खेल के मैदान के किनारे के करीब है।

- पिछले पाठ से Unit9Lesson2 प्रोजेक्ट लोड करें।
- प्रोजेक्ट का नाम बदलें Unit9Lesson3.

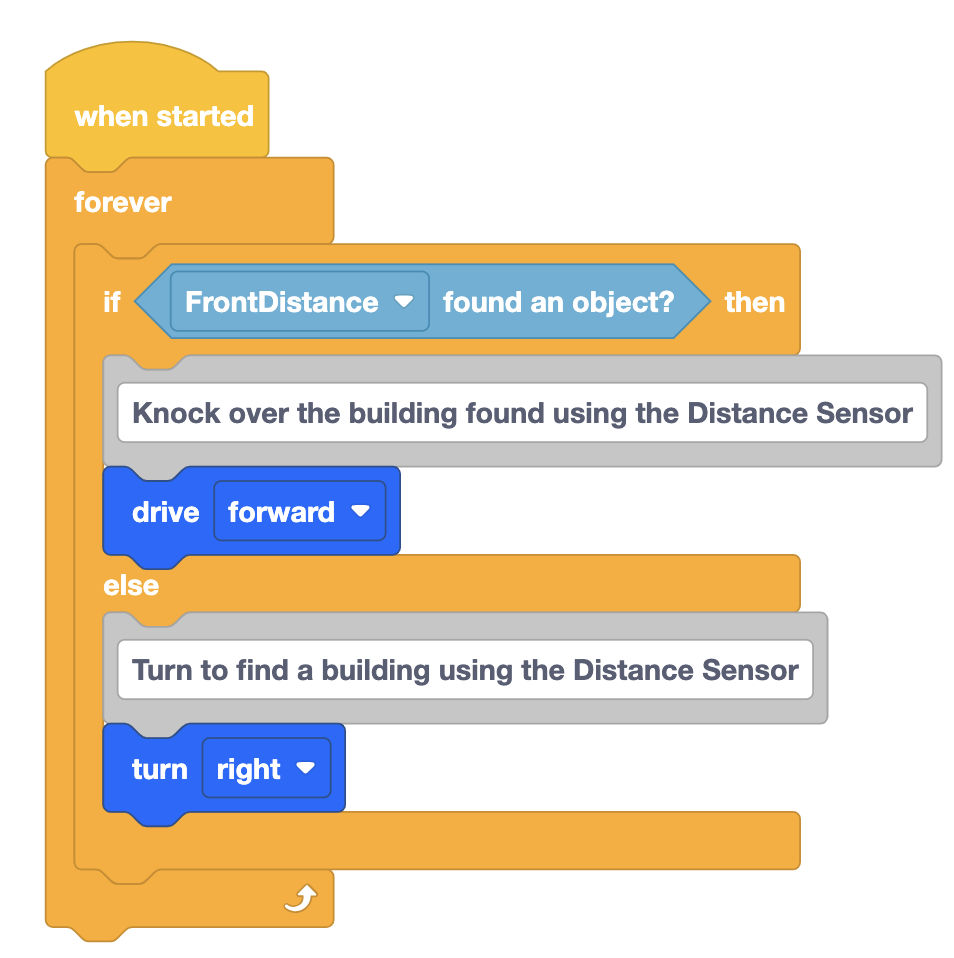
- डाउन आई सेंसर की निरंतर जांच के लिए एक ब्लॉक की आवश्यकता