
الدرس 1: ما هو مستشعر المصد ؟
في هذا الدرس، ستتعلم ما هو المستشعر ولماذا تستخدم المستشعرات مع روبوت الواقع الافتراضي. المستشعر الأول الذي ستتعرف عليه هو مستشعر المصد. سوف تتعلم كيفية عمل مستشعر المصد وكيفية استخدام مستشعرات مصد الروبوت VR في مشروع VEXcode VR Python.
مخرجات التعلم
- حدد أن مستشعر المصد هو نوع من المفاتيح التي يمكن الإبلاغ عنها عند الضغط عليها أو عدم الضغط عليها.
- حدد أنه يمكن استخدام مستشعر المصد للتسبب في عمل روبوت الواقع الافتراضي عند الضغط عليه أو عدم الضغط عليه.
- حدد أن left_bumper.pressed و right_bumper.pressed هما أمران يبلغان عن قيمة منطقية حول مستشعر المصد.
- صف سبب استخدام مستشعر المصد في المشروع.
تطبيق
أجهزة الاستشعار ضرورية للروبوتات. لكي يُعتبر روبوت الواقع الافتراضي حقًا روبوتًا، يجب أن يكون قادرًا على الإحساس ببيئته والتفاعل معها. ويشار إلى هذا عادة باسم حلقة قرار → قانون → التفكير المنطقي.

يستخدم روبوت الواقع الافتراضي أجهزة استشعار لجمع البيانات من محيطه (Sense)، واتخاذ القرارات بناءً على هذه المعلومات (Think) وتحويل هذه المعلومات إلى تعليمات للسلوكيات (ACT).
تمكّن المستشعرات روبوت الواقع الافتراضي من التفاعل مع بيئته، وتسمح للمستخدم بإنشاء مشاريع أكثر ديناميكية. تتطلب هذه المشاريع الديناميكية روبوت الواقع الافتراضي للتفاعل والاستجابة للبيئات المتغيرة.
مستشعر المصد
في هذه الوحدة، ستستخدم مستشعر المصد، وهو مستشعر يمكنه اكتشاف التلامس الجسدي. يتم استخدام مستشعر المصد لإبلاغ روبوت الواقع الافتراضي عند ملامسته لجسم أو جدار. يمكن لروبوت الواقع الافتراضي بعد ذلك استخدام المعلومات المبلغ عنها من مستشعر المصد الأيسر أو الأيمن لاتخاذ القرارات.
