
Pelajaran 1: Apa itu Sensor Bumper?
Dalam Pelajaran ini, Anda akan mempelajari apa itu sensor dan mengapa Anda harus menggunakan sensor dengan Robot VR. Sensor pertama yang akan Anda pelajari adalah Bumper Sensor. Anda akan mempelajari cara kerja Bumper Sensor dan cara menggunakan VR Robot Bumper Sensor dalam proyek VEXcode VR Python.
Hasil belajar
- Identifikasi bahwa Bumper Sensor adalah jenis sakelar yang dapat melaporkan saat ditekan atau tidak ditekan.
- Identifikasi bahwa Sensor Bumper dapat digunakan untuk menyebabkan aksi Robot VR saat ditekan atau tidak ditekan.
- Identifikasi bahwa left_bumper.pressed dan right_bumper.pressedadalah perintah yang melaporkan nilai Boolean tentang Bumper Sensor.
- Jelaskan mengapa Bumper Sensor akan digunakan dalam suatu proyek.
Terapkan
Sensor sangat penting bagi robotika. Agar Robot VR benar-benar dianggap sebagai robot, ia harus mampu merasakan dan berinteraksi dengan lingkungannya. Hal ini secara umum disebut sebagai siklus keputusan Sense → Think → Act.
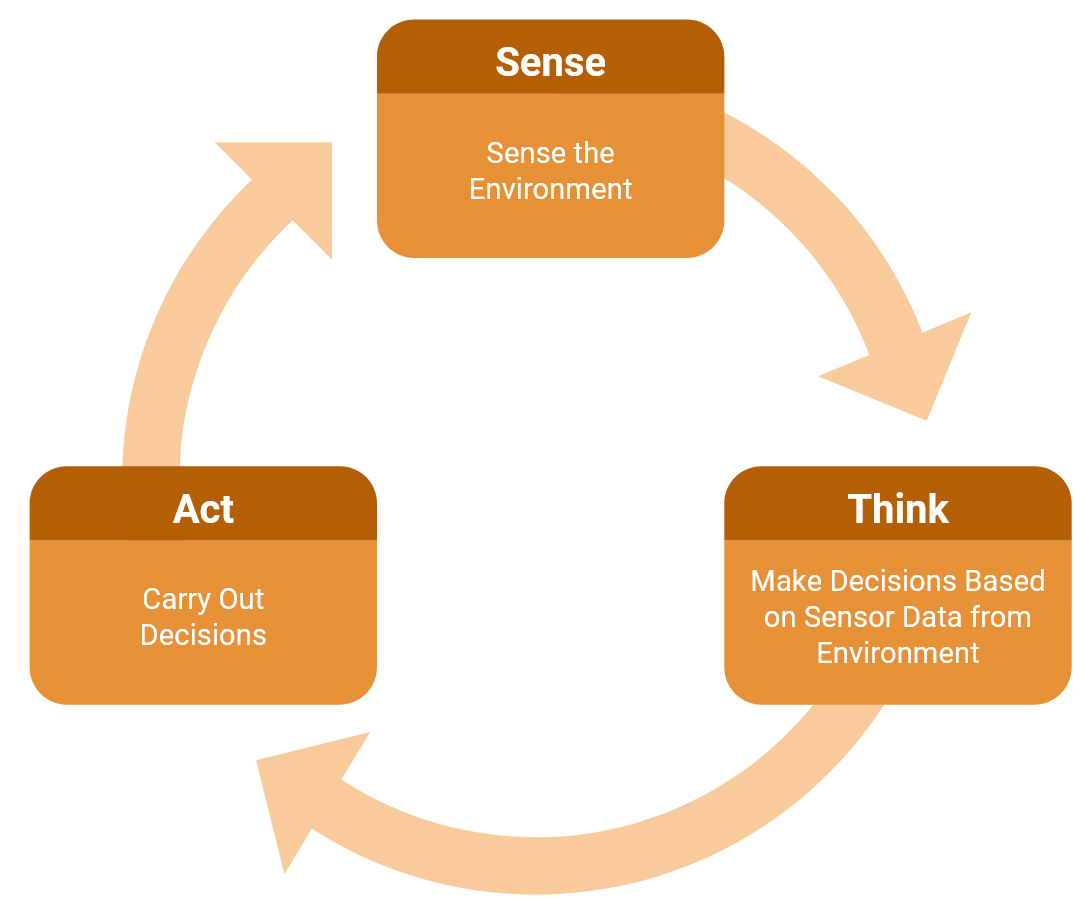
Robot VR menggunakan sensor untuk mengumpulkan data dari lingkungan sekitarnya (Sense), membuat keputusan berdasarkan informasi ini (Think) dan mengubah informasi tersebut menjadi instruksi untuk perilaku (Act).
