
Lección 1: ¿Qué es un sensor de parachoques?
En esta lección, aprenderás qué es un sensor y por qué usarías sensores con un robot de realidad virtual. El primer sensor que aprenderá es el sensor de parachoques. Aprenderás cómo funciona el sensor de parachoques y cómo usar los sensores de parachoques del robot VR en un proyecto de Python VR de VEXcode.
Resultados de aprendizaje
- Identifique que el sensor de parachoques es un tipo de interruptor que puede informar cuando se pulsa o no se pulsa.
- Identifique que el sensor de parachoques se puede utilizar para provocar una acción de robot VR cuando se pulsa o no se pulsa.
- Identifique que left_bumper.pressed y right_bumper.pressed son comandos que informan un valor booleano sobre el sensor del parachoques.
- Describa por qué se usaría el sensor de parachoques en un proyecto.
Aplicar
Los sensores son esenciales para la robótica. Para que un robot de realidad virtual sea realmente considerado un robot, debe ser capaz de sentir e interactuar con su entorno. Esto se conoce comúnmente como el bucle de decisión de la → Ley Sense → Think.
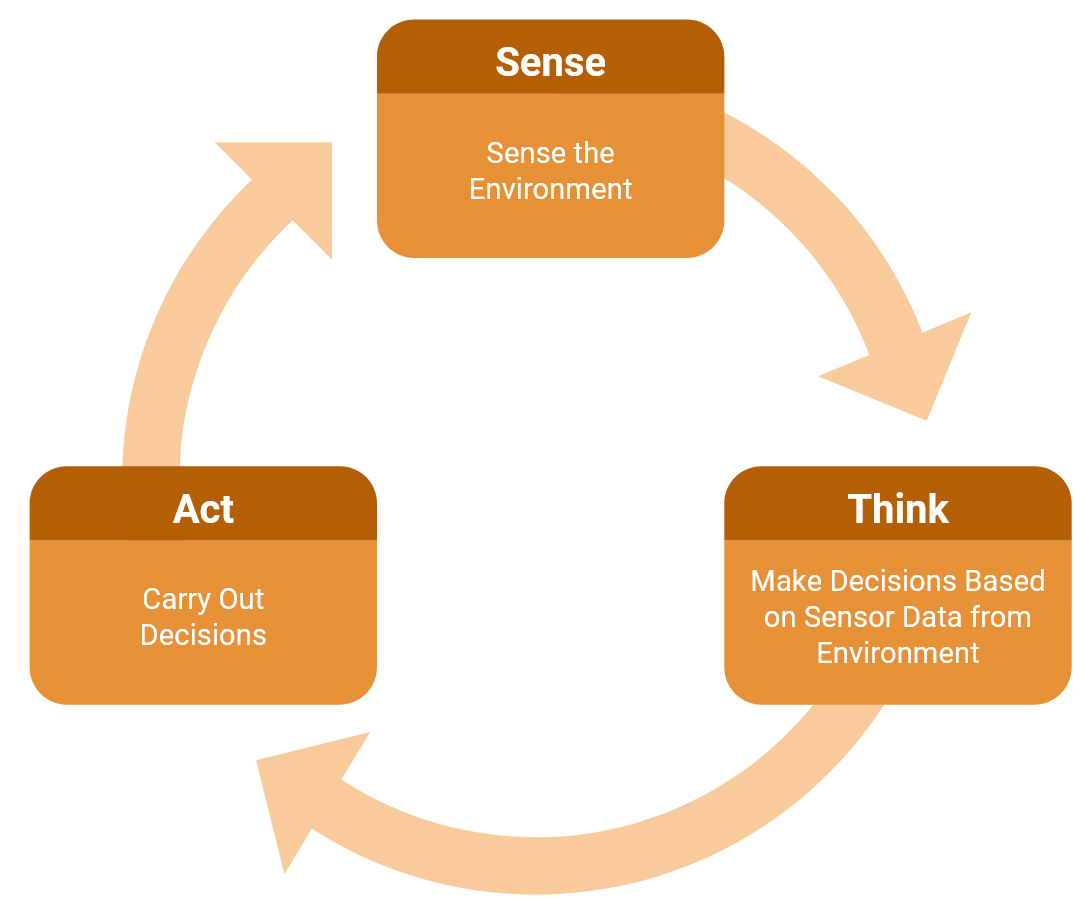
Un robot de realidad virtual utiliza sensores para recopilar datos de su entorno (Sense), tomar decisiones basadas en esta información (Think) y convertir esa información en instrucciones para comportamientos (Act).
