
Lição 1: O que é um sensor de para-choque?
Nesta lição, você aprenderá o que é um sensor e por que usaria sensores com um robô de RV. O primeiro sensor que você aprenderá é o Bumper Sensor. Você aprenderá como o Bumper Sensor funciona e como usar os VR Robot Bumper Sensors em um projeto VEXcode VR Python.
Resultados de Aprendizagem
- Identificar que o Bumper Sensor é um tipo de interruptor que pode reportar quando pressionado ou não pressionado.
- Identifique se o sensor de pára-choques pode ser usado para causar uma ação do robô VR quando pressionado ou não pressionado.
- Identifique que left_bumper.pressed e right_bumper.pressed são comandos que relatam um valor booleano sobre o sensor do para-choque.
- Descreva porque é que o Sensor de Para-choques seria usado num projeto.
Aplicar
Os sensores são essenciais para a robótica. Para que um robô VR seja realmente considerado um robô, ele deve ser capaz de sentir e interagir com seu ambiente. Isso é comumente referido como o ciclo de decisão do Sense → Think → Act.
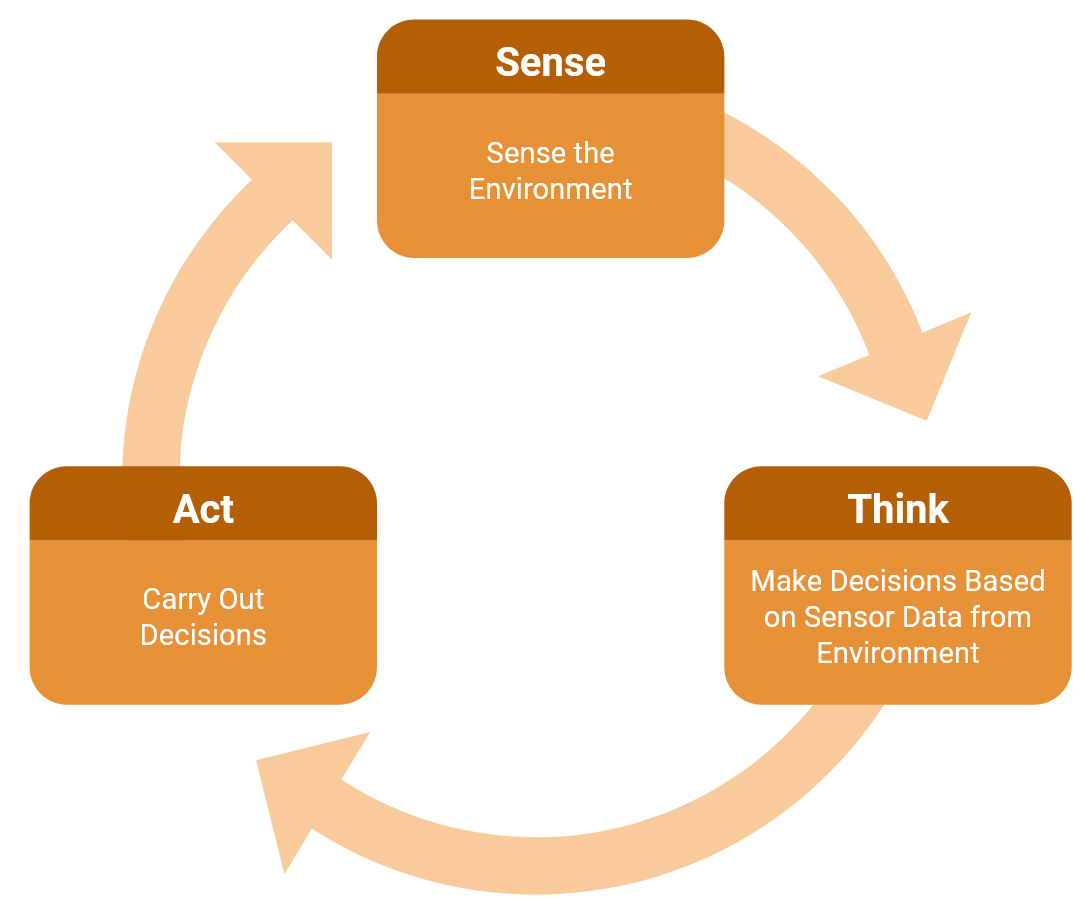
Um Robô de RV usa sensores para coletar dados de seu entorno (Sentido), tomar decisões com base nessas informações (Pensar) e transformar essas informações em instruções para comportamentos (Agir).
