
Bài 3: Đầu vào nhiều cảm biến
Trong Bài học trước, Cảm biến khoảng cách đã được sử dụng để xác định xem Robot VR có phát hiện ra vật thể hay không và nếu có, sẽ di chuyển về phía vật thể đó. Tuy nhiên, không có giá trị cảm biến nào được sử dụng để xác định xem Robot VR có ở gần mép Sân chơi để dừng nó hay không. Dừng VR Robot khi nó ở gần mép Sân chơi sẽ ngăn nó lao ra khỏi mép.
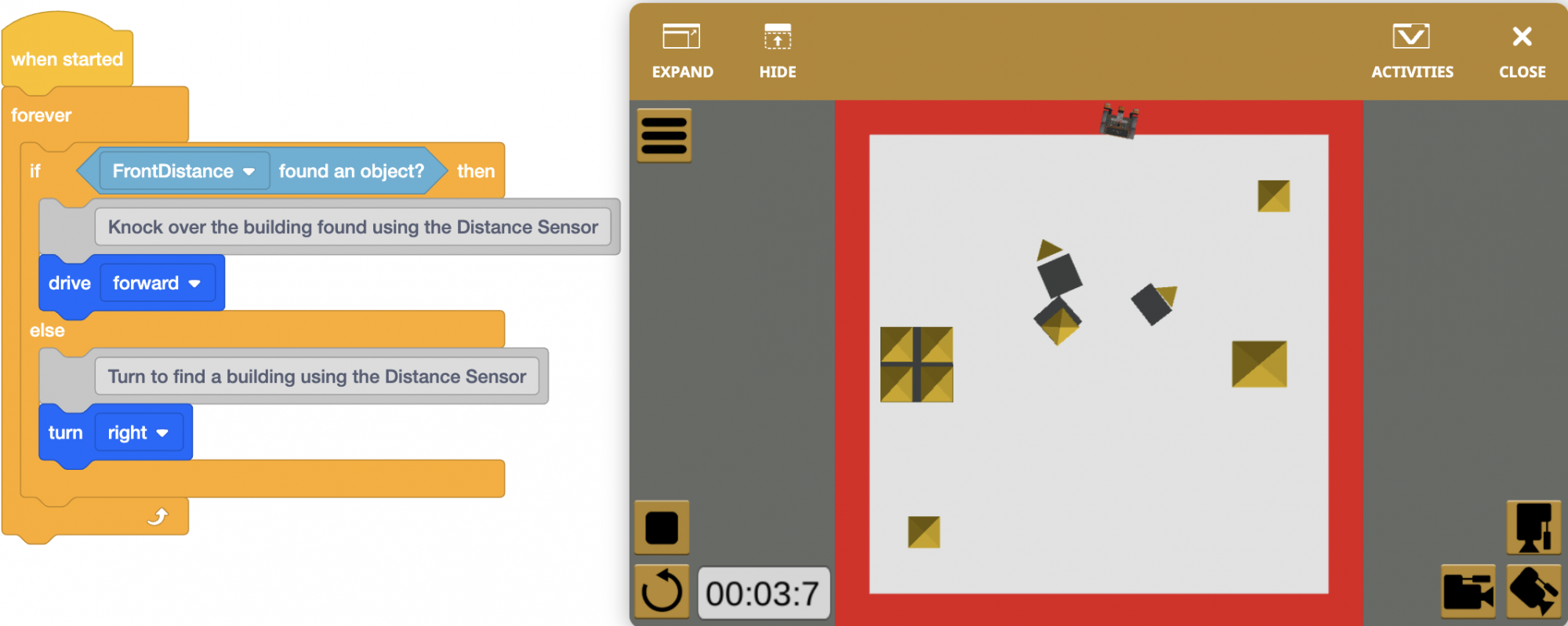
Theo đó, dự án lặp lại hành vi lái xe về phía trước và rẽ mãi mãi. Tuy nhiên, không có điều kiện nào để kiểm tra đường viền màu đỏ xung quanh Sân chơi. Vì vậy, Robot VR có thể rơi khỏi Sân chơi khi di chuyển về phía trước.