Los sensores permiten que un robot de realidad virtual interactúe con su entorno y permiten al usuario crear proyectos más dinámicos. Estos proyectos dinámicos requieren un robot de realidad virtual para interactuar y responder a entornos cambiantes.
El sensor del parachoques
En esta unidad, utilizará el sensor de parachoques, un sensor que puede detectar el contacto físico. El sensor de parachoques se utiliza para informar a un robot de realidad virtual cuando ha hecho contacto con un objeto o pared. Un robot de realidad virtual puede utilizar la información informada desde el sensor del parachoques izquierdo o derecho para tomar decisiones.
El VR Robot tiene dos sensores de parachoques ubicados en la parte delantera.
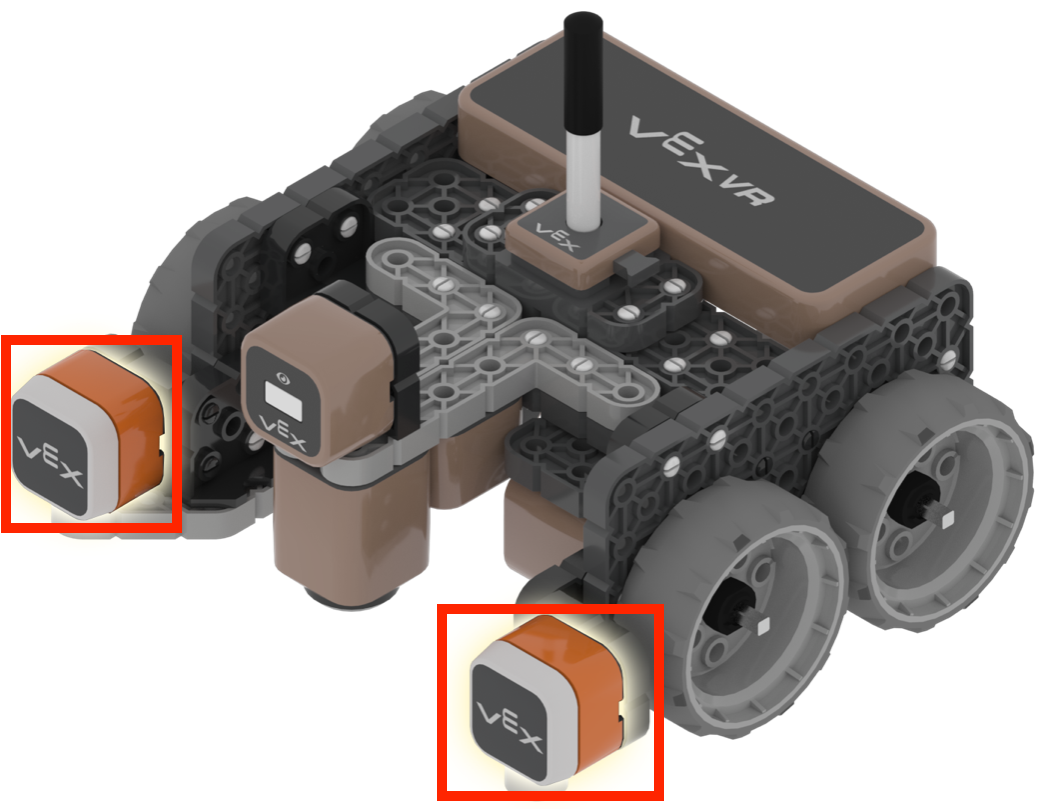
Un sensor de parachoques es un interruptor que informa si se pulsa o no.
- El sensor de parachoques informará un valor de sensor de Verdadero cuando se pulse el sensor de parachoques.
- El sensor del parachoques informará un valor del sensor de Falso cuando no se pulse el sensor del parachoques.
El sensor de parachoques es presionado por las paredes en el laberinto de paredes del patio de juegoso por las paredes exteriores que rodean otros patios de juegos.
Lea el artículo Sensor de parachoques - Características del robot - VEX VR para obtener información detallada sobre cómo funciona el sensor de parachoques.