Os sensores permitem que um Robô VR interaja com o seu ambiente e permitem que o utilizador crie projetos mais dinâmicos. Esses projetos dinâmicos exigem um robô de RV para interagir e responder a ambientes em mudança.
O sensor do para-choques
Nesta Unidade, irá utilizar o Sensor de Para-choques, um sensor que pode detetar o contacto físico. O Sensor de Para-choques é usado para informar um Robô VR quando ele faz contato com um objeto ou parede. Um Robô VR pode então usar as informações relatadas do Sensor do Para-choque Esquerdo ou Direito para tomar decisões.
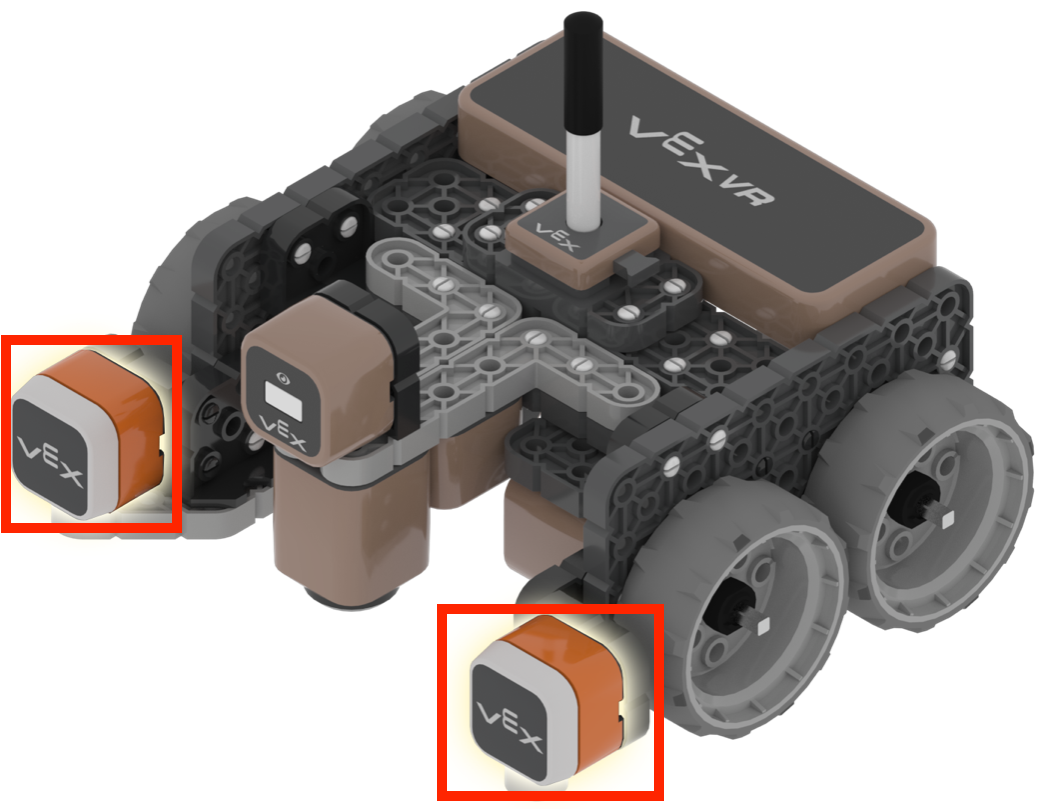
O Robô VR possui dois Sensores Pára-choques localizados na frente.
Um sensor de pára-choques é um interruptor que informa se está pressionado ou não.
- O Sensor do Para-choque informará um valor do sensor de Verdadeiro quando o Sensor do Para-choque for pressionado.
- O Sensor do Para-choque informará um valor do sensor de Falso quando o Sensor do Para-choque não for pressionado.
