
บทที่ 3: อินพุตเซ็นเซอร์หลายตัว
ในบทเรียนก่อนหน้านี้เซ็นเซอร์ระยะทางถูกใช้เพื่อตรวจสอบว่าหุ่นยนต์ VR ตรวจพบวัตถุหรือไม่และถ้าเป็นเช่นนั้นให้ขับไปข้างหน้าไปยังวัตถุ อย่างไรก็ตามไม่มีการใช้ค่าเซ็นเซอร์เพื่อตรวจสอบว่าหุ่นยนต์ VR อยู่ใกล้กับขอบของสนามเด็กเล่นเพื่อหยุดมันหรือไม่ การหยุดหุ่นยนต์ VR เมื่อมันอยู่ใกล้กับขอบสนามเด็กเล่นจะป้องกันไม่ให้มันขับรถออกจากด้านข้าง
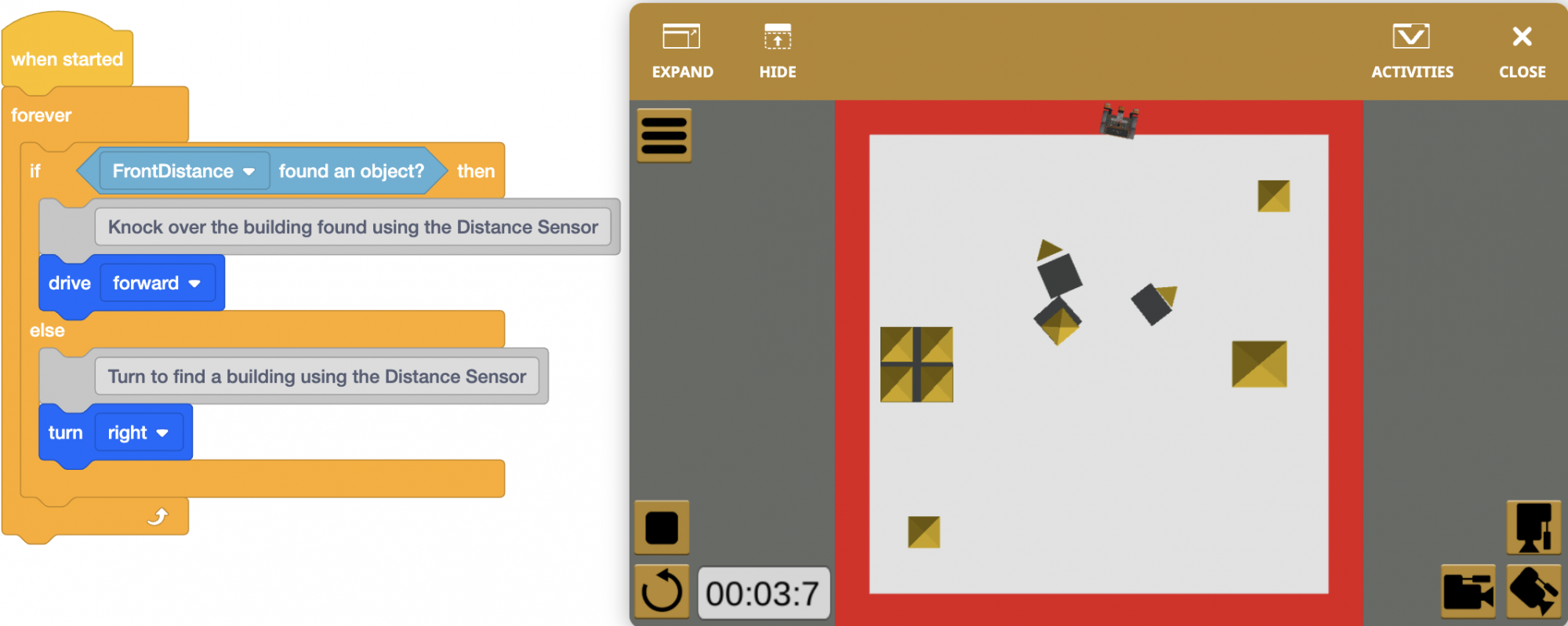
เช่นเดียวกับโครงการที่ทำซ้ำพฤติกรรมของการขับเคลื่อนไปข้างหน้าและการเลี้ยวตลอดไป อย่างไรก็ตามไม่มีเงื่อนไขที่จะตรวจสอบขอบสีแดงรอบๆสนามเด็กเล่น ดังนั้นหุ่นยนต์ VR สามารถตกจากสนามเด็กเล่นเมื่อขับไปข้างหน้า