Comandos pulsados del parachoques
El sensor de parachoques se utiliza para determinar si el robot VR está tocando un objeto o una pared. Esos datos se pueden utilizar en un proyecto para que el robot de realidad virtual pueda tomar una decisión cuando se pulsa el sensor de parachoques.
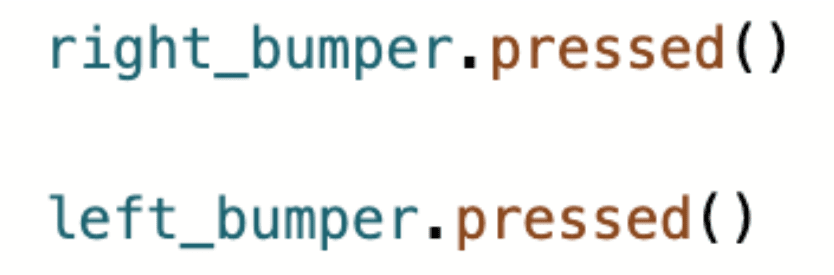
Utilice los comandos left_bumper.pressed y right_bumper.pressed en un proyecto de texto para verificar la condición del sensor de parachoques.
Left_bumper.pressed y right_bumper.pressed son comandos informadores booleanos, que informan True si se pulsa elparachoques y False si no se pulsa.
Los comandos left_bumper.pressed y right_bumper.pressed normalmente se con una estructura de control, como un bucle while , de modo que el robot VR pueda usar los datos del sensor de parachoques para tomar una decisión. Aprenderá más sobre los bucles mientras en la próxima lección.
El sensor del parachoques y el problema del laberinto de pared
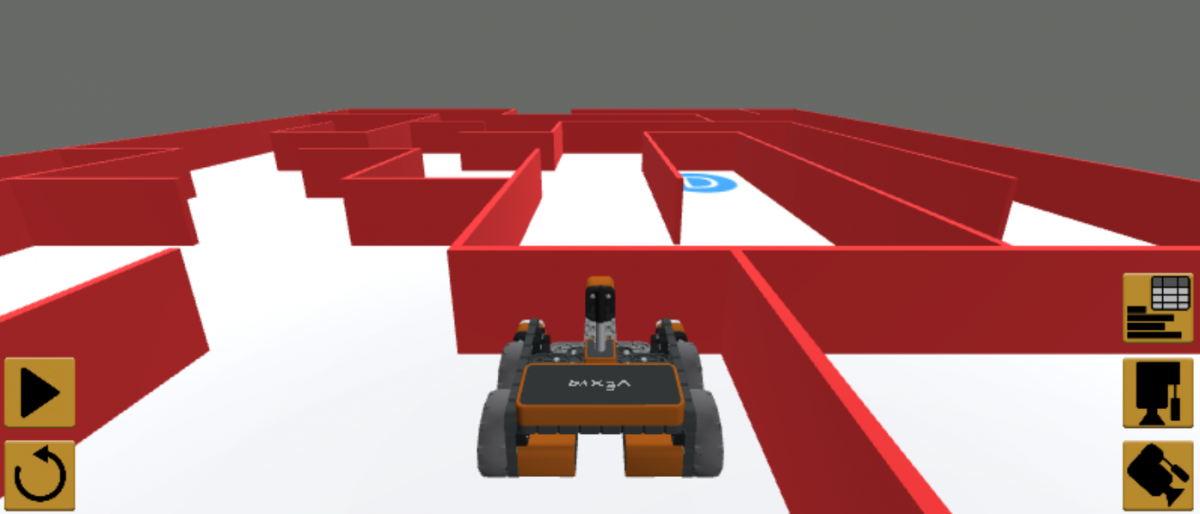
Pensando en el problema del laberinto de pared, el objetivo es tener la unidad VR Robot mientras no se presiona el sensor de parachoques. Cuando se presiona el sensor del parachoques, el robot VR ha alcanzado una pared y luego debe detenerse o encenderse para continuar en el laberinto.