Sensor memungkinkan Robot VR berinteraksi dengan lingkungannya, dan memungkinkan pengguna membuat proyek yang lebih dinamis. Proyek dinamis ini memerlukan Robot VR untuk berinteraksi dan merespons perubahan lingkungan.
Sensor Bumper
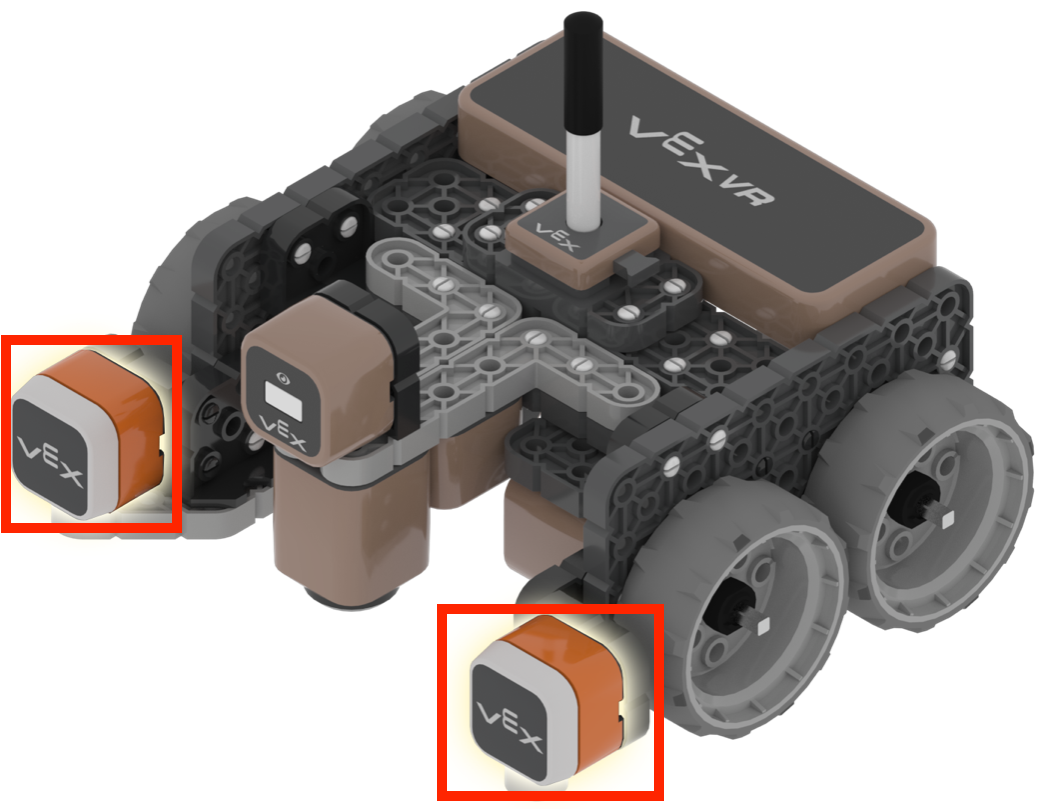
Dalam Unit ini, Anda akan menggunakan Bumper Sensor, sensor yang dapat mendeteksi kontak fisik. Sensor Bumper digunakan untuk memberi tahu Robot VR saat telah melakukan kontak dengan suatu objek atau dinding. Robot VR kemudian dapat menggunakan informasi yang dilaporkan dari Sensor Bumper Kiri atau Kanan untuk membuat keputusan.
Robot VR memiliki dua Sensor Bumper yang terletak di bagian depan.
Sensor Bumper adalah sakelar yang melaporkan jika ditekan atau tidak ditekan.