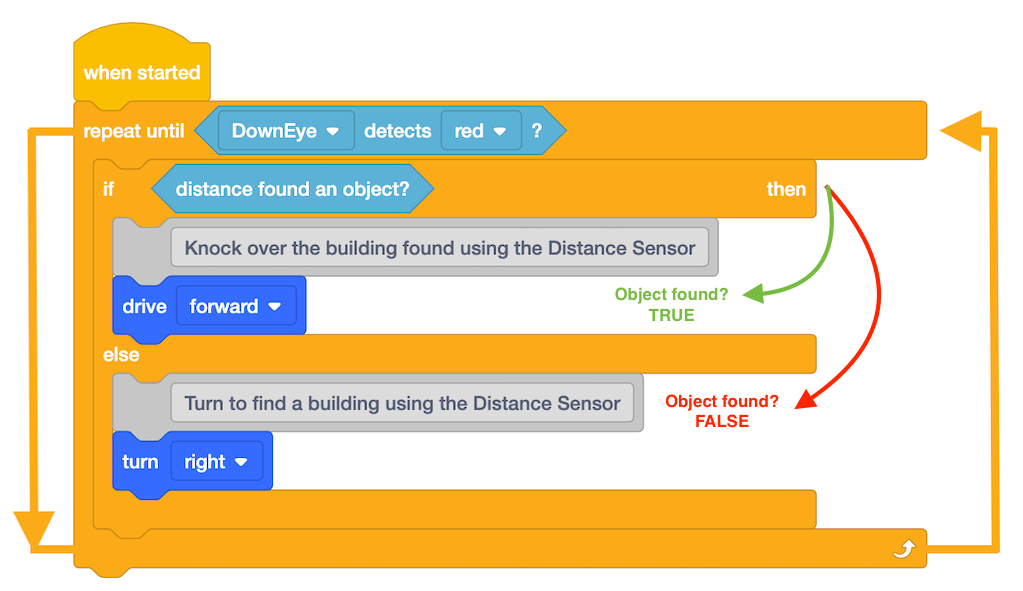
จำเป็นต้องมีเซ็นเซอร์อีกตัวเพื่อให้หุ่นยนต์ VR สามารถตรวจสอบได้ว่าอยู่ใกล้กับขอบสนามเด็กเล่นหรือไม่ พฤติกรรมของการขับไปข้างหน้าและเลี้ยวจะต้องทำซ้ำจนกว่าจะตรวจพบขอบสีแดง ดังนั้นบล็อก [Forever] สามารถถูกแทนที่ด้วยบล็อก [Repeat until] เพื่อที่จะทำซ้ำพฤติกรรมของการขับรถไปข้างหน้าและการเลี้ยวจนกว่าจะตรงตามเงื่อนไขของการตรวจจับขอบสีแดง เซ็นเซอร์ตรวจจับดวงตาลงสามารถใช้เพื่อตรวจสอบว่าหุ่นยนต์ VR อยู่ใกล้กับขอบสนามเด็กเล่นหรือไม่โดยการตรวจจับขอบสีแดงรอบสนามเด็กเล่น