يحتوي روبوت الواقع الافتراضي على مستشعرين للمصد موجودين في المقدمة.
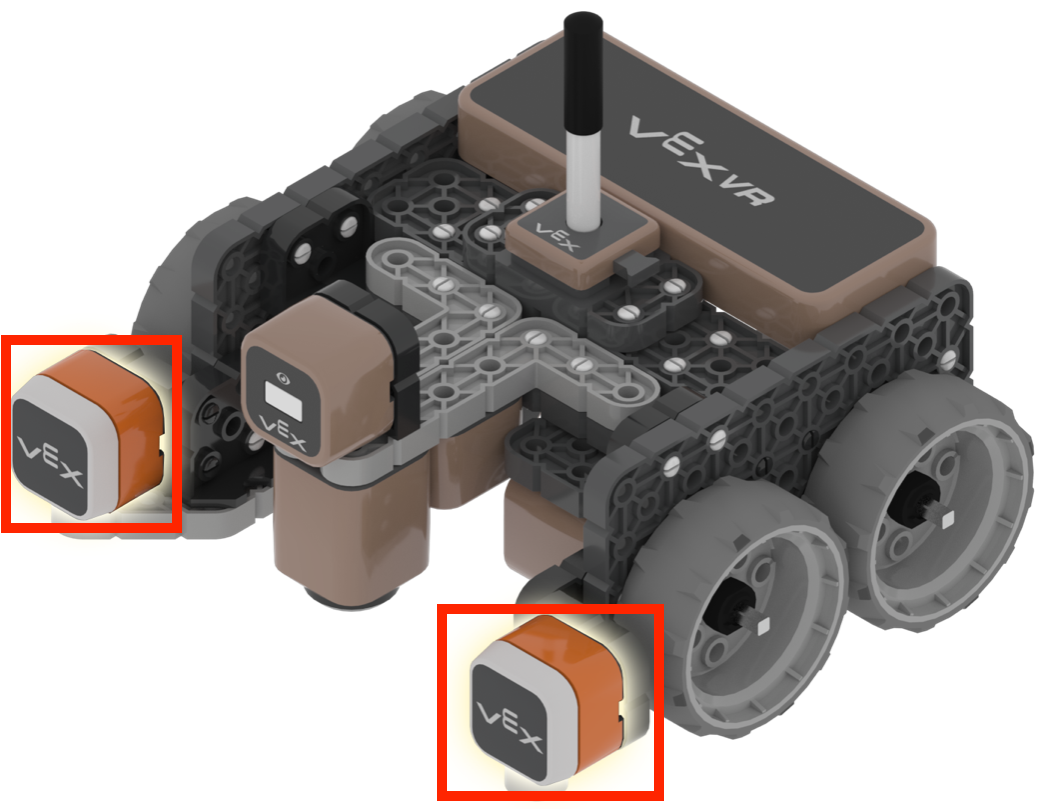
مستشعر المصد هو مفتاح يبلغ عما إذا كان مضغوطًا أو غير مضغوط.
- سيقوم مستشعر المصد بالإبلاغ عن قيمة مستشعر True عند الضغط على مستشعر المصد.
- سيقوم مستشعر المصد بالإبلاغ عن قيمة مستشعر خاطئة عند عدم الضغط على مستشعر المصد.
يتم الضغط على مستشعر الصدمات بواسطة الجدران في متاهة الجدران ساحة اللعب، أو بواسطة الجدران الخارجية المحيطة بساحات اللعب الأخرى.
اقرأ مقالة مستشعر المصد - ميزات الروبوت - VEX VR للحصول على معلومات مفصلة حول كيفية عمل مستشعر المصد.
الأوامر المضغوطة للمصد
يُستخدم مستشعر المصد لتحديد ما إذا كان روبوت الواقع الافتراضي يلمس شيئًا أو جدارًا. يمكن بعد ذلك استخدام هذه البيانات في مشروع حتى يتمكن روبوت الواقع الافتراضي من اتخاذ قرار عند الضغط على مستشعر المصد.
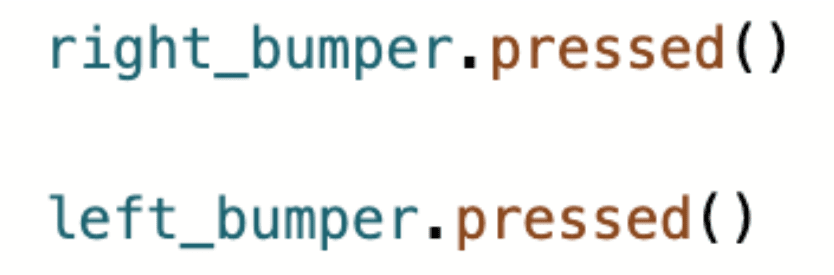
استخدم الأوامر left_bumper.pressed و right_bumper.pressed في مشروع نصي للتحقق من حالة مستشعر Bumper.
Left_bumper.pressed و right_bumper.pressed هي أوامر مراسل منطقية، تبلغ عن True إذا تم الضغط على المصد، و False إذا لم يتم الضغط عليه.
الأوامر left_bumper.pressed و right_bumper.pressed عادةً مع بنية التحكم، مثل حلقة while ، بحيث يمكن لروبوت الواقع الافتراضي استخدام البيانات من مستشعر Bumper لاتخاذ قرار. سوف تتعلم المزيد عن حلقات و في الدرس القادم.
