
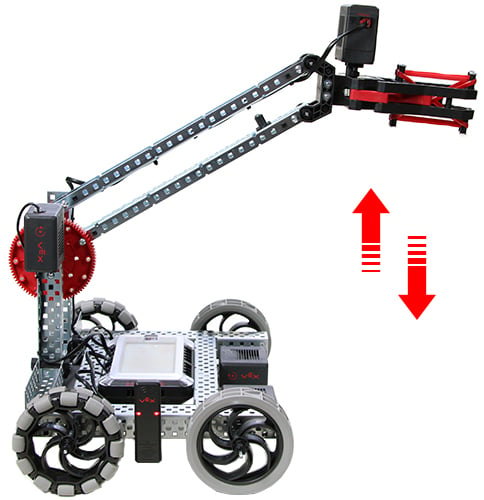
روبوت V5 Clawbot جاهز للوصول!
سيمنحك هذا الاستكشاف الأدوات اللازمة لبدء إنشاء بعض المشاريع الرائعة التي تستخدم ذراع V5 Clawbot.
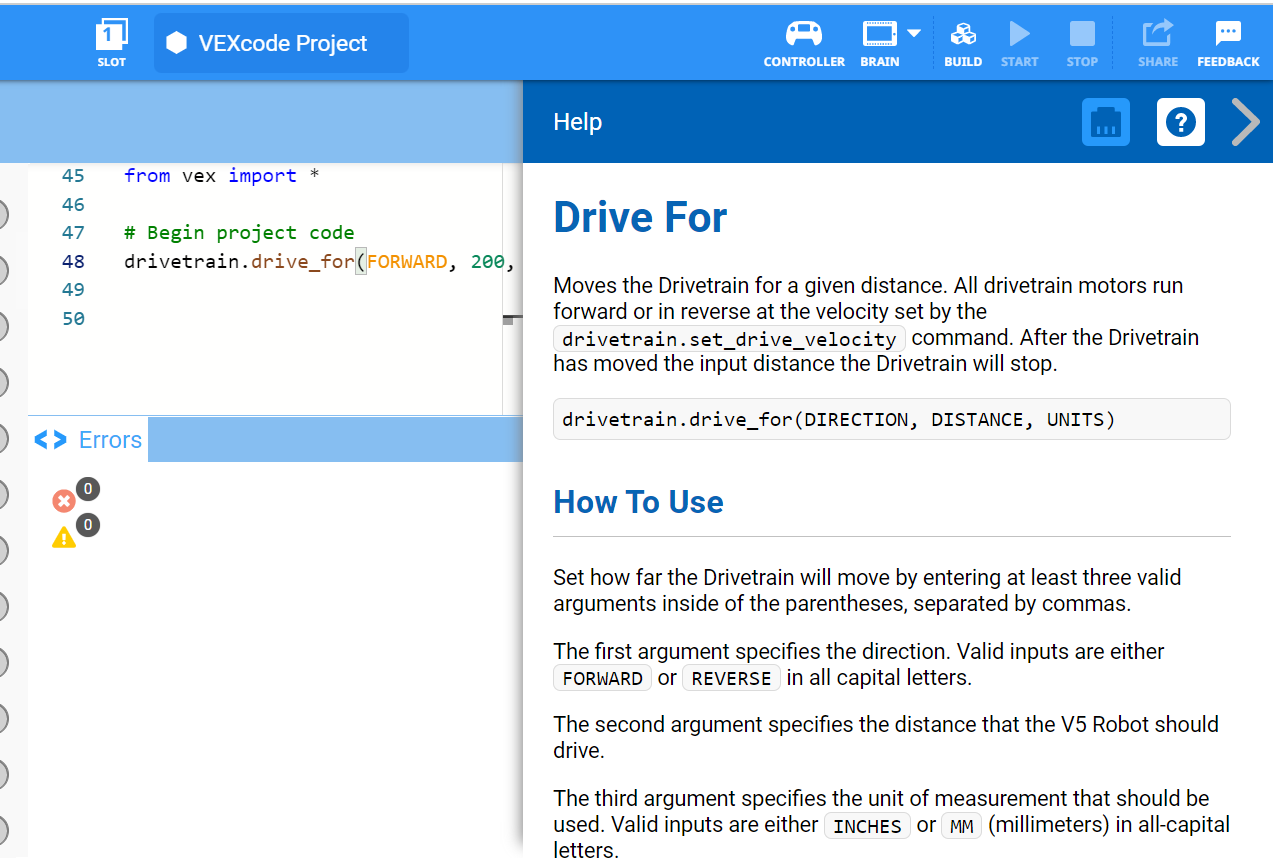
- تعليمات VEXcode V5 التي سيتم استخدامها في هذا الاستكشاف:
- ArmMotor.spinFor(إلى الأمام، 90 درجة)؛
- ArmMotor.setPosition(0، درجات)؛
- انتظر(2، ثانية)؛
-
لمعرفة المزيد من المعلومات حول التعليمات، حدد تعليمات ثم حدد رمز علامة الاستفهام بجوار الأمر لرؤية المزيد من المعلومات.
- تأكد من أن لديك الأجهزة المطلوبة ودفتر الهندسة الخاص بك وبرنامج VEXcode V5 الذي تم تنزيله وأنك جاهز.
| كمية | المواد المطلوبة |
|---|---|
| 1 |
مجموعة أدوات بدء تشغيل VEX V5 Classroom (مع البرامج الثابتة المحدثة) |
| 1 |
كود VEX الإصدار 5 |
| 1 |
دفتر الهندسة |
| 1 |
مشروع نموذجي لقالب Clawbot (نظام نقل الحركة ثنائي المحرك، بدون جيروسكوب) |
![]() نصائح للمعلم
نصائح للمعلم
قم بعمل نموذج لكل خطوة من خطوات استكشاف الأخطاء وإصلاحها للطلاب.
الخطوة 2: بدء مشروع جديد
قبل أن تبدأ مشروعك، حدد قالب المشروع الصحيح. يحتوي مشروع مثال قالب Clawbot (Drivetrain 2-motor، No Gyro) على تكوين محركات Clawbot. إذا لم يتم استخدام القالب، فلن يقوم الروبوت الخاص بك بتشغيل المشروع بشكل صحيح.