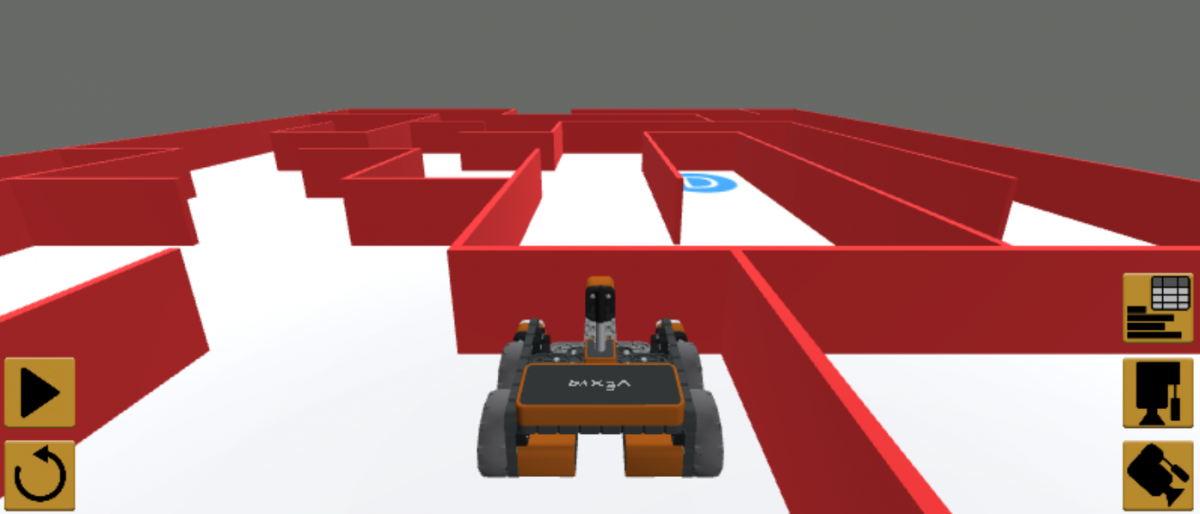
O Sensor de Pára-choques é pressionado pelas paredes do Wall Maze Playgroundou pelas paredes exteriores que rodeiam outros Playgrounds.
Leia o artigo Sensor de pára-choques - Características do robô - VEX VR para obter informações detalhadas sobre o funcionamento do sensor de pára-choques.
Comandos Prensados do Para-choques
O Sensor de Para-choques é usado para determinar se o Robô VR está a tocar num objeto ou parede. Esses dados podem então ser usados em um projeto para que o Robô VR possa tomar uma decisão quando o Sensor de Para-choque for pressionado.
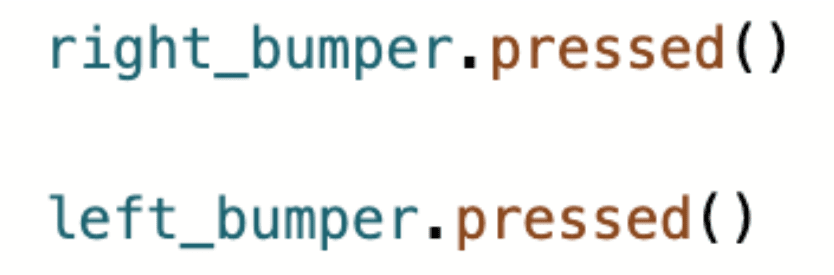
Utilize os comandos left_bumper.pressed e right_bumper.pressed num projeto de texto para verificar o estado do sensor de pára-choques.
Left_bumper.pressed e right_bumper.pressed são comandos booleanos do repórter, que reportam True se o Bumper estiver pressionadoe False se estiver não pressionado.
Os comandos left_bumper.pressed e right_bumper.pressed são normalmente utilizados com uma estrutura de controlo, como um ciclo while , para que o robô VR possa utilizar os dados do Sensor de pára-choques para tomar uma decisão. Você aprenderá mais sobre os loops while na próxima lição.
O Sensor de Para-choque e o Problema do Labirinto de Parede
Pensando no Problema do Labirinto de Parede, o objetivo é fazer com que o Robô VR dirija enquanto o Sensor de Para-choque não estiver pressionado. Quando o Sensor de Para-choques é pressionado, o Robô VR atinge uma parede e, em seguida, precisa parar ou girar para continuar no labirinto.