- Sensor Bumper akan melaporkan nilai sensor Benar saat Sensor Bumper ditekan.
- Sensor Bumper akan melaporkan nilai sensor Salah saat Sensor Bumper tidak ditekan.
Sensor Bumper ditekan oleh dinding di Wall Maze Playground, atau oleh dinding luar yang mengelilingi Playground lainnya.
Baca artikel Bumper Sensor - Fitur Robot - VEX VRuntuk informasi terperinci tentang cara kerja Bumper Sensor.
Perintah Bumper Pressed
Sensor Bumper digunakan untuk menentukan apakah Robot VR menyentuh suatu objek atau dinding. Data tersebut kemudian dapat digunakan dalam suatu proyek sehingga Robot VR dapat membuat keputusan saat Sensor Bumper ditekan.
Gunakan perintah left_bumper.pressed dan right_bumper.presseddalam proyek teks untuk memeriksa kondisi Bumper Sensor.
Left_bumper.pressed dan right_bumper.pressedmerupakan perintah reporter Boolean, yang melaporkanBenarjika Bumper ditekan, dan Salah jika tidak ditekan.
Perintahleft_bumper.pressed dan right_bumper.pressedbiasanya digunakan dengan struktur Kontrol, seperti loopwhile, sehingga Robot VR dapat menggunakan data dari Sensor Bumper untuk membuat keputusan. Anda akan mempelajari lebih lanjut tentang perulangansementarapada Pelajaran berikutnya.
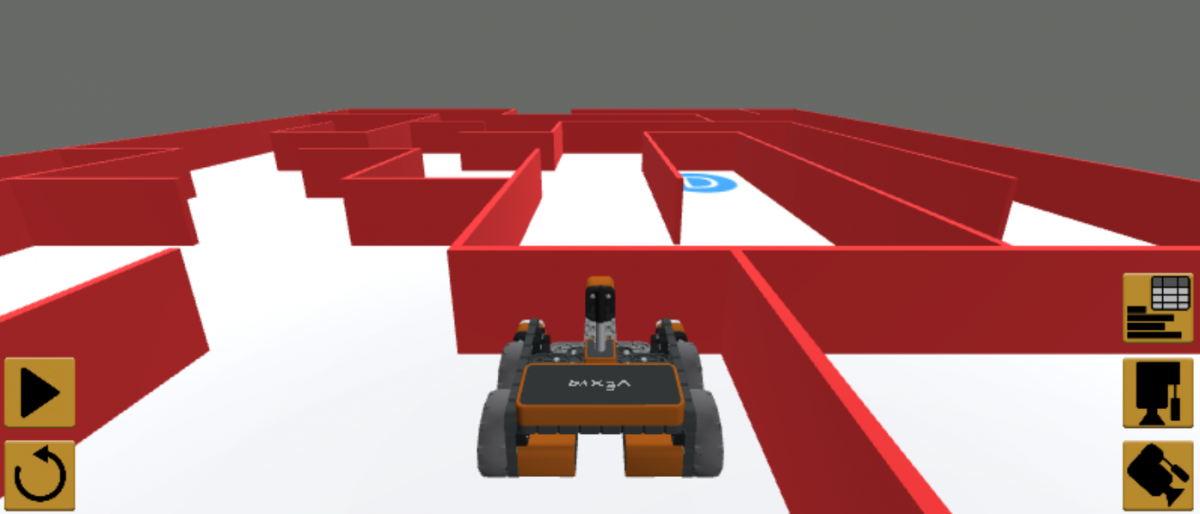
Sensor Bumper dan Masalah Labirin Dinding
Berpikir tentang Masalah Labirin Dinding, tujuannya adalah agar Robot VR dapat melaju sementara Sensor Bumper tidak ditekan. Saat Sensor Bumper ditekan, Robot VR telah mencapai dinding, dan kemudian perlu berhenti atau berputar untuk melanjutkan perjalanan di labirin.