- โหลด โป รเจกต์ Unit9Lesson2 จากบทเรียนก่อนหน้า

- เปลี่ยนชื่อ โครงการUnit9Lesson3

- จำเป็นต้องมีการปิดกั้นเพื่อตรวจสอบเซ็นเซอร์ดวงตาลงอย่างต่อเนื่อง หุ่นยนต์ VR จะต้องทำพฤติกรรมเหล่านี้ซ้ำจนกว่า Down Eye Sensor จะตรวจพบสีแดง ก่อนอื่นให้ลบบล็อค [Forever] ออก

- เพิ่มบล็อค [ทำซ้ำจนกว่า]

- เพิ่ม <Color sensing> บล็อกภายในบล็อก [ทำซ้ำจนกว่า] และตั้งค่าพารามิเตอร์เป็น ‘DownEye' ตรวจพบ ‘สีแดง’

ใช้บล็อค [ทำซ้ำจนกว่า] แทนบล็อค [รอจนกว่า] ในโปรเจกต์นี้ เนื่องจากบล็อก [รอจนกว่าจะถึง] เป็นบล็อกรอที่จะหยุดการไหลของโครงการชั่วคราวจนกว่าจะเป็นไปตามเงื่อนไข หากมีการใช้บล็อก [รอจนกว่า] บล็อก [ถ้าเป็นเช่นนั้น] จะไม่ถูกดำเนินการจนกว่าจะตรงตามเงื่อนไขของ [รอจนกว่า] และบล็อก [ถ้าเป็นเช่นนั้น] จะถูกดำเนินการเพียงครั้งเดียว
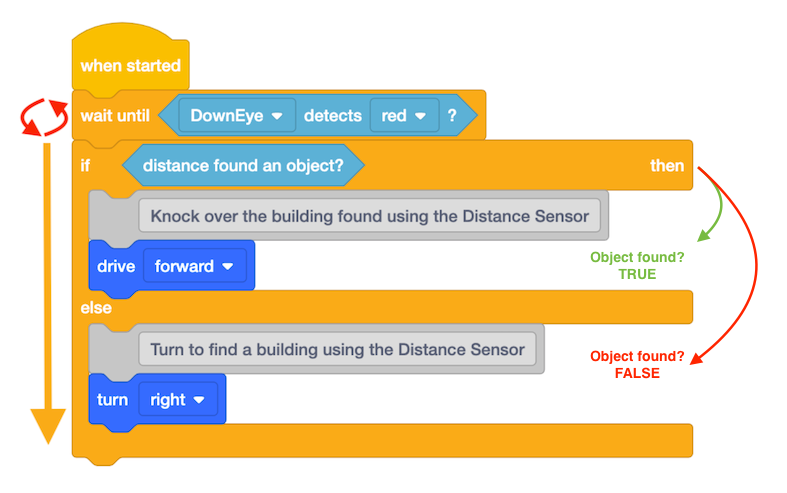
โดยการใช้บล็อก [ทำซ้ำจนกว่า] เงื่อนไข [ถ้าเป็นเช่นนั้น] จะถูกตรวจสอบและดำเนินการอย่างต่อเนื่อง
- เพิ่มความคิดเห็นเพื่อทราบวัตถุประสงค์ของการใช้บล็อก [ทำซ้ำจนกว่า]

