
পাঠ ৩: একাধিক সেন্সর ইনপুট
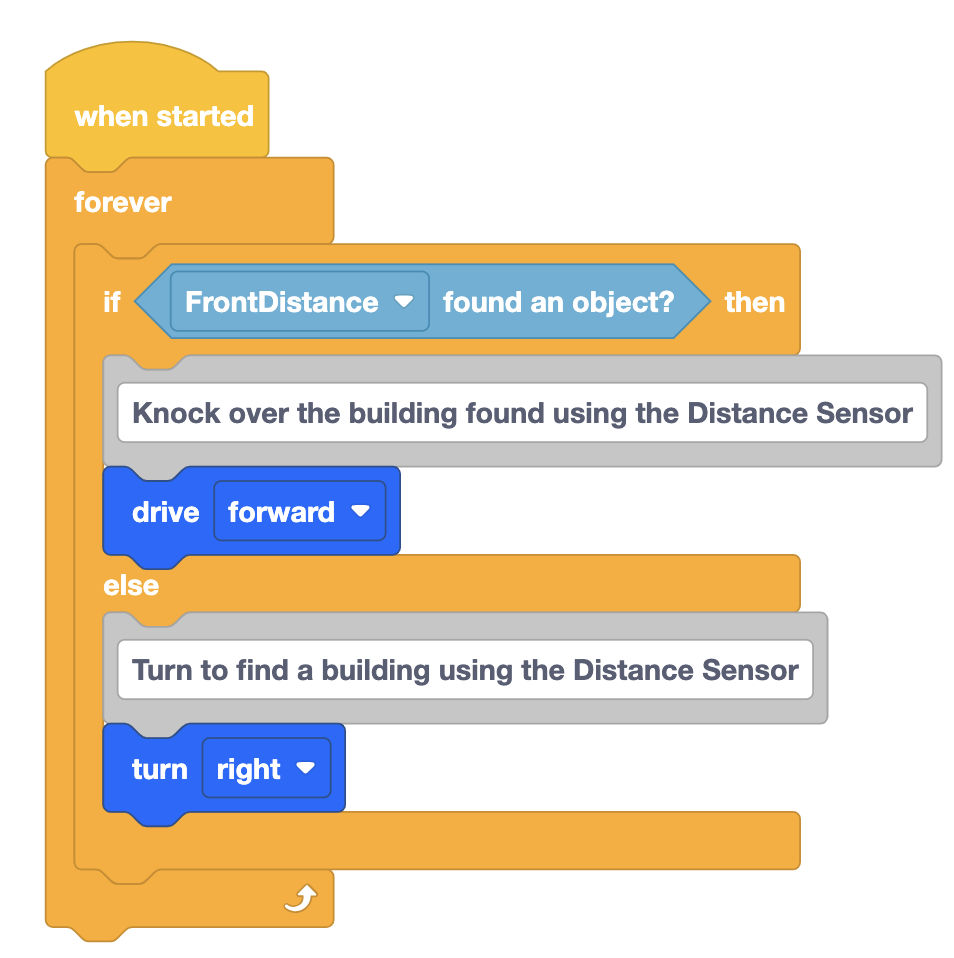
পূর্ববর্তী পাঠে, ভিআর রোবট কোনও বস্তু সনাক্ত করেছে কিনা তা নির্ধারণ করতে দূরত্ব সেন্সর ব্যবহার করা হয়েছিল, এবং যদি তাই হয়, তবে বস্তুর দিকে এগিয়ে নিয়ে যাওয়া হয়েছিল। তবে, ভিআর রোবটটি খেলার মাঠের ধারের কাছাকাছি ছিল কিনা তা থামানোর জন্য কোনও সেন্সর মান ব্যবহার করা হয়নি। খেলার মাঠের ধারের কাছাকাছি থাকাকালীন ভিআর রোবটটিকে থামিয়ে দিলে এটি পাশ থেকে সরে যেতে পারবে না।