أكمل الخطوات التالية:
- افتح قائمة الملف.
- إختر مفتوح أمثلة.

- قم باختيار مشروع المثال Clawbot Template (Drivetrain 2-motor, No Gyro) وافتحه.
- نظرًا لأننا سنقوم بالبرمجة للتحكم في الذراع، قم بإعادة تسمية مشروعك ArmControl.
- احفظ مشروعك.
- تأكد من أن اسم المشروع ArmControl موجود الآن في النافذة الموجودة في منتصف شريط الأدوات.

![]() نصائح للمعلم
نصائح للمعلم
-
نظرًا لأن هذا نشاط تمهيدي في البرمجة، فيجب على المعلم أن يقوم بعمل نموذج للخطوات، ثم يطلب من الطلاب إكمال نفس الإجراءات. يجب على المعلم بعد ذلك مراقبة الطلاب للتأكد من أنهم يتبعون الخطوات بشكل صحيح.
-
تأكد من أن الطلاب قد اختاروا فتح الأمثلة من قائمة الملف.
-
تأكد من أن الطلاب قد اختاروا مشروع نموذج Clawbot Template (Drivetrain 2-motor, No Gyro).
يمكنك الإشارة للطلاب إلى وجود العديد من الاختيارات التي يمكنهم الاختيار من بينها في صفحة أمثلة . مع قيامهم ببناء واستخدام الروبوتات الأخرى، سيكون لديهم فرصة لاستخدام قوالب مختلفة.
-
يمكنك أن تطلب من الطلاب إضافة الأحرف الأولى من أسمائهم أو اسم مجموعتهم إلى اسم المشروع. سيساعدك هذا على التمييز بين المشاريع إذا طلبت من الطلاب تقديمها.
![]() صندوق أدوات المعلم
-
حفظ المشاريع
صندوق أدوات المعلم
-
حفظ المشاريع
-
أشر إلى أنه عندما فتحوا VEXcode V5 لأول مرة، تم تسمية النافذة باسم MyProject1. MyProject1 هو اسم المشروع الافتراضي عند فتح VEXcode V5 لأول مرة. بمجرد إعادة تسمية المشروع إلى Drive وحفظه، تم تحديث العرض لإظهار اسم المشروع الجديد. باستخدام هذه النافذة في شريط الأدوات، من السهل التأكد من أن الطلاب يستخدمون المشروع الصحيح.
-
أخبر الطلاب أنهم الآن مستعدون لبدء مشروعهم الأول. اشرح للطلاب أنه بمجرد اتباع بعض الخطوات البسيطة، سيتمكنون من إنشاء وتشغيل مشروع من شأنه رفع وخفض ذراع Clawbot.
-
ذكّر الطلاب بحفظ مشاريعهم أثناء العمل عليها. تشرح هذه المقالة من قاعدة بيانات المعرفة الخاصة بالروبوتات VEX ممارسات الحفظ في VEXcode V5.
![]() صندوق أدوات المعلم
-
توقف وناقش
صندوق أدوات المعلم
-
توقف وناقش
هذه نقطة جيدة للتوقف مؤقتًا وجعل مجموعات الطلاب تراجع الخطوات التي تم إكمالها للتو عند بدء مشروع جديد في VEXcode V5.
الخطوة 3: حرك الذراع لأعلى
سنبدأ الآن ببرمجة الذراع للرفع!
int main() {
// تهيئة تكوين الروبوت. لا تقم بإزالة!
vexcodeInit();
ArmMotor.setPosition(0، درجات);
}- اكتب تعليمة ArmMotor.setPosition(); كما هو موضح أعلاه في منطقة البرمجة لتعيين موضع البداية للذراع.
ArmMotor.setPosition(0، درجات)؛
ArmMotor.spinFor(إلى الأمام، 90، درجات)؛- أضف تعليمات ArmMotor.spinFor(); أسفل أمر ArmMotor.setPosition() كما هو موضح أعلاه لتحريك الذراع لأعلى. تأكد من أن Spin For مسنن ليتطابق مع أمر Set Position ، وأن جميع الأوامر موجودة بين الأقواس المتعرجة.

