
Leçon 1 : Qu'est-ce qu'un capteur de pare-chocs ?
Dans cette leçon, vous apprendrez ce qu'est un capteur et pourquoi vous utiliseriez des capteurs avec un robot VR. Le premier capteur que vous découvrirez est le capteur de pare-chocs. Vous apprendrez comment fonctionne le capteur de pare-chocs et comment utiliser les capteurs de pare-chocs VR Robot dans un projet VEXcode VR Python.
Résultats d'apprentissage
- Identifiez que le capteur de pare-chocs est un type d'interrupteur qui peut signaler lorsqu'il est pressé ou non pressé.
- Identifiez que le capteur de pare-chocs peut être utilisé pour provoquer une action de robot VR lorsqu'il est pressé ou non pressé.
- Identifiez que left_bumper.pressed et right_bumper.pressed sont des commandes qui rapportent une valeur booléenne sur le capteur de pare-chocs.
- Décrivez pourquoi le capteur de pare-chocs serait utilisé dans un projet.
Appliquer
Les capteurs sont essentiels à la robotique. Pour qu'un robot VR soit vraiment considéré comme un robot, il doit être capable de détecter et d'interagir avec son environnement. Ceci est communément appelé la boucle de décision Sense → Think → Act.
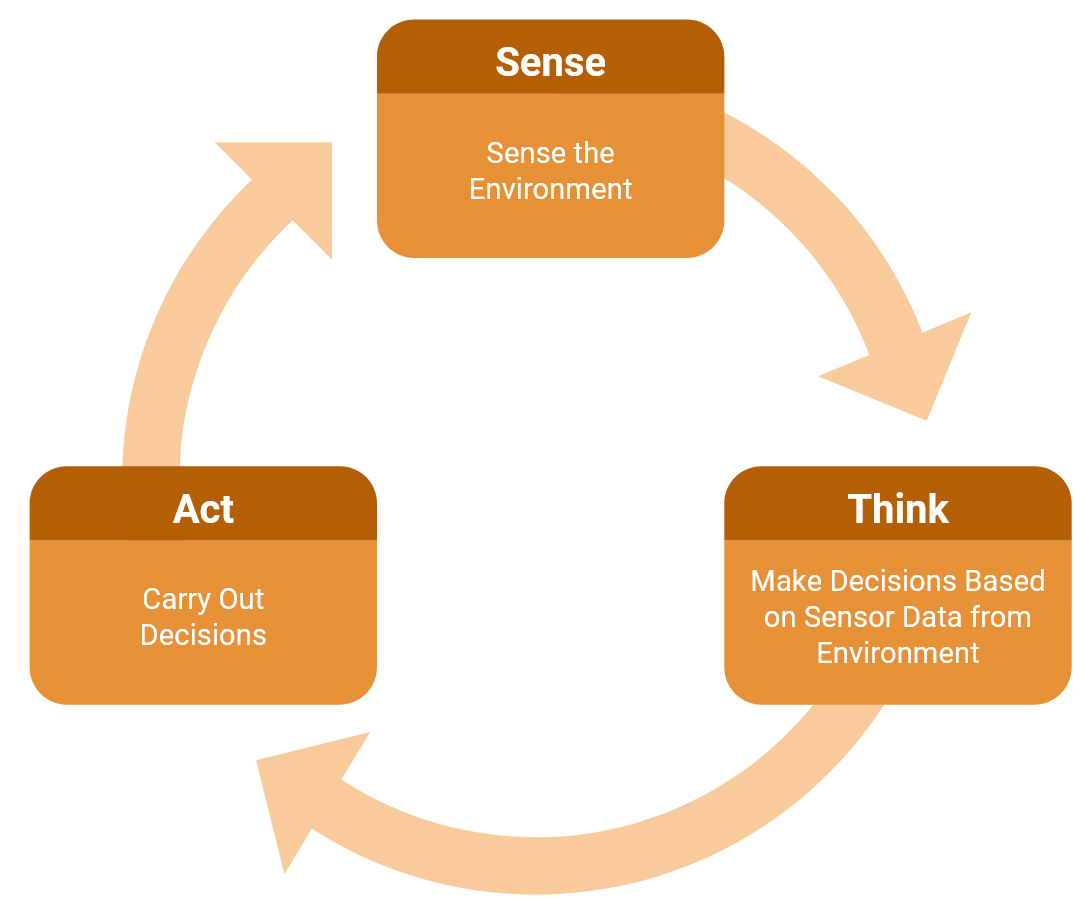
Un robot VR utilise des capteurs pour collecter des données de son environnement (Sense), prendre des décisions en fonction de ces informations (Think) et transformer ces informations en instructions de comportements (Act).
