
Leçon 3 : Entrée de capteurs multiples
Dans la leçon précédente, le capteur de distance a été utilisé pour déterminer si le robot VR a détecté un objet ou non, et si oui, s'est dirigé vers l'objet. Cependant, aucune valeur de capteur n'a été utilisée pour déterminer si le robot VR était proche du bord du terrain de jeu pour l'arrêter. Arrêter le robot VR lorsqu'il était près du bord de l'aire de jeux l'empêcherait de s'éloigner du côté.
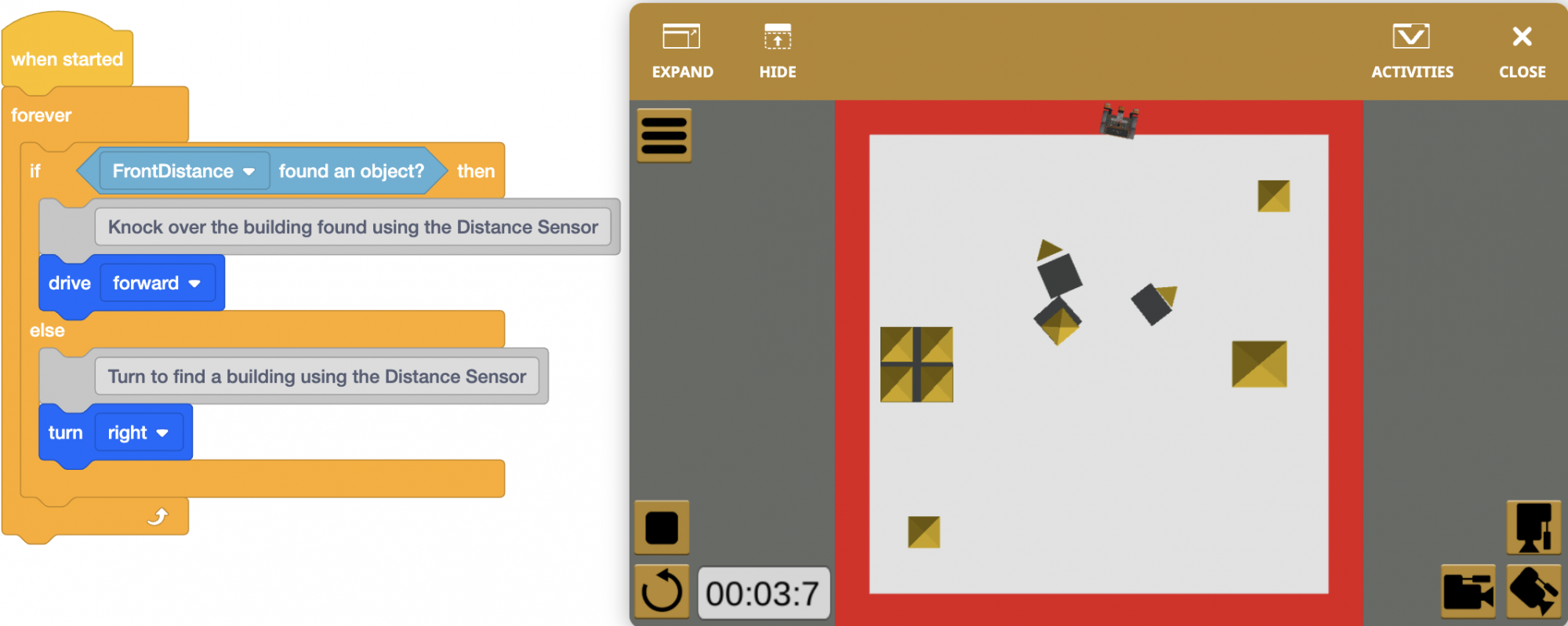
Tel quel, le projet répète les comportements d'aller de l'avant et de tourner, pour toujours. Cependant, il n'y a aucune condition pour vérifier la bordure rouge autour du terrain de jeu. Ainsi, le robot VR peut tomber du terrain de jeu en allant de l'avant.
Un autre capteur est nécessaire pour que le robot VR puisse déterminer s'il est proche du bord du terrain de jeu ou non. Les comportements consistant à avancer et à tourner n'ont qu'à se répéter jusqu'à ce que la bordure rouge soit détectée. Ainsi, le bloc [Forever] peut être remplacé par le bloc [Repeat until], afin de répéter les comportements de conduite en avant et de rotation jusqu'à ce que la condition de détection de la bordure rouge soit remplie. Le capteur Down Eye peut être utilisé pour déterminer si le robot VR est proche du bord du terrain de jeu en détectant la bordure rouge autour du terrain de jeu.

- Chargez le projet Unit9Lesson2 de la leçon précédente.

- Renommer le projet Unit9Lesson3.

- Un bloc est nécessaire pour vérifier en permanence le capteur Down Eye. Le robot VR devra répéter ces comportements jusqu'à ce que le capteur Down Eye détecte la couleur rouge. Tout d'abord, retirez le bloc [Forever].