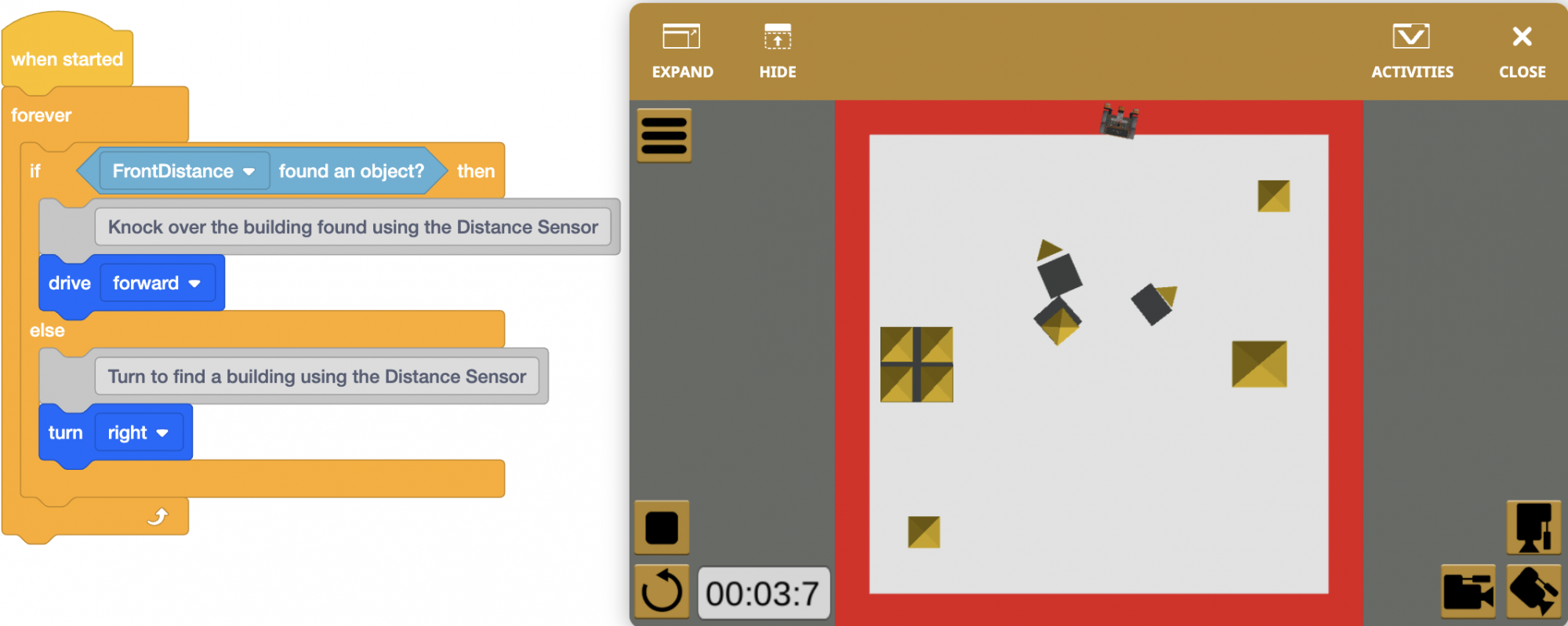
যেমন আছে, প্রকল্পটি চিরতরে এগিয়ে চলা এবং বাঁক নেওয়ার আচরণের পুনরাবৃত্তি করে। তবে খেলার মাঠের চারপাশে লাল বর্ডার চেক করার কোনো শর্ত নেই। সুতরাং, ভিআর রোবটটি সামনের দিকে ড্রাইভ করার সময় খেলার মাঠ থেকে পড়ে যেতে পারে।
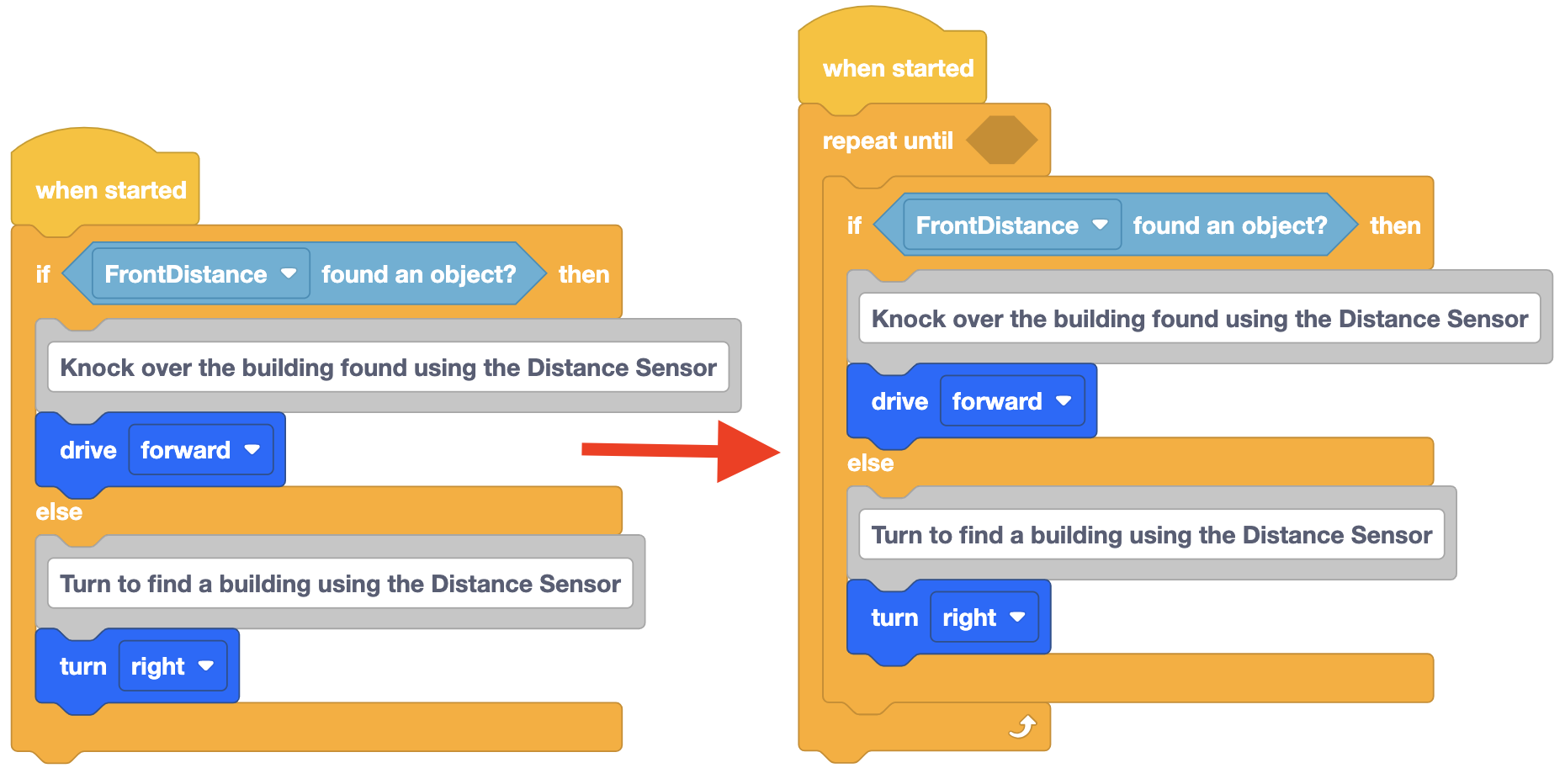