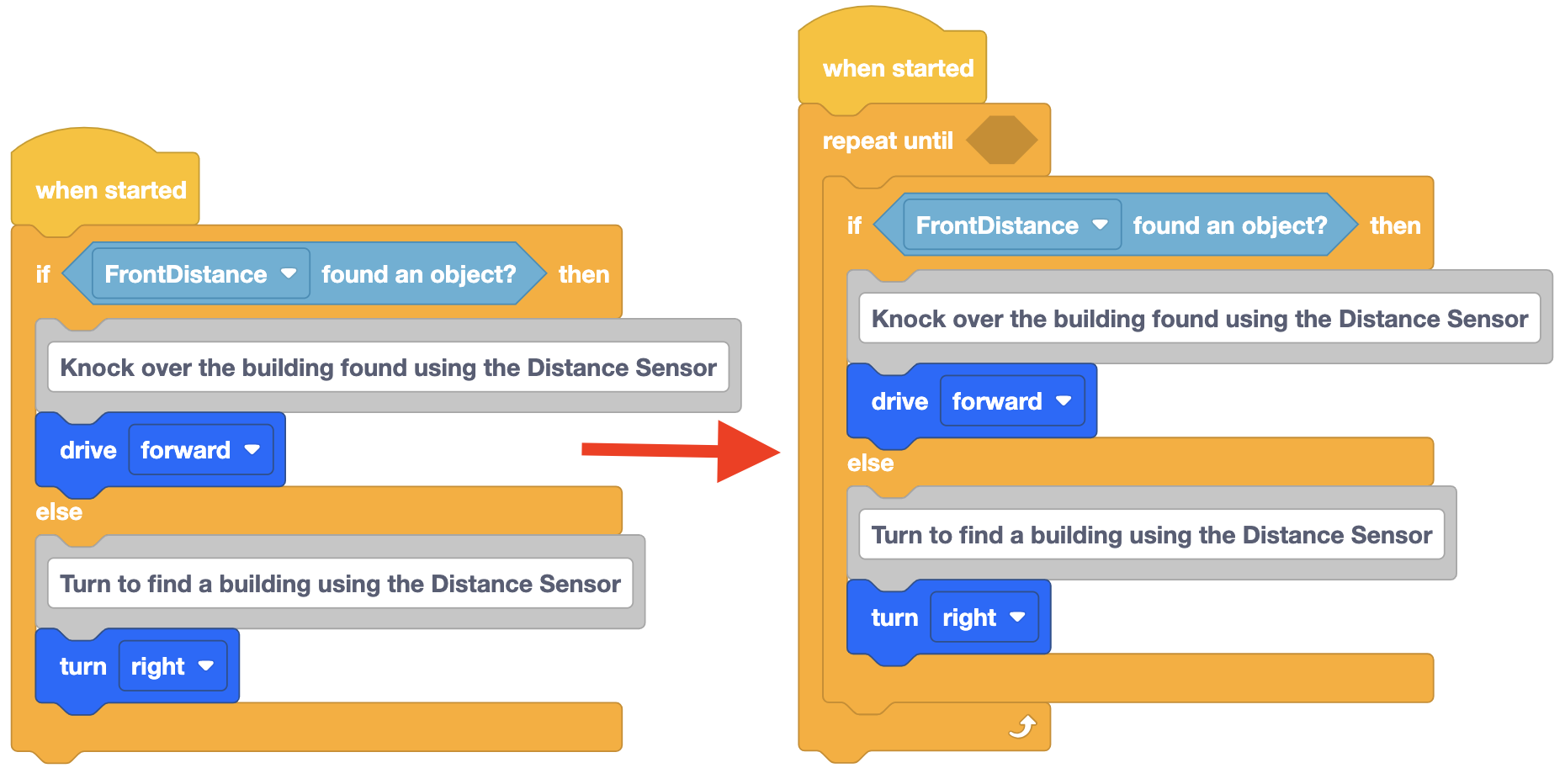
Robot VR cần có một cảm biến khác để có thể xác định xem nó có ở gần mép Sân chơi hay không. Các hành vi lái xe về phía trước và rẽ chỉ cần lặp lại cho đến khi phát hiện thấy đường viền màu đỏ. Do đó, khối [Mãi mãi] có thể được thay thế bằng khối [Lặp lại cho đến khi], để lặp lại hành vi lái xe về phía trước và rẽ cho đến khi đáp ứng được điều kiện phát hiện đường viền màu đỏ. Cảm biến mắt xuống có thể được sử dụng để xác định xem Robot VR có ở gần mép Sân chơi hay không bằng cách phát hiện đường viền màu đỏ xung quanh Sân chơi.