Les capteurs permettent à un robot VR d'interagir avec son environnement et permettent à l'utilisateur de créer des projets plus dynamiques. Ces projets dynamiques nécessitent un robot VR pour interagir et répondre aux environnements changeants.
Le capteur de pare-chocs
Dans cette unité, vous utiliserez le capteur de pare-chocs, un capteur qui peut détecter un contact physique. Le capteur de pare-chocs est utilisé pour informer un robot VR lorsqu'il a été en contact avec un objet ou un mur. Un robot VR peut ensuite utiliser les informations rapportées par le capteur de pare-chocs gauche ou droit pour prendre des décisions.
Le robot VR dispose de deux capteurs de pare-chocs situés à l'avant.
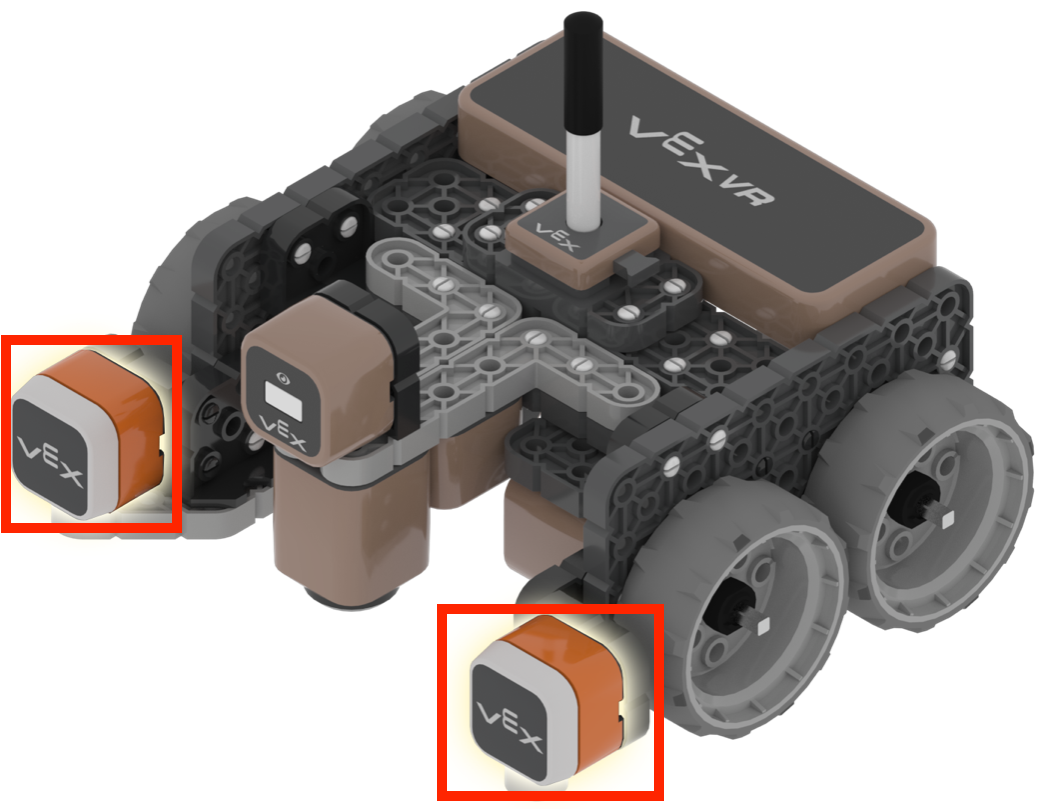
Un capteur de pare-chocs est un commutateur qui indique s'il est enfoncé ou non.
- Le capteur de pare-chocs signalera une valeur de capteur de True lorsque le capteur de pare-chocs est enfoncé.
- Le capteur de pare-chocs signalera une valeur de capteur de Faux lorsque le capteur de pare-chocs n'est pas enfoncé.
Le capteur de pare-chocs est pressé par les murs du labyrinthe mural aire de jeux, ou par les murs extérieurs entourant d'autres aires de jeux.
Lisez l'article Bumper Sensor - Robot Features - VEX VR pour obtenir des informations détaillées sur le fonctionnement du capteur de pare-chocs.