VR রোবট খেলার মাঠের প্রান্তের কাছাকাছি কিনা তা নির্ধারণ করতে সক্ষম হওয়ার জন্য আরেকটি সেন্সর প্রয়োজন। লাল সীমানা শনাক্ত না হওয়া পর্যন্ত এগিয়ে চলা এবং বাঁক নেওয়ার আচরণগুলি পুনরাবৃত্তি করতে হবে। সুতরাং, লাল সীমানা শনাক্ত করার শর্ত পূরণ না হওয়া পর্যন্ত এগিয়ে চলা এবং বাঁক নেওয়ার আচরণের পুনরাবৃত্তি করার জন্য [চিরকাল] ব্লকটিকে [রিপিট এ পর্যন্ত] ব্লক দিয়ে প্রতিস্থাপিত করা যেতে পারে। খেলার মাঠের চারপাশে লাল সীমানা সনাক্ত করে ভিআর রোবটটি খেলার মাঠের প্রান্তের কাছাকাছি কিনা তা নির্ধারণ করতে ডাউন আই সেন্সর ব্যবহার করা যেতে পারে।

- পূর্ববর্তী পাঠ থেকে Unit9Lesson2 প্রকল্পটি লোড করুন।
- প্রকল্পটির নাম পরিবর্তন করুন Unit9 Lesson3।

- ক্রমাগত ডাউন আই সেন্সর চেক করার জন্য একটি ব্লক প্রয়োজন। ডাউন আই সেন্সর লাল রঙ সনাক্ত না করা পর্যন্ত ভিআর রোবটকে এই আচরণগুলি পুনরাবৃত্তি করতে হবে। প্রথমে, [চিরদিনের] ব্লকটি সরান।
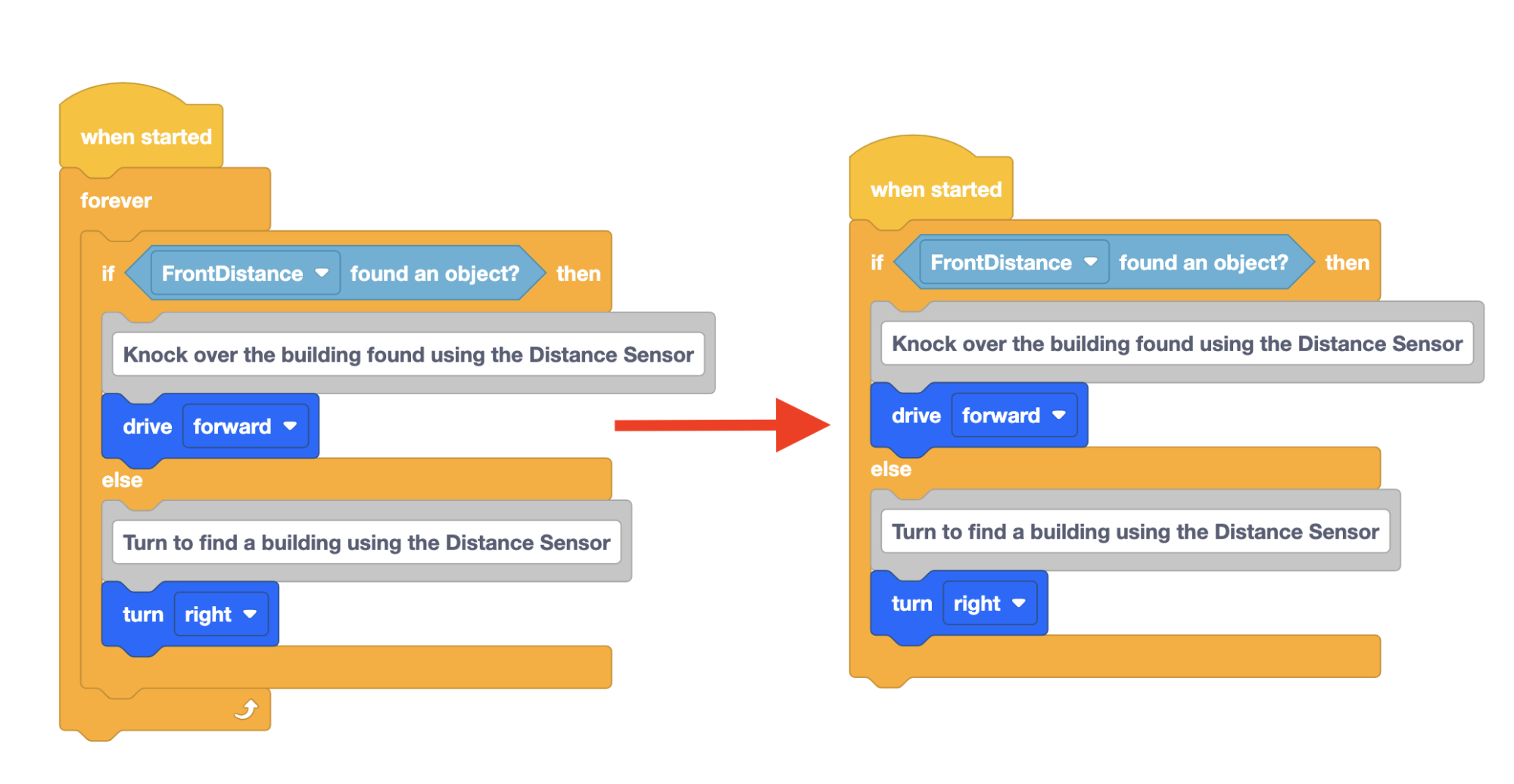