- Tải dự án Unit9Lesson2 từ Bài học trước.
- Đổi tên dự án thành Unit9Lesson3.

- Cần có một khối để liên tục kiểm tra Cảm biến mắt xuống. Robot VR sẽ cần lặp lại các hành vi này cho đến khi Cảm biến mắt dưới phát hiện màu đỏ. Đầu tiên, xóa khối [Mãi mãi].
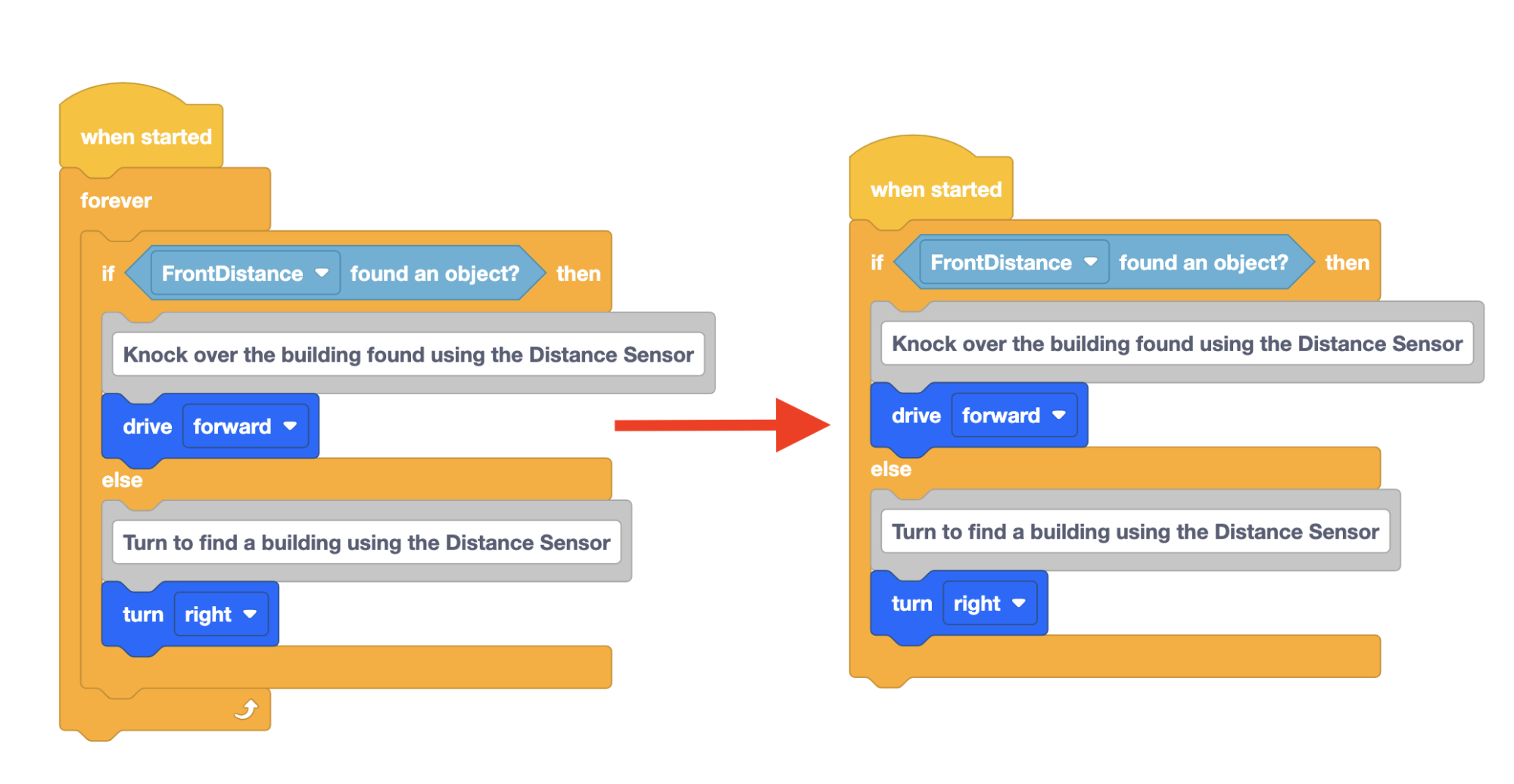
- Thêm khối [Lặp lại cho đến].