مستشعر المصد ومشكلة متاهة الجدار
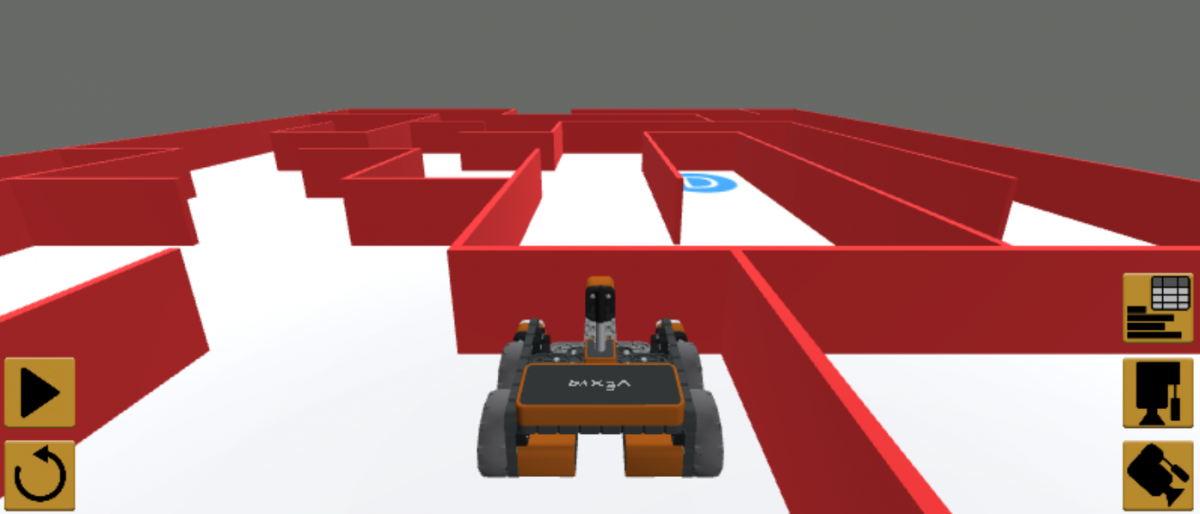
بالتفكير في مشكلة المتاهة الجدارية، فإن الهدف هو الحصول على محرك روبوت الواقع الافتراضي بينما لا يتم الضغط على مستشعر المصد. عند الضغط على مستشعر المصد، يصل روبوت الواقع الافتراضي إلى الحائط، ثم يحتاج إلى التوقف أو التشغيل للاستمرار في المتاهة.
في المثال التالي، سيقود روبوت الواقع الافتراضي للأمام من موقع البداية، حتى يتم الضغط على المصد الأيسر عندما يصل إلى الجدار المقابل. بمجرد الضغط على المصد الأيسر، سيتوقف روبوت الواقع الافتراضي عن القيادة.
ستلاحظ أن لوحة المعلومات تعرض القيمة التي يقوم مستشعر المصد بالإبلاغ عنها في الوقت الفعلي أثناء تشغيل المشروع. عندما لا يتم الضغط على مستشعر المصد، يتم الإبلاغ عن القيمة على أنها خاطئة.