- একটি [পর্যন্ত পুনরাবৃত্তি] ব্লক যোগ করুন।
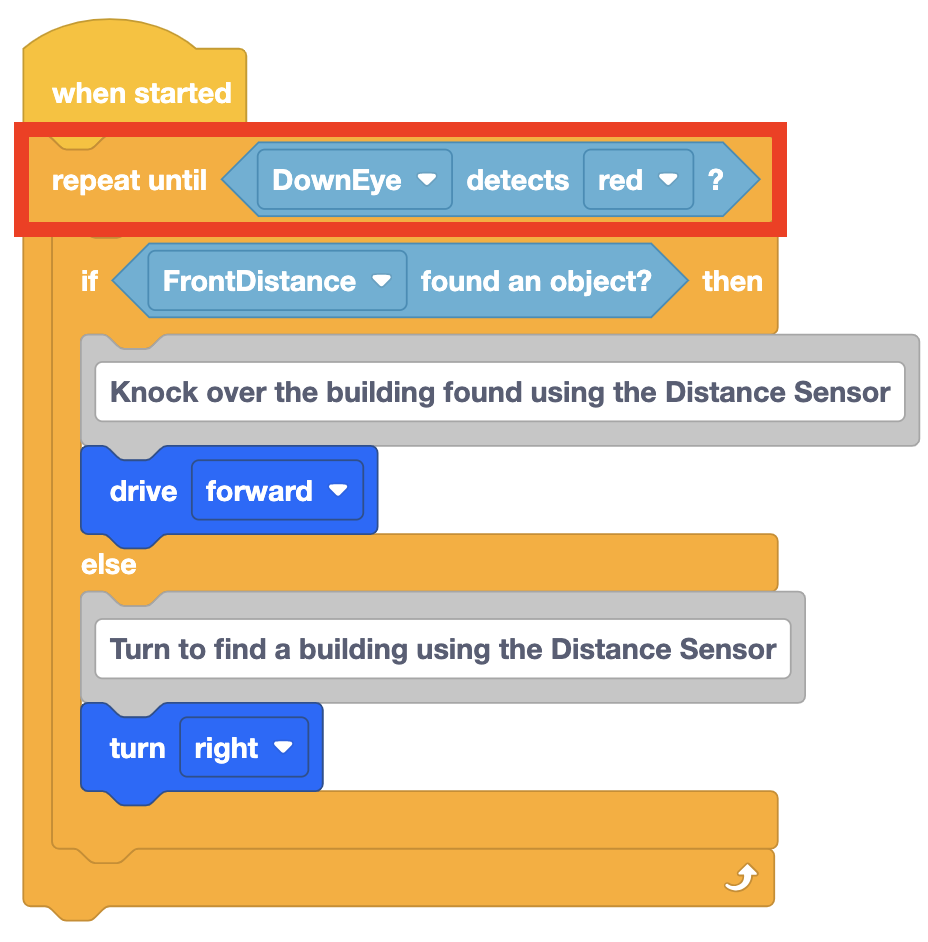
- [পর্যন্ত পুনরাবৃত্তি না হওয়া পর্যন্ত] ব্লকের ভিতরে একটি <Color sensing> ব্লক যোগ করুন এবং প্যারামিটারগুলি সেট করুন 'DownEye' সনাক্ত করে 'লাল'।
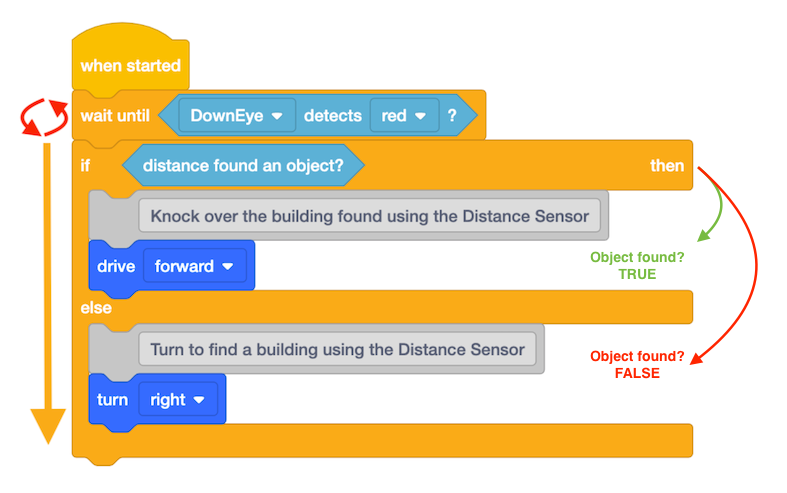
এই প্রজেক্টে একটি [অপেক্ষা করুন] ব্লকের পরিবর্তে একটি [রিপিট না পর্যন্ত] ব্লক ব্যবহার করা হয়। কারণ একটি [অপেক্ষা