Commandes pressées du pare-chocs
Le capteur de pare-chocs est utilisé pour déterminer si le robot VR touche un objet ou un mur. Ces données peuvent ensuite être utilisées dans un projet afin que le robot VR puisse prendre une décision lorsque le capteur de pare-chocs est enfoncé.
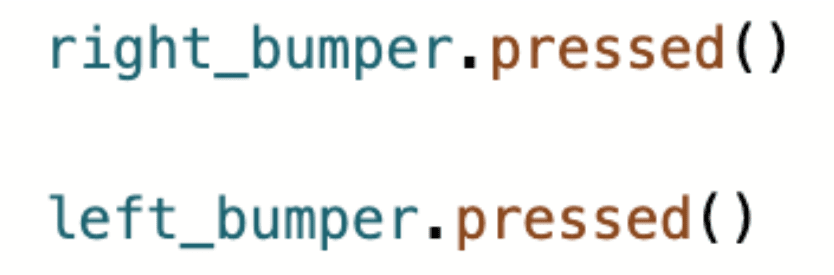
Utilisez les commandes left_bumper.pressed et right_bumper.pressed dans un projet texte pour vérifier l'état du capteur de pare-chocs.
Left_bumper.pressed et right_bumper.pressed sont des commandes de rapporteur booléen, qui signalent True si le pare-chocs est enfoncé, et False s'il n'est pas enfoncé.
Les commandes left_bumper.pressed et right_bumper.pressed sont généralement utilisées avec une structure de contrôle, comme une boucle while , afin que le robot VR puisse utiliser les données du capteur de pare-chocs pour prendre une décision. Vous en apprendrez davantage sur les boucles tandis que dans la prochaine leçon.
Le capteur de pare-chocs et le problème du labyrinthe mural
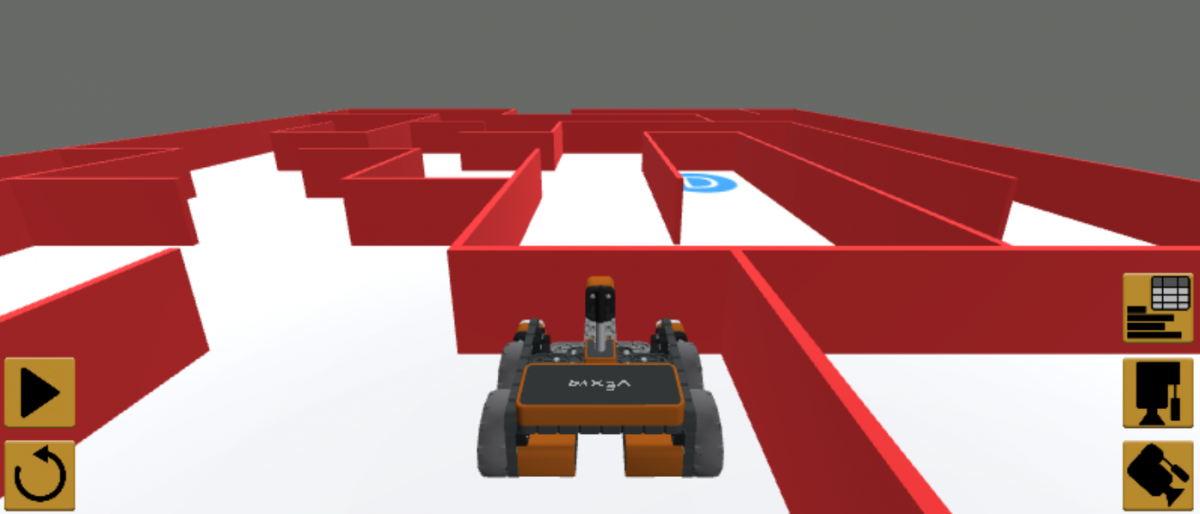
En ce qui concerne le problème du labyrinthe mural, l'objectif est d'avoir le lecteur VR Robot lorsque le capteur de pare-chocs n'est pas enfoncé. Lorsque le capteur de pare-chocs est enfoncé, le robot VR a atteint un mur, puis doit s' arrêter ou tourner pour continuer dans le labyrinthe.