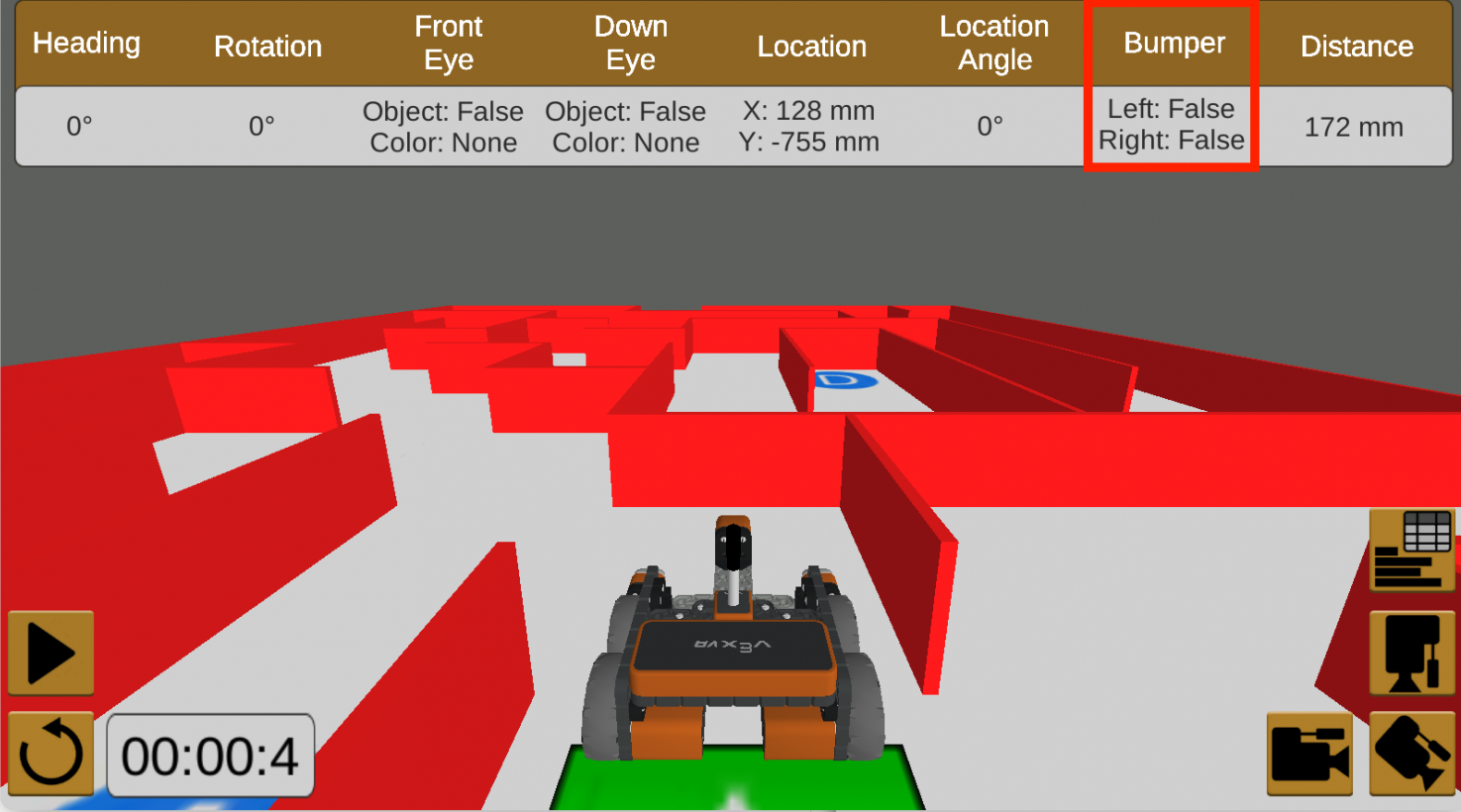
No exemplo a seguir, o Robô VR avançará a partir do local de partida, até que o Para-choque Esquerdo seja pressionado quando atingir a parede oposta. Assim que o Para-choque Esquerdo for pressionado, o Robô VR parará de dirigir.