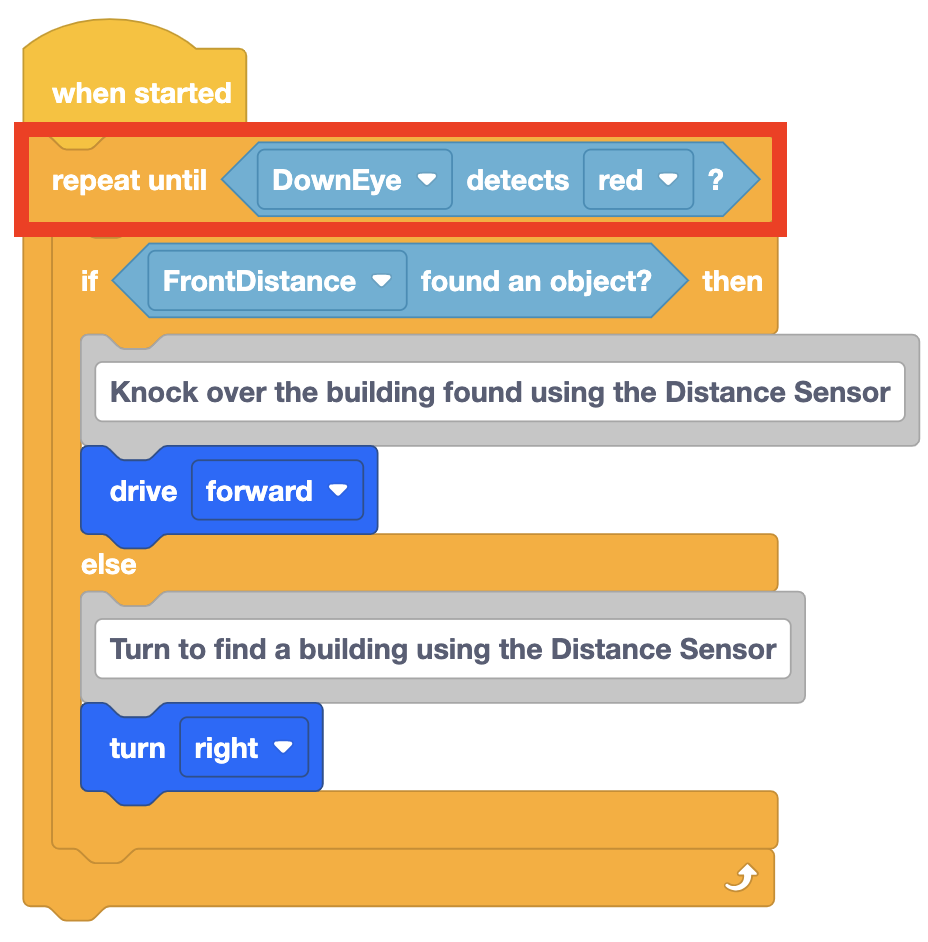
- Thêm khối <Color sensing> vào bên trong khối [Lặp lại cho đến khi] và đặt tham số thành 'DownEye' phát hiện 'màu đỏ'.
Khối [Lặp lại cho đến] được sử dụng thay cho khối [Chờ cho đến] trong dự án này. Điều này là do khối [Chờ cho đến khi] là khối chờ sẽ tạm dừng luồng của dự án cho đến khi điều kiện được đáp ứng. Nếu sử dụng khối [Chờ cho đến khi], khối [Nếu thì khác] sẽ không được thực thi cho đến khi điều kiện của khối [Chờ cho đến khi] được đáp ứng và khối [Nếu thì khác] sẽ chỉ được thực thi một lần.