করুন পর্যন্ত] ব্লক হল একটি অপেক্ষমাণ ব্লক যা শর্ত পূরণ না হওয়া পর্যন্ত প্রকল্পের প্রবাহকে থামিয়ে দেবে। যদি একটি [অপেক্ষা করুন না হওয়া পর্যন্ত] ব্লক ব্যবহার করা হয়, [যদি তারপর অন্য] ব্লকটি কার্যকর করা হবে না যতক্ষণ না [অপেক্ষা করুন] শর্ত পূরণ না হয় এবং [যদি তারপর অন্য] ব্লকটি শুধুমাত্র একবার কার্যকর করা হবে।
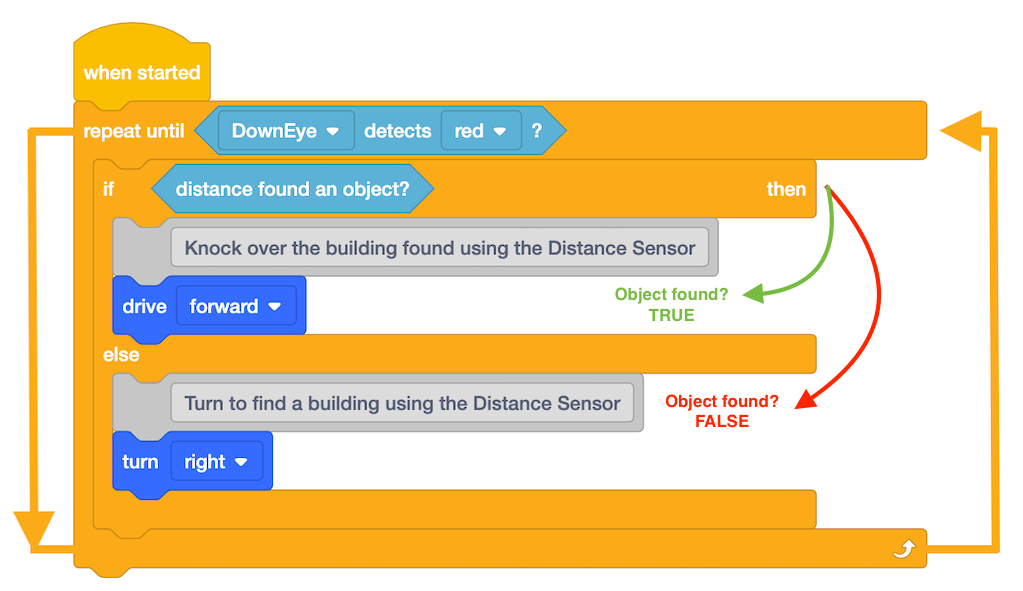