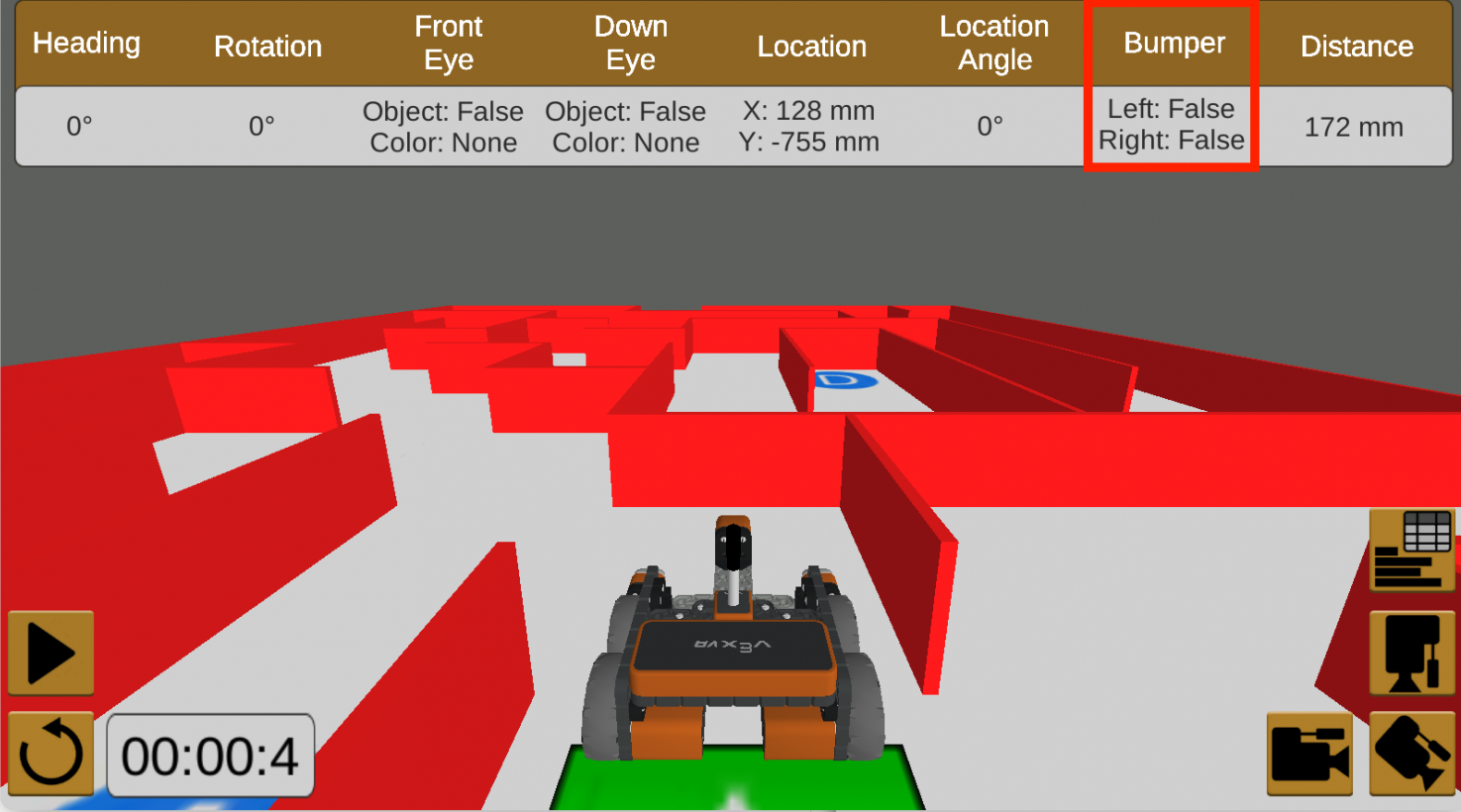
En el siguiente ejemplo, el robot VR avanzará desde la ubicación de inicio, hasta que se presione el parachoques izquierdo cuando llegue a la pared opuesta. Una vez pulsado el parachoques izquierdo, el robot VR dejará de funcionar.