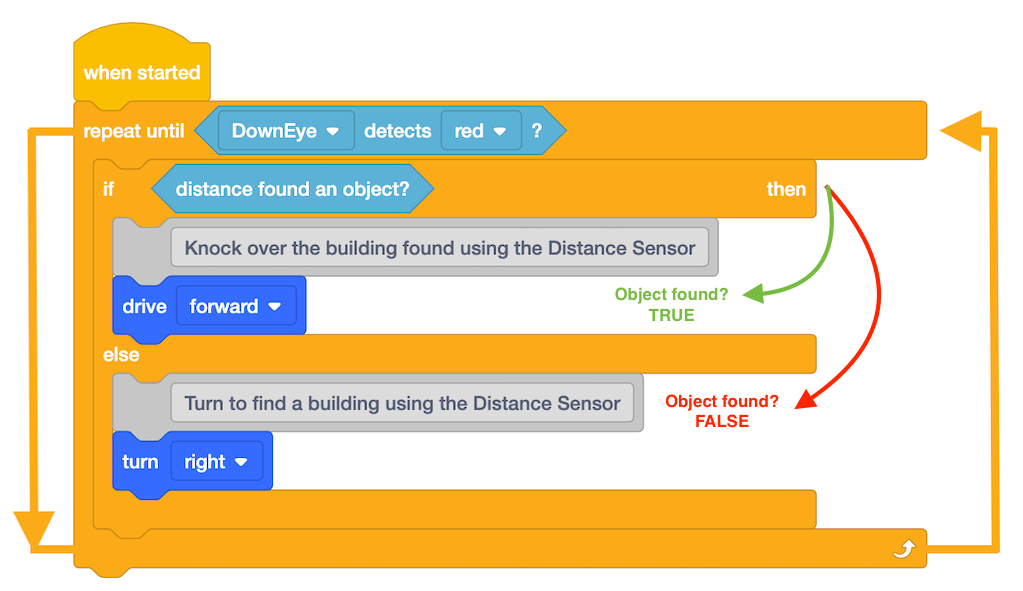
- Ajoutez un bloc [Répéter jusqu'à].

- Ajoutez un <Color sensing> bloc à l'intérieur du bloc [Répéter jusqu'à] et définissez les paramètres sur « DownEye » détecte « rouge ».

Un bloc [Répéter jusqu'au] est utilisé au lieu d'un bloc [Attendre jusqu'au] dans ce projet. En effet, un bloc [Attendre jusqu'à] est un bloc d'attente qui mettra en pause le flux du projet jusqu'à ce que la condition soit remplie. Si un bloc [Wait until] est utilisé, le bloc [If then else] ne sera pas exécuté tant que la condition du [Wait until] n'est pas remplie et le bloc [If then else] ne sera exécuté qu'une seule fois.
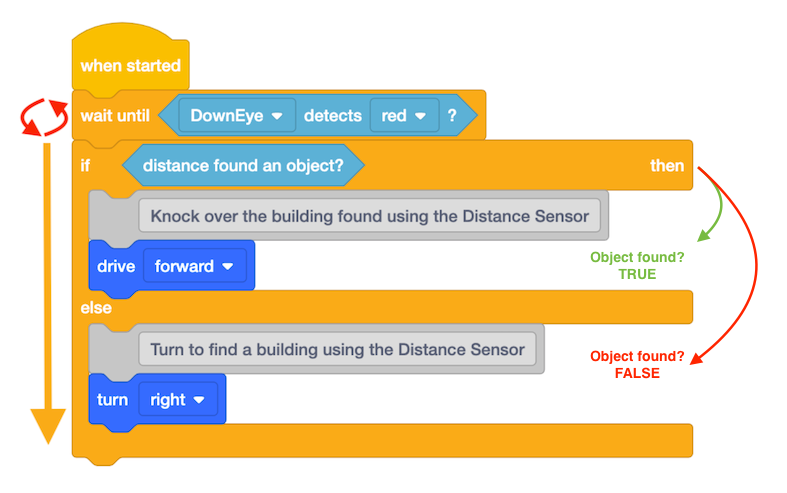
En utilisant un bloc [Repeat until], la condition [If then else] est constamment vérifiée et exécutée.
- Ajoutez un commentaire pour noter le but de l'utilisation du bloc [Répéter jusqu'à].