Você notará que o Painel exibe o valor que o Sensor de Para-choques está relatando em tempo real à medida que o projeto é executado. Quando o Sensor do Para-choques não é pressionado, o valor é relatado como Falso.
|
 |
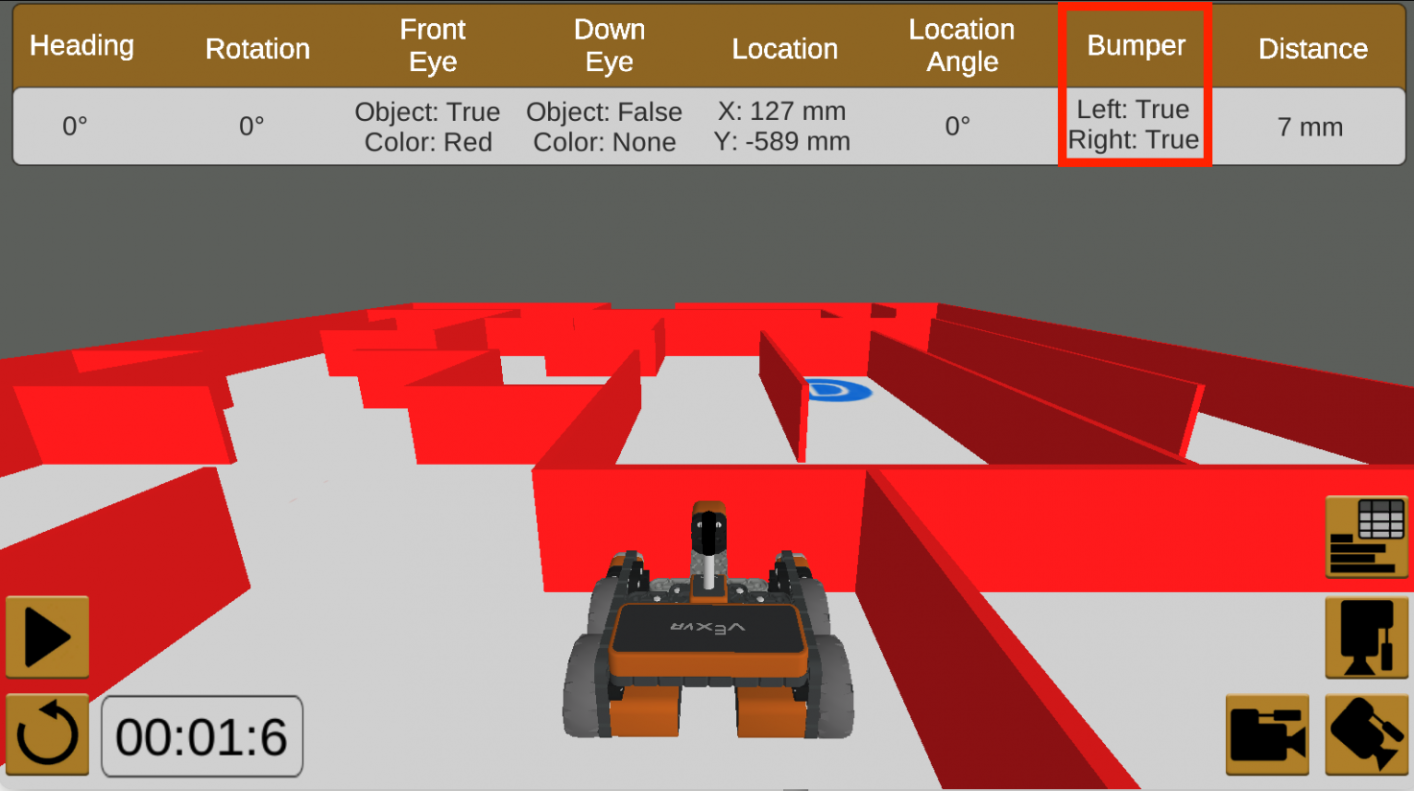
Quando o Sensor do Para-choque é pressionado e o Robô VR está contra a parede, o valor é relatado como Verdadeiro.
|
 |
Você pode usar o Painel a qualquer momento para ajudar a visualizar os dados do sensor durante a execução do seu projeto. Observe que o Painel pode ser ocultado e reaberto a qualquer momento, conforme mostrado neste vídeo. No videoclipe abaixo, o menu de hambúrguer no canto superior esquerdo da janela do Playground é selecionado para exibir o botão Painel abaixo dele. O botão Dashboard é então selecionado e o Dashboard é aberto. Este processo é repetido para fechar o Painel.
Perguntas
Selecione uma ligação abaixo para aceder ao questionário da aula.
Google Doc / .docx / .pdf