|
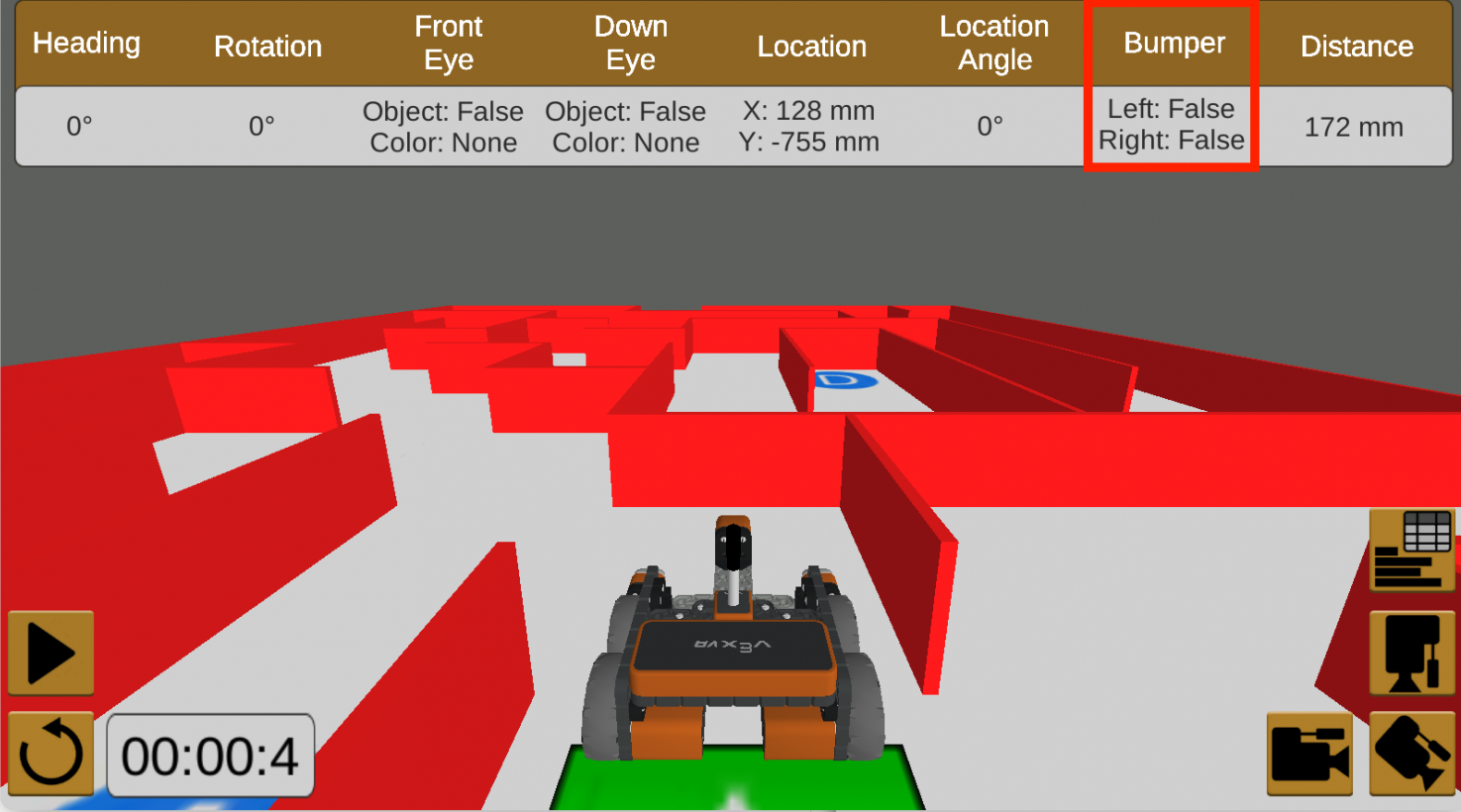 |
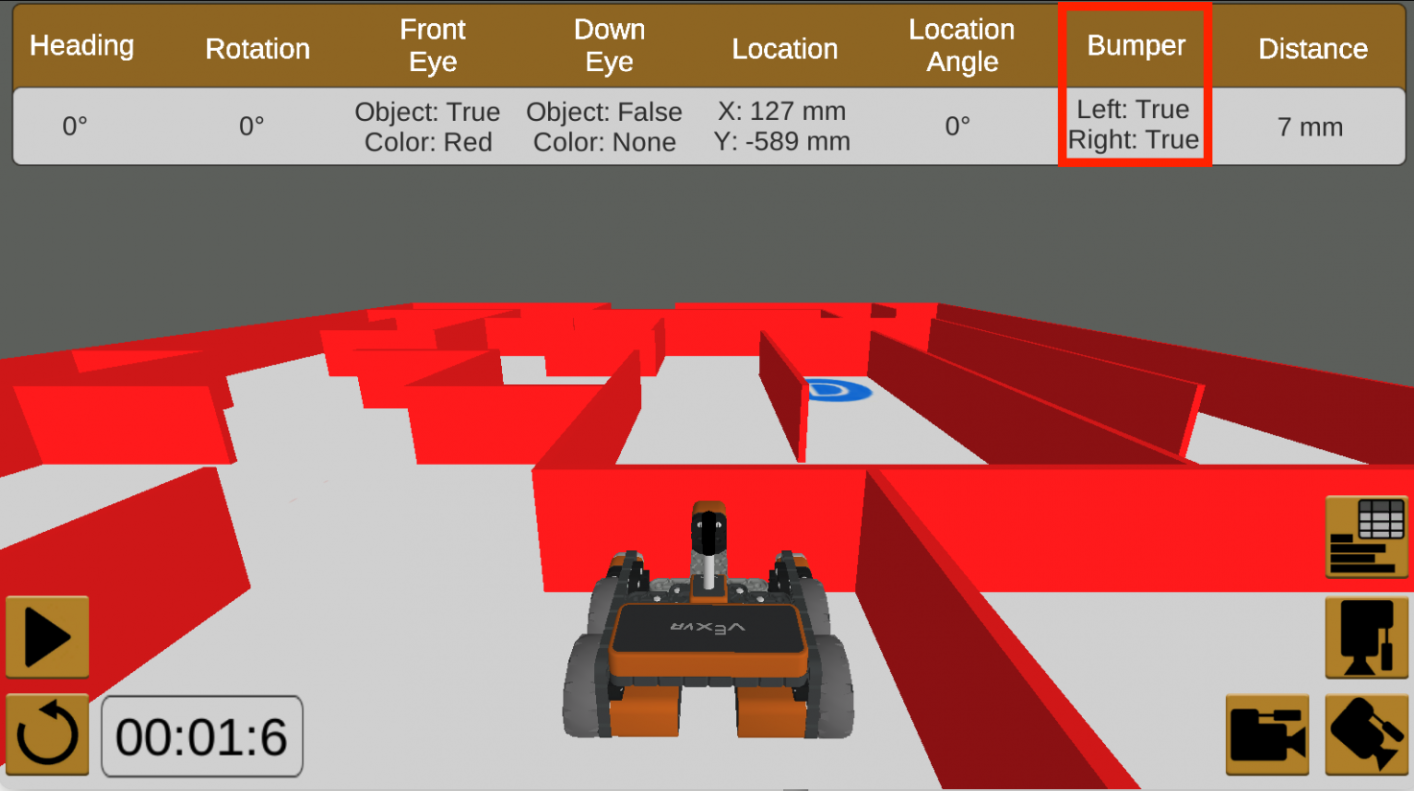
عند الضغط على مستشعر المصد، ويكون روبوت الواقع الافتراضي مقابل الحائط، يتم الإبلاغ عن القيمة على أنها True.
|
 |
يمكنك استخدام لوحة المعلومات في أي وقت، للمساعدة في تصور بيانات المستشعر أثناء تشغيل مشروعك. ملاحظة، يمكن إخفاء لوحة المعلومات وإعادة فتحها في أي وقت، كما هو موضح في هذا الفيديو. في مقطع الفيديو أدناه، يتم تحديد قائمة الهامبرغر في الزاوية العلوية اليسرى من نافذة الملعب لعرض زر لوحة المعلومات أسفلها. ثم يتم تحديد زر لوحة المعلومات ويتم فتح لوحة المعلومات. تتكرر هذه العملية لإغلاق لوحة المعلومات.