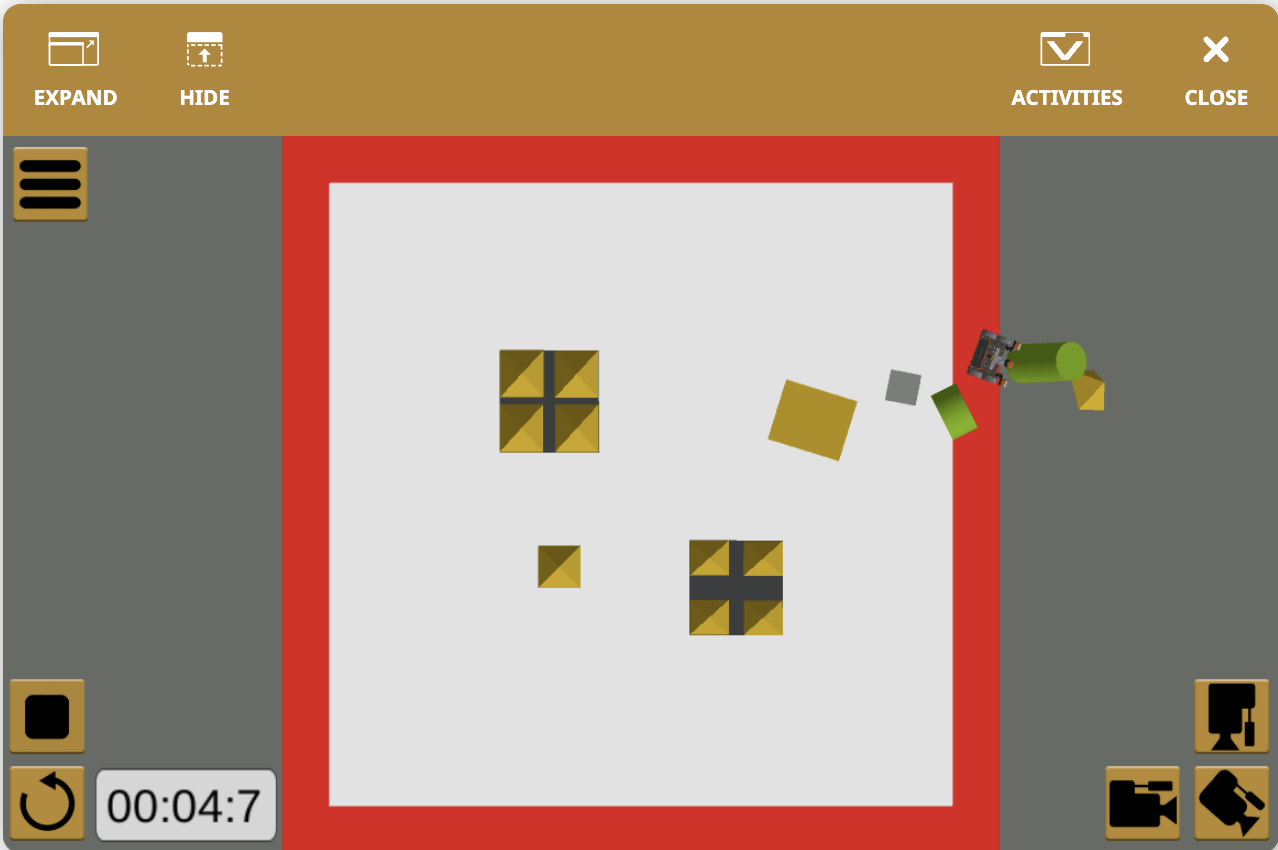
- Ouvrez le terrain de jeu Dynamic Castle Crasher et exécutez le projet.
-
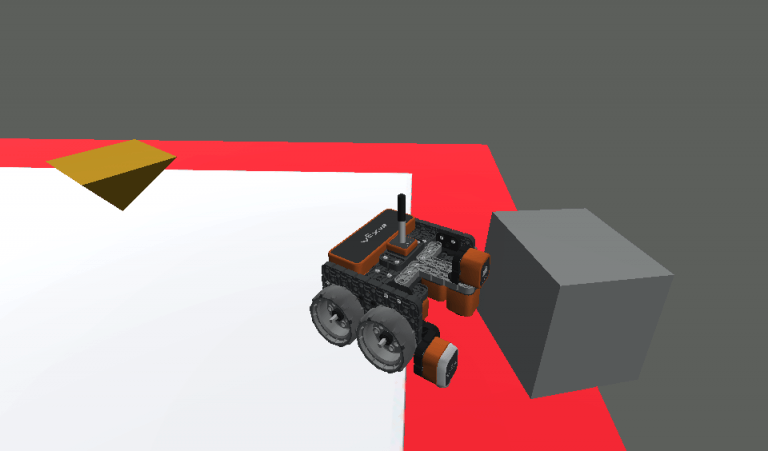
Lorsque ce projet est exécuté, le robot VR se dirigera vers un objet détecté et tournera à droite sinon. Cependant, même si le capteur Down Eye recherche la bordure rouge, le robot VR ne sait pas quoi faire une fois qu'il détecte le rouge, il continue donc à conduire et finit par tomber du terrain de jeu.
Une fois que la condition du bloc [Répéter jusqu'à] est remplie, le flux de projet s'exécutera hors du bloc [Répéter jusqu'à].
Sélectionnez le bouton Suivant pour continuer le reste de cette leçon.