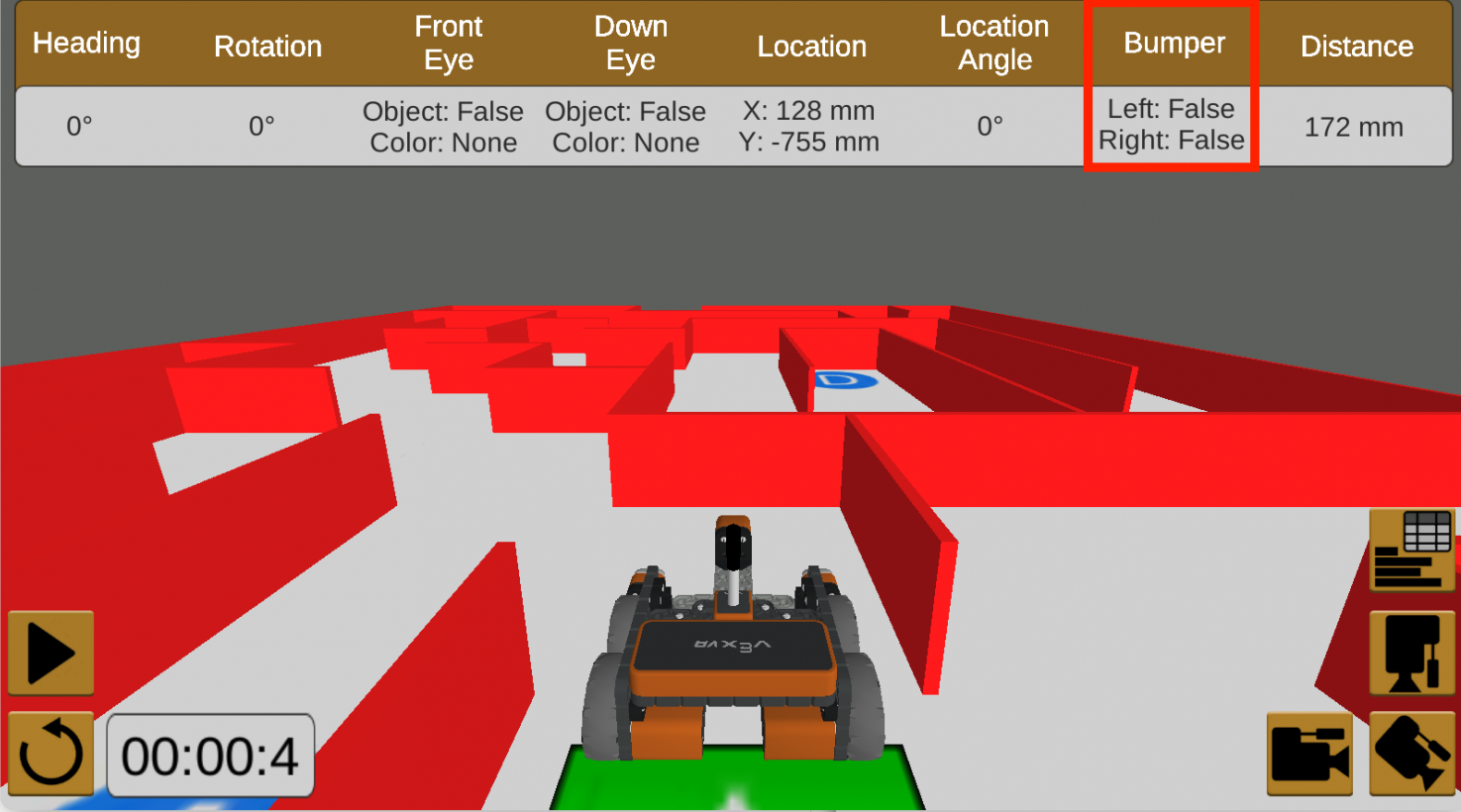
Dalam contoh berikut, Robot VR akan melaju maju dari lokasi awal, hingga Bumper Kiri ditekan saat mencapai dinding di seberangnya. Setelah Bumper Kiri ditekan, Robot VR akan berhenti melaju.