একটি [পুনরাবৃত্ত না হওয়া পর্যন্ত] ব্লক ব্যবহার করে, [যদি তারপর অন্য] শর্তটি ক্রমাগত পরীক্ষা করা হচ্ছে এবং কার্যকর করা হচ্ছে।
- [পুনরাবৃত্তি পর্যন্ত] ব্লক ব্যবহার করার উদ্দেশ্য নোট করার জন্য একটি মন্তব্য যোগ করুন।

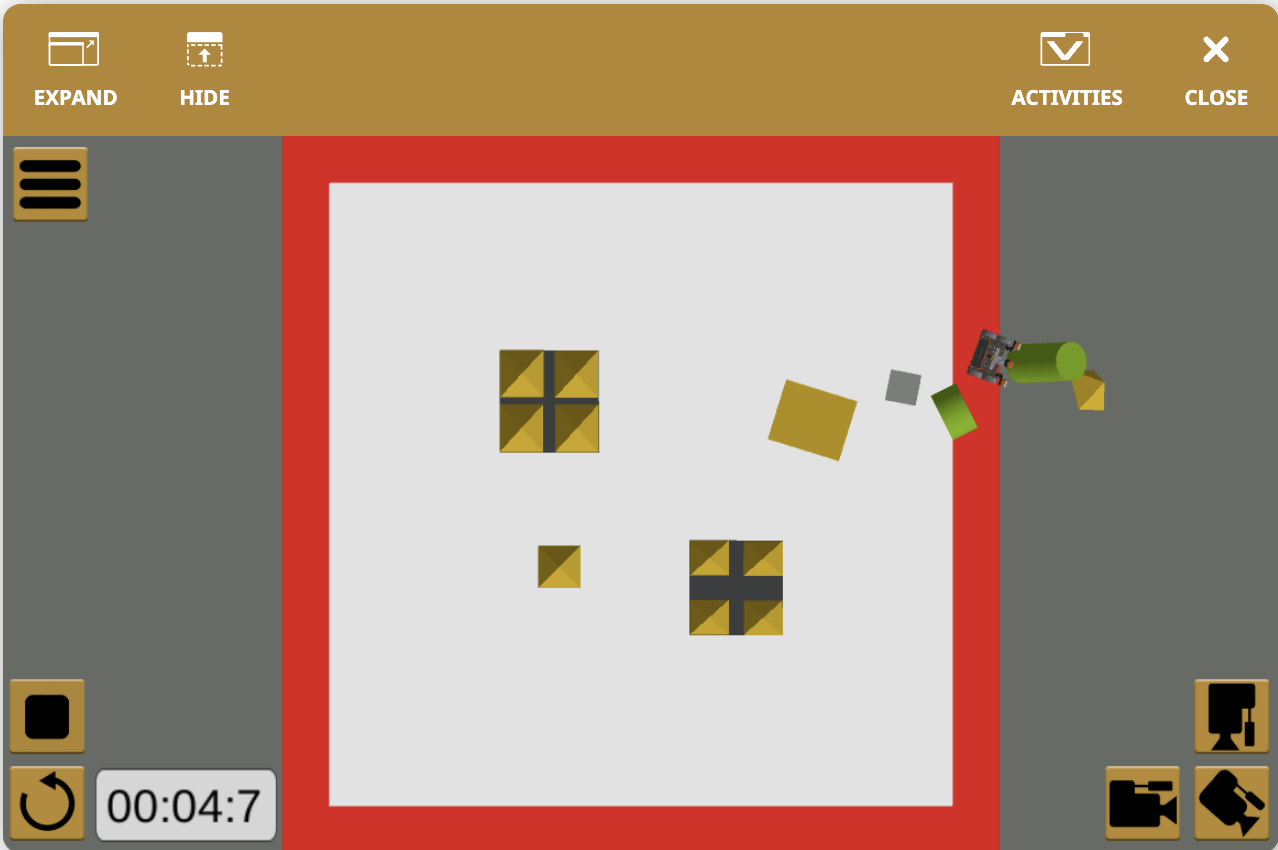
- ডায়নামিক ক্যাসেল ক্র্যাশার প্লেগ্রাউন্ড খুলুন এবং প্রকল্পটি চালান।
-
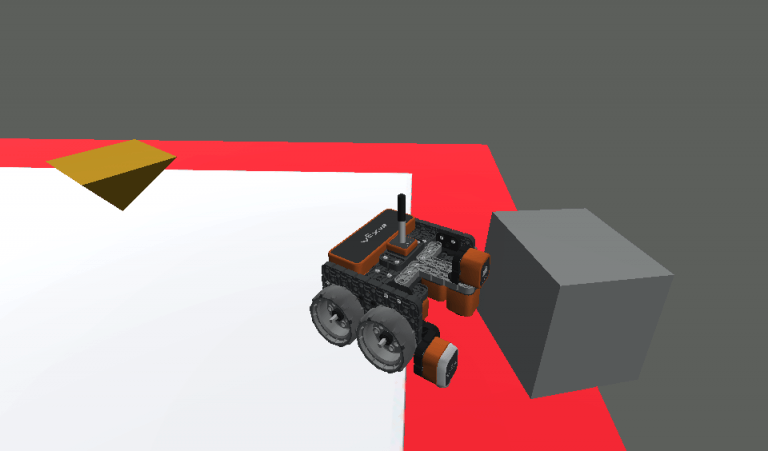
এই প্রকল্পটি চালানো হলে, VR রোবট একটি শনাক্ত বস্তুর দিকে ড্রাইভ করবে এবং অন্যথায় ডানদিকে ঘুরবে। যাইহোক, যদিও ডাউন আই সেন্সর লাল সীমানা খুঁজছে, VR রোবটকে একবার লাল শনাক্ত করার পরে কী করতে হবে তা বলা হয়নি, তাই এটি চালিয়ে যেতে থাকে এবং অবশেষে খেলার মাঠ থেকে পড়ে যায়।
একবার [পুনরাবৃত্ত না হওয়া পর্যন্ত] ব্লকের শর্ত পূরণ হলে, প্রকল্প প্রবাহটি [পুনরাবৃত্ত না হওয়া পর্যন্ত] ব্লকের বাইরে চলে যাবে।
এই পাঠের বাকি অংশটি চালিয়ে যেতে পরবর্তী বোতামটি নির্বাচন করুন।