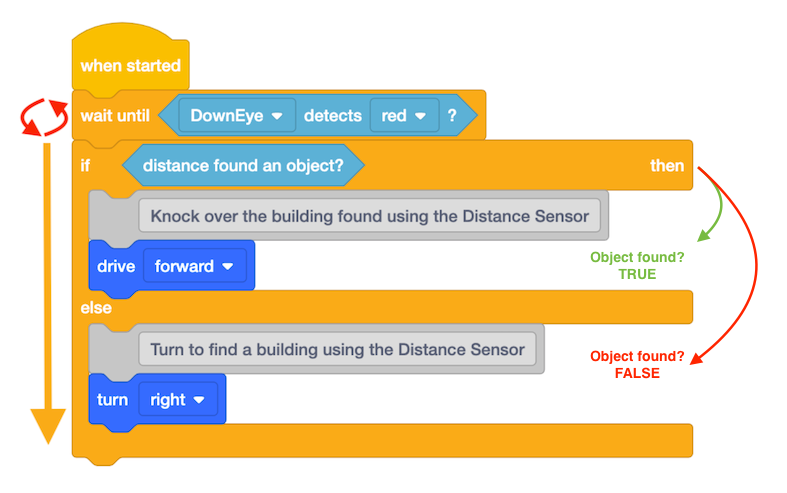
Bằng cách sử dụng khối [Lặp lại cho đến khi], điều kiện [Nếu thì khác] liên tục được kiểm tra và thực thi.
- Thêm bình luận để ghi chú mục đích sử dụng khối [Lặp lại cho đến].

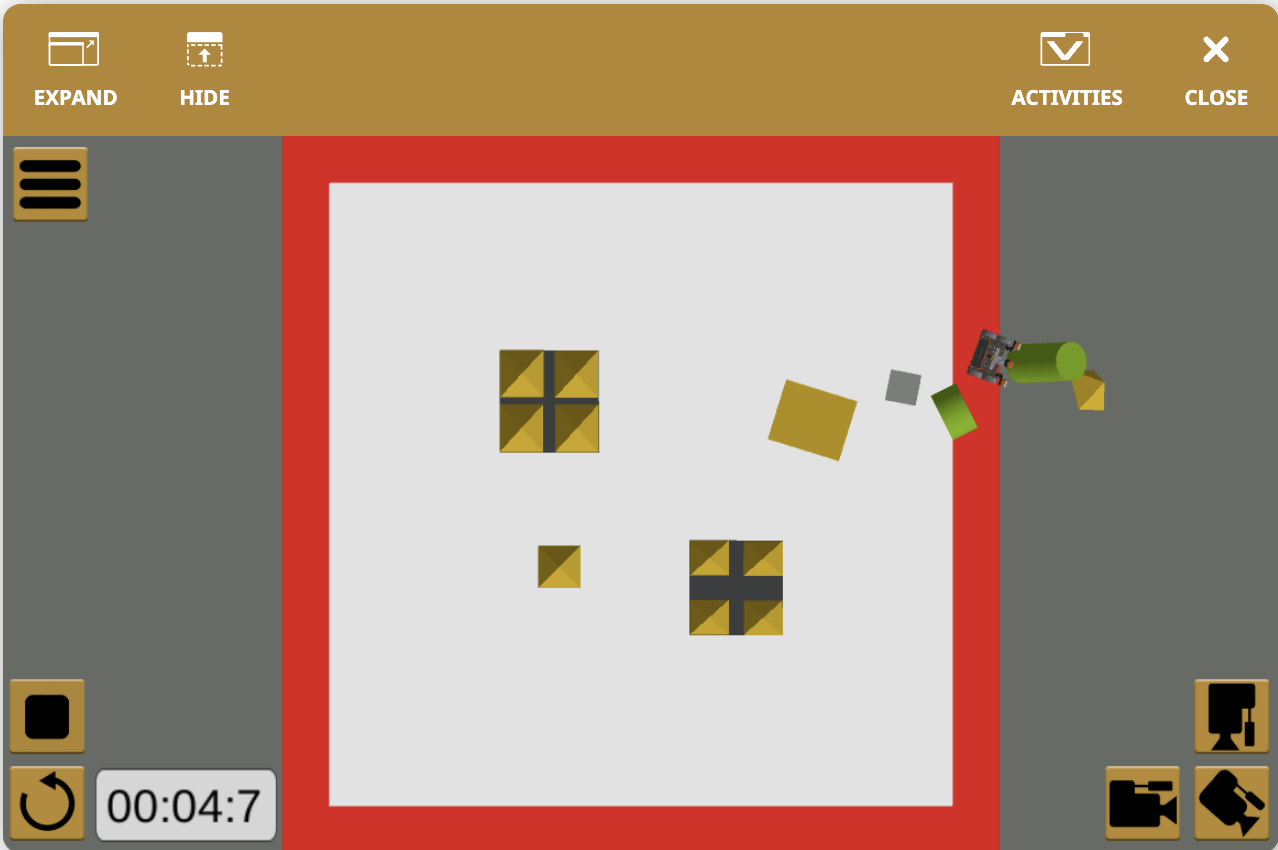
- Mở Dynamic Castle Crasher Playground và chạy dự án.
-
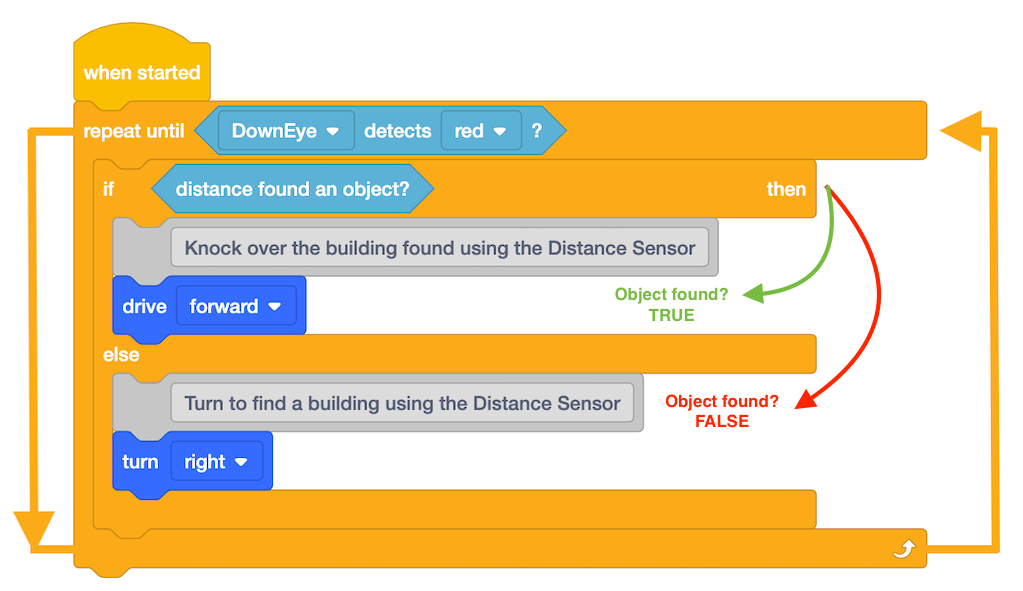
Khi dự án này được chạy, VR Robot sẽ di chuyển về phía vật thể được phát hiện và rẽ phải nếu không. Tuy nhiên, mặc dù Cảm biến mắt hướng xuống đang tìm kiếm đường viền màu đỏ, Robot VR không được thông báo phải làm gì khi phát hiện ra đường viền màu đỏ, vì vậy nó vẫn tiếp tục lái và cuối cùng rơi khỏi Sân chơi.
Khi điều kiện của khối [Lặp lại cho đến] được đáp ứng, luồng dự án sẽ thực thi ra khỏi khối [Lặp lại cho đến].
Chọn nút Tiếp theo để tiếp tục phần còn lại của Bài học này.