होती है। वीआर रोबोट को इन क्रियाओं को तब तक दोहराना होगा जब तक कि डाउन आई सेंसर लाल रंग का पता नहीं लगा लेता। सबसे पहले, [हमेशा के लिए] ब्लॉक हटाएँ।
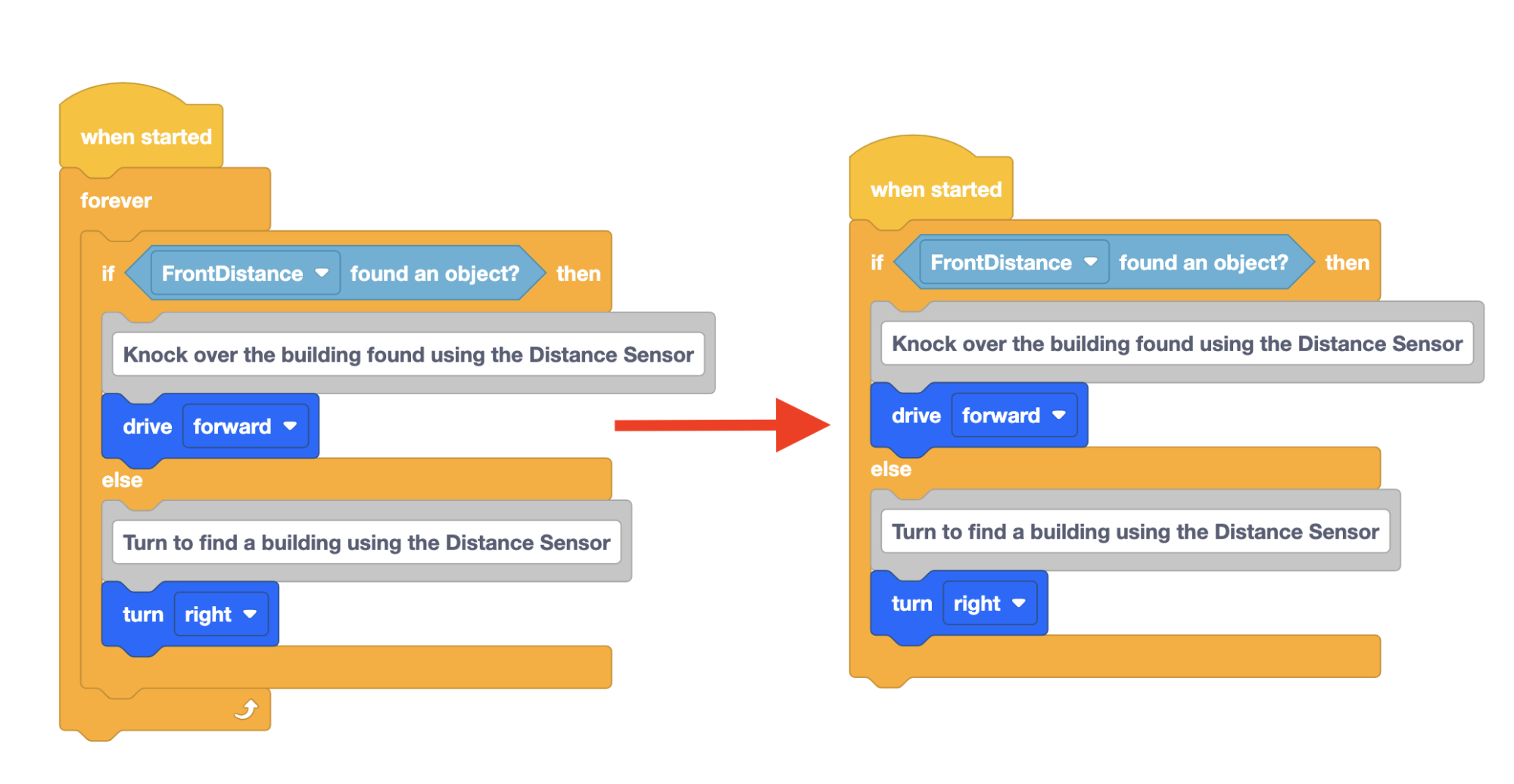
- [Repeat until] ब्लॉक जोड़ें.