- انقر على أيقونة الفتحة. يمكنك تنزيل مشروعك على إحدى الفتحات المتاحة في Robot Brain. انقر فوق الفتحة 1.
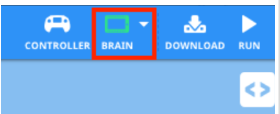
- قم بتوصيل الروبوت بالكمبيوتر أو الجهاز اللوحي الخاص بك. يتحول لون أيقونة الدماغ في شريط الأدوات إلى اللون الأخضر بعد إجراء اتصال ناجح.

- انقر فوق الزر تنزيل على شريط الأدوات لتنزيل مشروع Drive إلى Robot Brain.
![]() صندوق أدوات المعلم
-
مساعدة في النص
صندوق أدوات المعلم
-
مساعدة في النص
-
إذا كان الطلاب يستخدمون جهاز كمبيوتر، اطلب منهم الآن فصل كابل USB عن دماغ الروبوت. قد يؤدي توصيل الروبوت بالكمبيوتر أثناء تشغيل مشروع ما إلى قيام الروبوت بسحب كابل الاتصال.

- تأكد من أن مشروع ArmControl تم تنزيله إلى الدماغ في الفتحة التي اخترتها.
![]() صندوق أدوات المعلم
-
خيار النمذجة أولاً
صندوق أدوات المعلم
-
خيار النمذجة أولاً
نموذج تنفيذ المشروع أمام الفصل قبل أن يحاول جميع الطلاب تنفيذه مرة واحدة. اجمع الطلاب في منطقة واحدة واترك مساحة كافية لـ Clawbot لتحريك ذراعه. أظهر كيفية إنهاء المشروع وإرجاع ذراع Clawbot إلى وضع الراحة.
أخبر الطلاب أنه حان دورهم الآن لتشغيل مشاريعهم. تأكد من أن لديهم مساحة كافية لرفع ذراع Clawbot بأمان.
- قمالمشروع على عن طريق التأكد من تحديد المشروع ثم اضغط على زر التشغيل. أهنئك على إنشاء أول مشروع Claw Arm الخاص بك!
الخطوة 4: جرب هذا: برمجة الذراع لأسفل
الآن بعد أن قمت ببرمجة الذراع للتحرك لأعلى، فسوف تقوم الآن ببرمجة الذراع للخفض أو التحرك لأسفل.