Notará que el panel muestra el valor que el sensor del parachoques informa en tiempo real a medida que se ejecuta el proyecto. Cuando no se pulsa el sensor del parachoques, el valor se informa como Falso.
|
 |
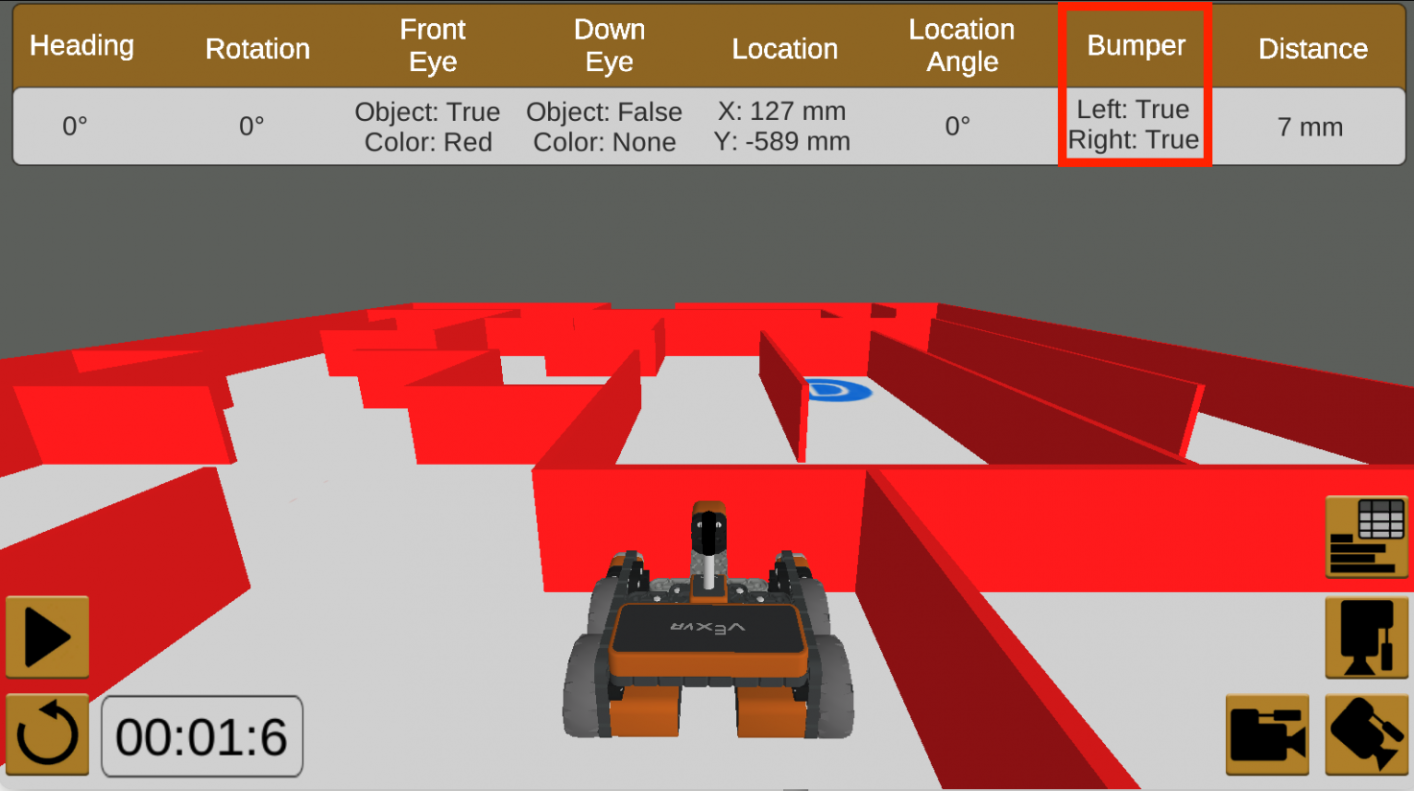
Cuando se pulsa el sensor del parachoques y el robot VR está contra la pared, el valor se informa como Verdadero.
|
 |
Puede usar el Panel de control en cualquier momento para ayudar a visualizar los datos del sensor a medida que se ejecuta su proyecto. Ten en cuenta que el panel de control se puede ocultar y volver a abrir en cualquier momento, como se muestra en este vídeo. En el videoclip a continuación, se selecciona el menú de hamburguesas en la esquina superior izquierda de la ventana Playground para mostrar el botón Dashboard debajo de él. A continuación, se selecciona el botón Panel de control y se abre el Panel de control. Este proceso se repite para cerrar el panel de control.
Preguntas
Seleccione un enlace a continuación para acceder al cuestionario de la lección.
Google Doc / .docx / .pdf