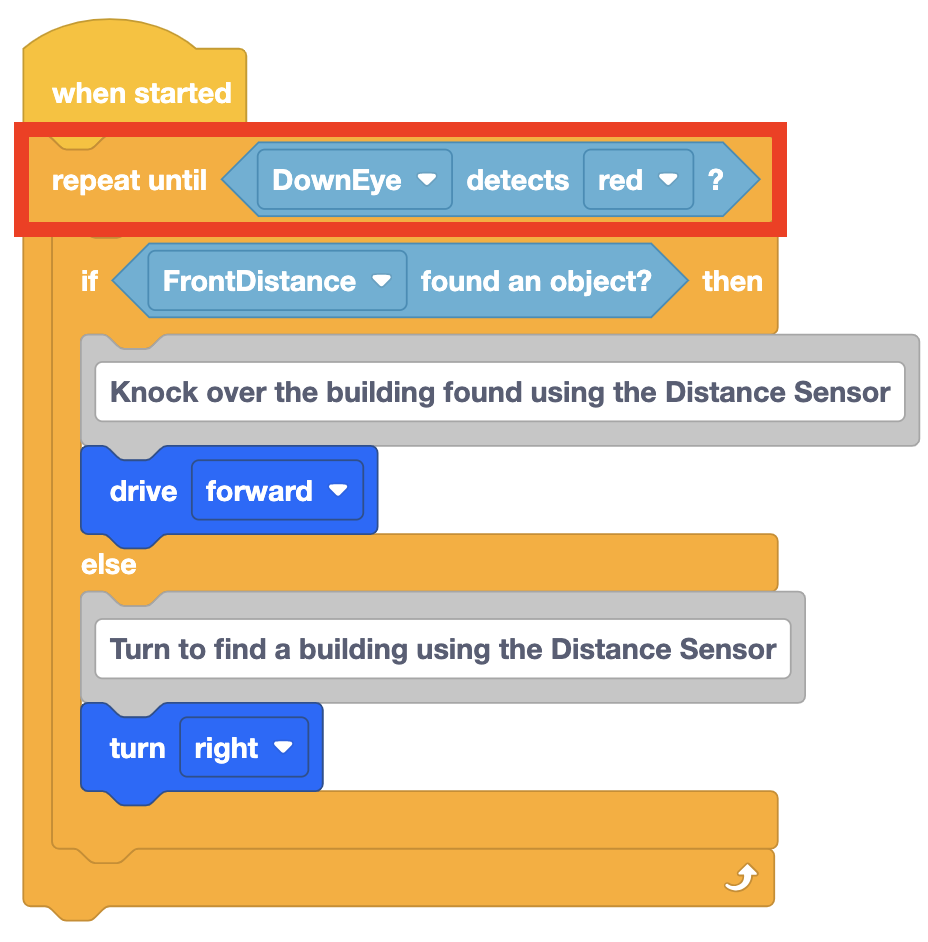
- [Repeat until] ब्लॉक के अंदर <Color sensing> ब्लॉक जोड़ें और पैरामीटर को 'DownEye' detects 'red' पर सेट करें।
इस परियोजना में [Wait until] ब्लॉक के स्थान पर [Repeat until] ब्लॉक का उपयोग किया गया है। ऐसा इसलिए है क्योंकि [Wait until] ब्लॉक एक प्रतीक्षा ब्लॉक है जो शर्त पूरी होने तक परियोजना के प्रवाह को रोक देगा। यदि [Wait until] ब्लॉक का उपयोग किया जाता है, तो [If then else] ब्लॉक तब तक निष्पादित नहीं किया जाएगा जब तक कि [Wait until] की शर्त पूरी न हो जाए और [If then else] ब्लॉक केवल एक बार निष्पादित किया जाएगा।
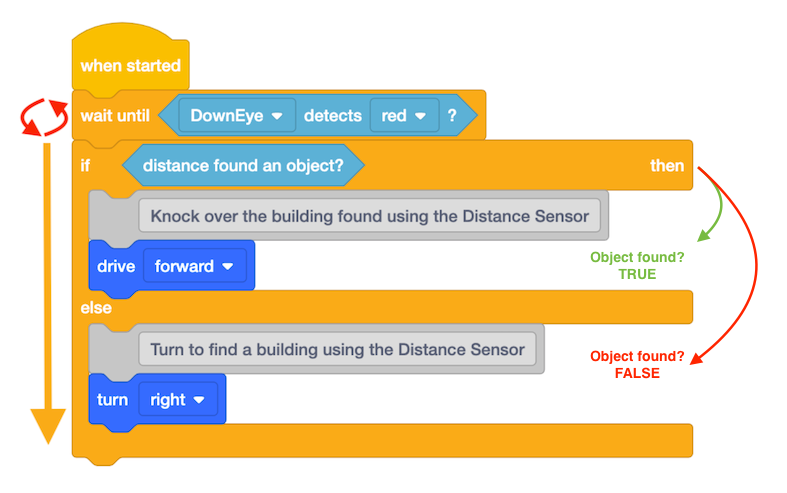
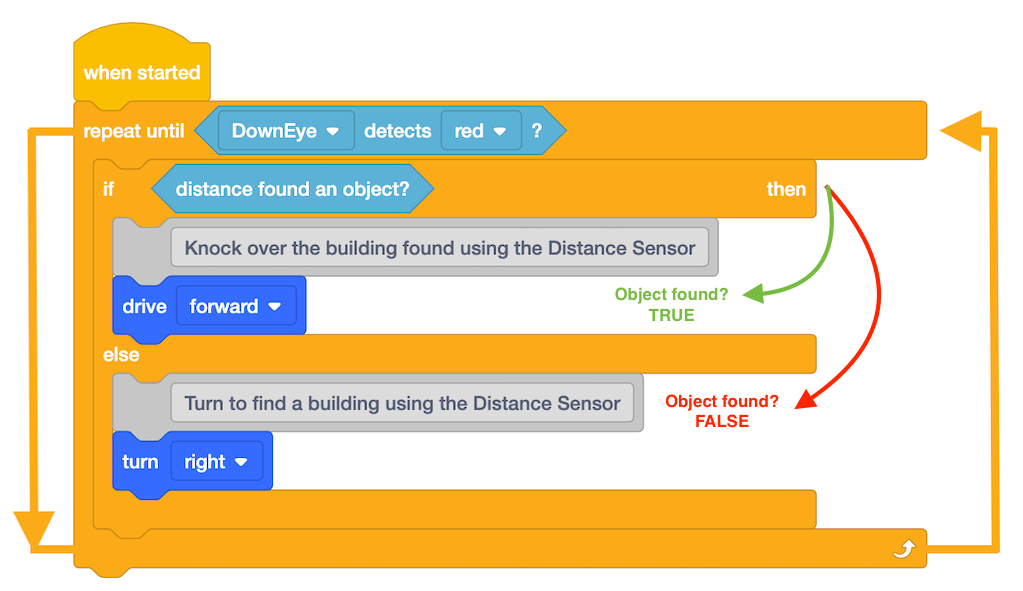
[Repeat until] ब्लॉक का उपयोग करके, [If then else] स्थिति की लगातार जाँच और निष्पादन किया जाता है।
- [Repeat until] ब्लॉक के उपयोग के उद्देश्य को नोट करने के लिए एक टिप्पणी जोड़ें।

- डायनेमिक कैसल क्रैशर प्लेग्राउंड खोलें और प्रोजेक्ट चलाएं।
-
जब यह परियोजना चलाई जाएगी, तो वीआर रोबोट किसी पाई गई वस्तु की ओर बढ़ेगा और अन्यथा दाईं ओर मुड़ जाएगा। हालांकि, हालांकि डाउन आई सेंसर लाल बॉर्डर की तलाश कर रहा है, लेकिन वीआर रोबोट को यह नहीं बताया जाता कि लाल रंग का पता चलने पर उसे क्या करना है, इसलिए वह गाड़ी चलाना जारी रखता है और अंततः खेल के मैदान से गिर जाता है।
जब [Repeat until] ब्लॉक की शर्त पूरी हो जाती है, तो प्रोजेक्ट प्रवाह [Repeat until] ब्लॉक से निष्पादित होगा।
इस पाठ के शेष भाग को जारी रखने के लिए अगला बटन का चयन करें।