![]()
- أضف تعليمة ArmMotor.spinFor(); الثانية إلى مشروع ArmControl الخاص بك حتى يرتفع الذراع إلى 90 درجة، وينتظر لمدة ثانيتين، ثم يعود للأسفل.
- : سوف تحتاج إلى تغيير الاتجاه داخل التعليمات.
- لاحظ أن الذراع يحتفظ بموقعه أثناء تشغيل الأمر wait . يستمد المحرك الطاقة من البطارية ليحمل الذراع في مواجهة قوة الجاذبية. يرجع ذلك إلى أن الإعداد الافتراضي لإيقاف المحرك هو الإعداد الاستمرار . هناك إعدادان آخران للتوقف - الفرامل و الساحل. سوف تتعلم عن ذلك في مختبر آخر.
![]() صندوق أدوات المعلم
-
الحل
صندوق أدوات المعلم
-
الحل
الحل للتحدي موجود أدناه . لخفض الذراع، احتاج الطلاب إلى تغيير معلمة "الأمام" إلى "الخلف" في تعليمة ArmMotor.spinFor(); التي تمت إضافتها.
// ابدأ كود المشروع
int main() {
// تهيئة تكوين الروبوت. لا تقم بإزالة!
vexcodeInit();
ArmMotor.setPosition(0, degrees);
ArmMotor.spinFor(forward, 90, degrees);
wait(2,seconds);
ArmMotor.spinFor(reverse, 90, degrees);
}الخطوة 5: أكمل تحدي مراقب حركة الطيران
![]() في تحدي مراقب حركة الطيران، يجب على Clawbot تحريك ذراعه لأعلى ولأسفل مرة واحدة لمدة 90 درجة، والانتظار لمدة 3 ثوانٍ، وتحريك الذراع لأعلى ولأسفل مرتين لمدة 45 درجة، والانتظار لمدة 5 ثوانٍ، ثم تحريك الذراع لأعلى ولأسفل ثلاث مرات لمدة 90 درجة.
في تحدي مراقب حركة الطيران، يجب على Clawbot تحريك ذراعه لأعلى ولأسفل مرة واحدة لمدة 90 درجة، والانتظار لمدة 3 ثوانٍ، وتحريك الذراع لأعلى ولأسفل مرتين لمدة 45 درجة، والانتظار لمدة 5 ثوانٍ، ثم تحريك الذراع لأعلى ولأسفل ثلاث مرات لمدة 90 درجة.
فيما يلي قائمة بسلوكيات Clawbot:
- حرك الذراع لأعلى ثم لأسفل بزاوية 90 درجة.
- انتظر 3 ثواني.
- حرك الذراع لأعلى ثم لأسفل بزاوية 45 درجة.
- حرك الذراع لأعلى ثم لأسفل بزاوية 45 درجة.
- انتظر 5 ثواني.
- حرك الذراع لأعلى ثم لأسفل بزاوية 90 درجة.
- حرك الذراع لأعلى ثم لأسفل بزاوية 90 درجة.
- حرك الذراع لأعلى ثم لأسفل بزاوية 90 درجة.
![]() صندوق أدوات المعلم
-
الحل
صندوق أدوات المعلم
-
الحل
معظم التعليمات الموجودة ضمن هذا التحدي هي ArmMotor.spinFor();. بعد إضافة تعليمة لتحريك الذراع لأعلى، وتعليمة لتحريك الذراع لأسفل، يمكنك تحديد التعليمتين، والنقر بزر الماوس الأيمن، ثم اختيار نسخهما ولصقهما عدة مرات حسب الحاجة. ومن ثم يمكن تغيير المعلمات لتلبية التحدي والانتظار ويمكن إضافة التعليمات بينهما.

- حل تحدي مراقب حركة الطيران:
// ابدأ كود المشروع
int main() {
// تهيئة تكوين الروبوت. لا تقم بإزالة!
vexcodeInit();
ArmMotor.setPosition(0, degrees);
ArmMotor.spinFor(forward, 90, degrees);
ArmMotor.spinFor(reverse, 90, degrees);
wait(3, seconds)
ArmMotor.spinFor(forward, 45, degrees);
ArmMotor.spinFor(reverse, 45, degrees);
ArmMotor.spinFor(forward, 45, degrees);
ArmMotor.spinFor(reverse, 45, degrees);
wait(5, seconds)
ArmMotor.spinFor(forward, 90, degrees);
ArmMotor.spinFor(reverse, 90, degrees);
ArmMotor.spinFor(forward, 90, degrees);
ArmMotor.spinFor(reverse, 90, degrees);
ArmMotor.spinFor(إلى الأمام، 90، درجة)؛
ArmMotor.spinFor(إلى الخلف، 90، درجة)؛
}- معايير البرمجة (Google Doc / .docx / .pdf)