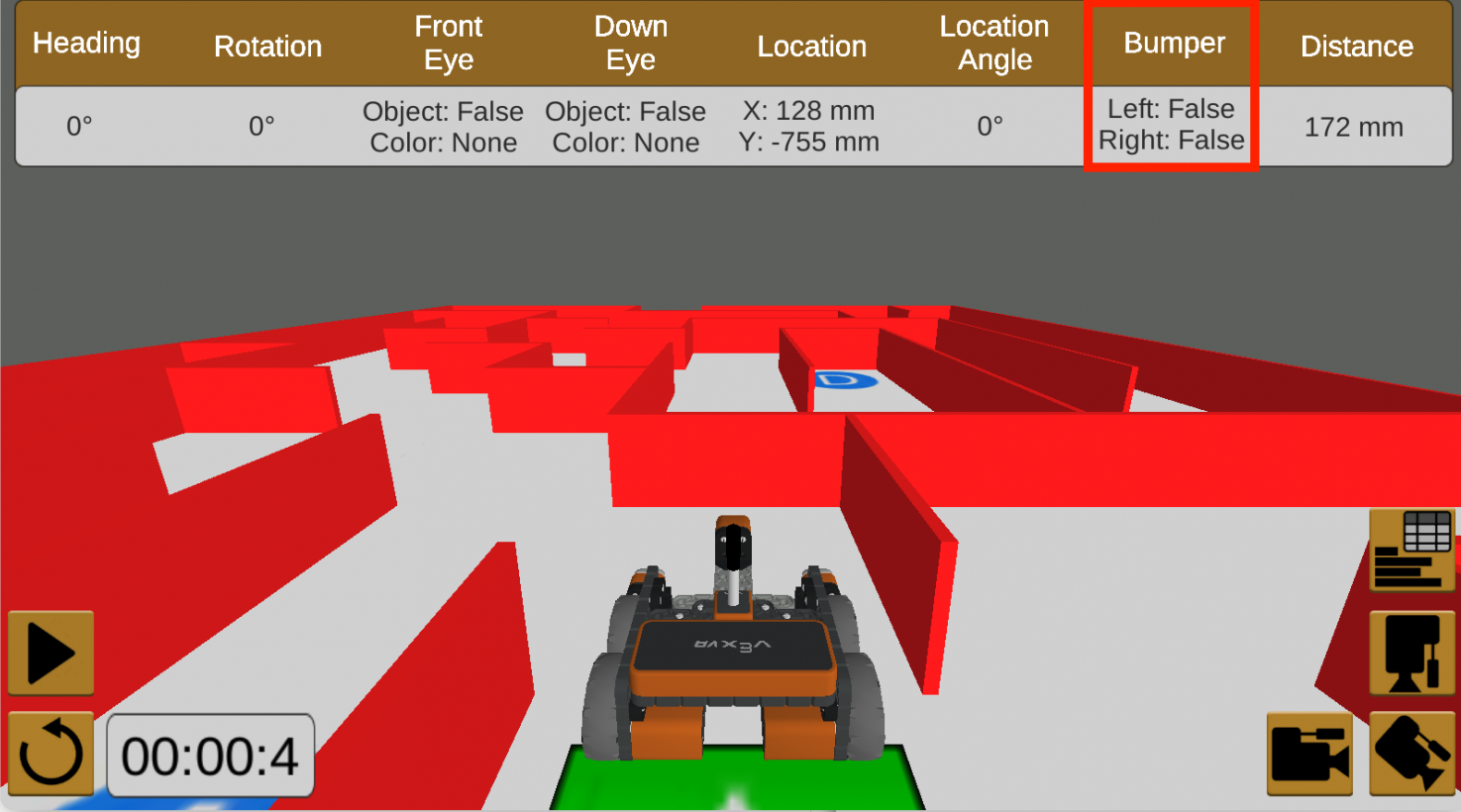
Dans l'exemple suivant, le robot VR avancera à partir de l'emplacement de départ, jusqu'à ce que le pare-chocs gauche soit enfoncé lorsqu'il atteindra le mur opposé. Une fois que le pare-chocs gauche est enfoncé, le robot VR arrête de conduire.