Anda akan melihat bahwa Dasbor menampilkan nilai yang dilaporkan Sensor Bumper secara real-time saat proyek dijalankan. Bila Bumper Sensor tidak ditekan, nilainya dilaporkan sebagai Salah.
|
 |
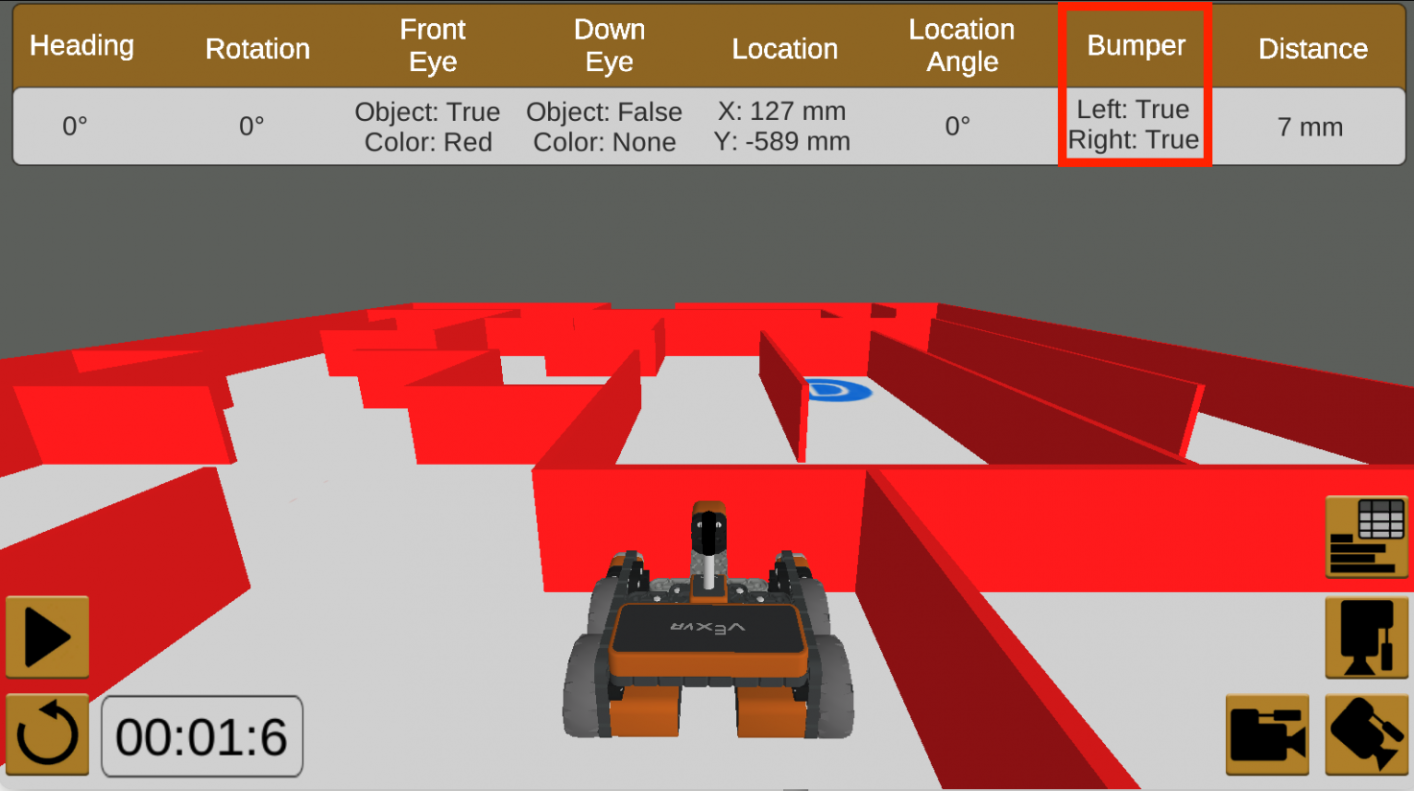
Saat Bumper Sensor ditekan, dan Robot VR menempel di dinding, nilainya dilaporkan sebagai Benar.
|
 |
Anda dapat menggunakan Dasbor kapan saja, untuk membantu memvisualisasikan data sensor saat proyek Anda berjalan. Perhatikan, Dasbor dapat disembunyikan dan dibuka kembali kapan saja, seperti yang ditunjukkan dalam video ini. Dalam klip video di bawah, menu hamburger di sudut kiri atas jendela Playground dipilih untuk menampilkan tombol Dashboard di bawahnya. Kemudian tombol Dashboard dipilih dan Dashboard terbuka. Proses ini diulang untuk menutup Dashboard.