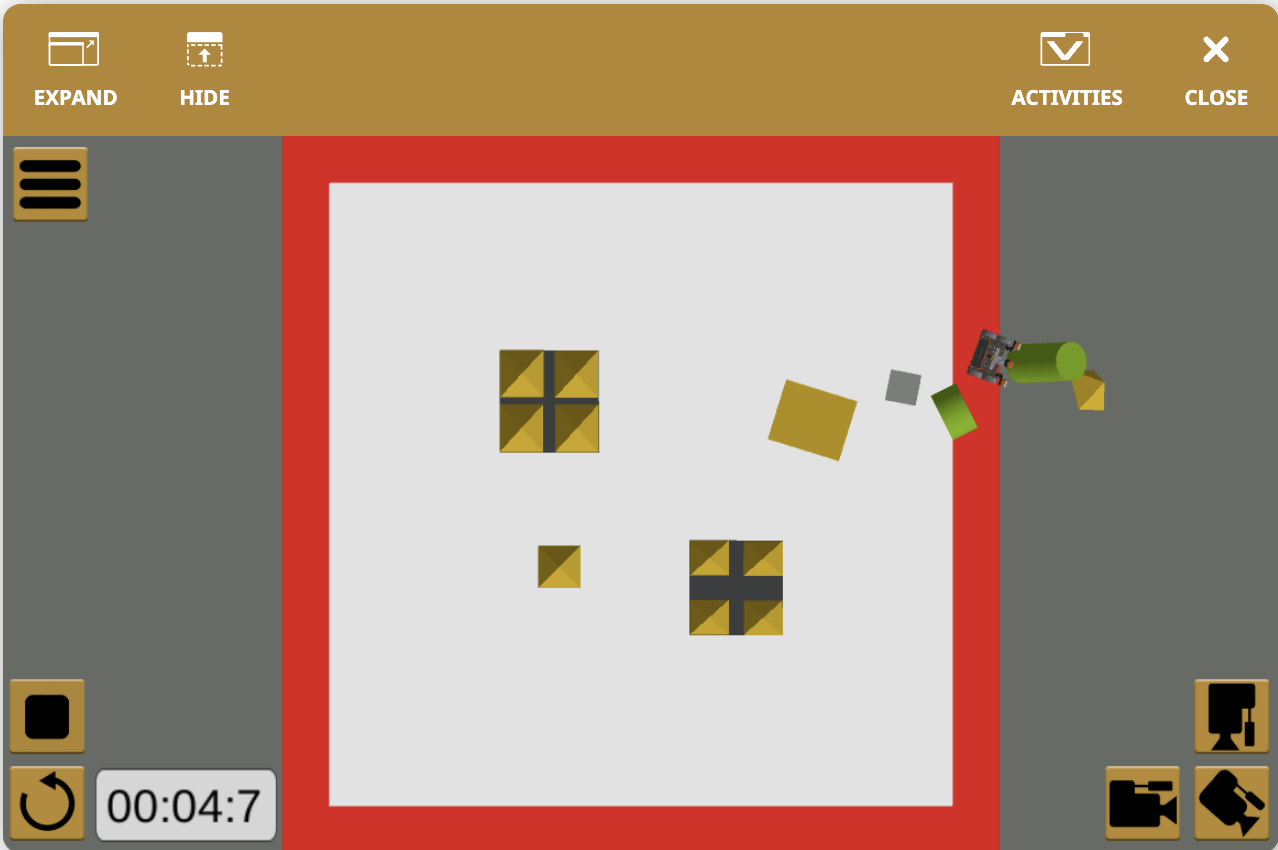
- เปิด Dynamic Castle Crasher Playground และดำเนินโครงการ
-
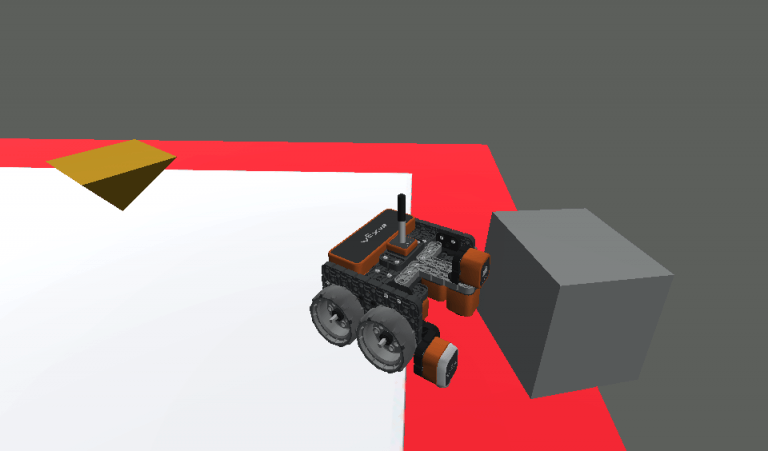
เมื่อโครงการนี้ทำงานหุ่นยนต์ VR จะขับเคลื่อนไปยังวัตถุที่ตรวจพบและเลี้ยวขวาเป็นอย่างอื่น อย่างไรก็ตามแม้ว่า Down Eye Sensor กำลังมองหาขอบสีแดงแต่หุ่นยนต์ VR จะไม่ได้รับแจ้งว่าจะทำอย่างไรเมื่อตรวจพบสีแดงดังนั้นจึงยังคงขับรถต่อไปและในที่สุดก็ตกลงมาจากสนามเด็กเล่น
เมื่อตรงตามเงื่อนไขของบล็อก [ทำซ้ำจนกว่า] แล้วโปรเจกต์โฟลว์จะดำเนินการออกจากบล็อก [ทำซ้ำจนกว่า]
เลือกปุ่ม ถัดไป เพื่อดำเนินการกับบทเรียนส่วนที่เหลือนี้ต่อไป