Vous remarquerez que le tableau de bord affiche la valeur signalée par le capteur de pare-chocs en temps réel pendant l'exécution du projet. Lorsque le capteur de pare-chocs n'est pas enfoncé, la valeur est signalée comme fausse.
|
 |
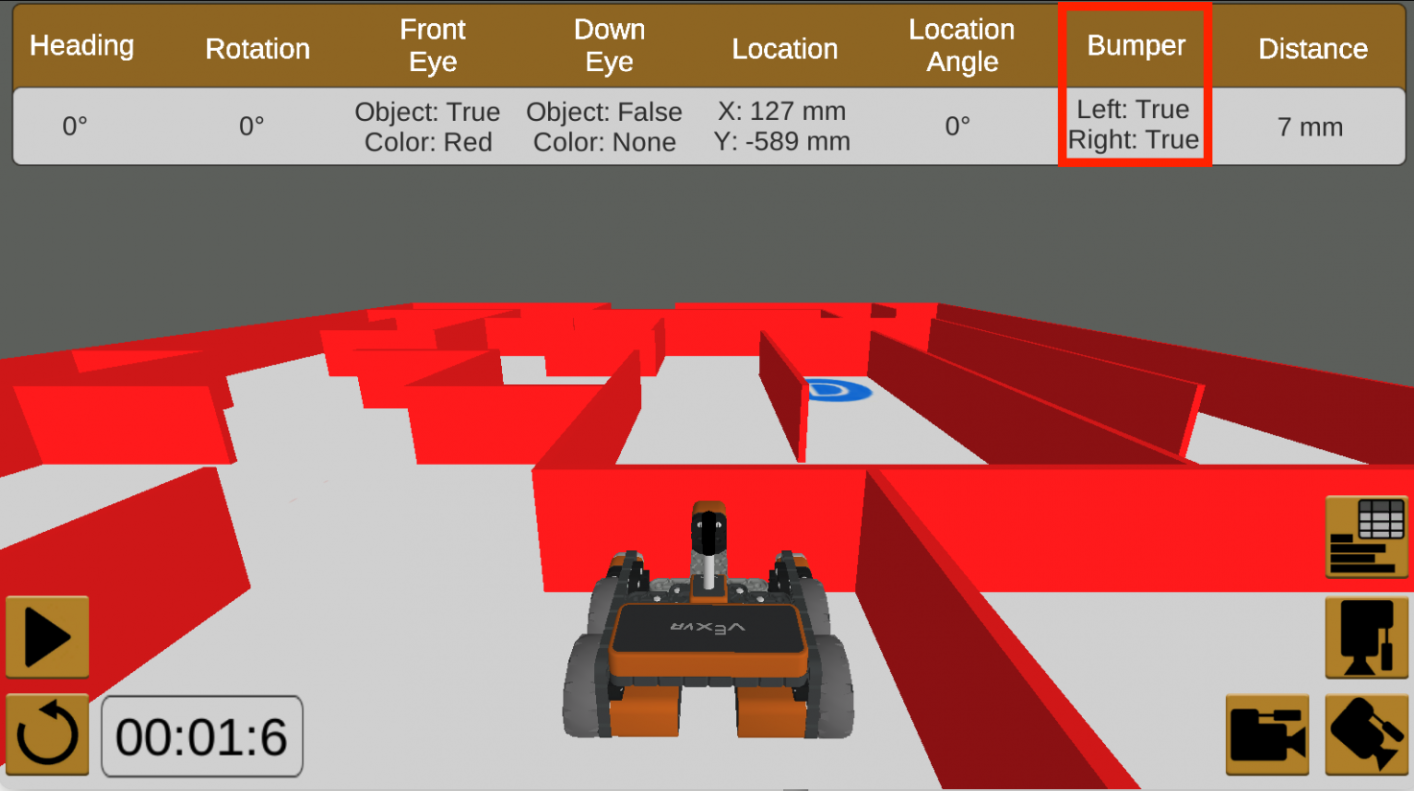
Lorsque le capteur de pare-chocs est enfoncé et que le robot VR est contre le mur, la valeur est indiquée comme vraie.
|
 |
Vous pouvez utiliser le tableau de bord à tout moment pour visualiser les données des capteurs pendant le déroulement de votre projet. Notez que le tableau de bord peut être masqué et rouvert à tout moment, comme le montre cette vidéo. Dans le clip vidéo ci-dessous, le menu hamburger dans le coin supérieur gauche de la fenêtre Playground est sélectionné pour afficher le bouton Dashboard en dessous. Le bouton Tableau de bord est ensuite sélectionné et le tableau de bord s'ouvre. Ce processus est répété pour fermer le tableau de bord.
Questions
Veuillez sélectionner un lien ci-dessous pour accéder au questionnaire de la leçon.
Google Doc / .docx / .pdf