
![]() Toolbox per l'insegnante
-
Schema dell'attività
Toolbox per l'insegnante
-
Schema dell'attività
-
Questa esplorazione introdurrà gli studenti alla programmazione di base del motore del braccio del V5 Clawbot.
-
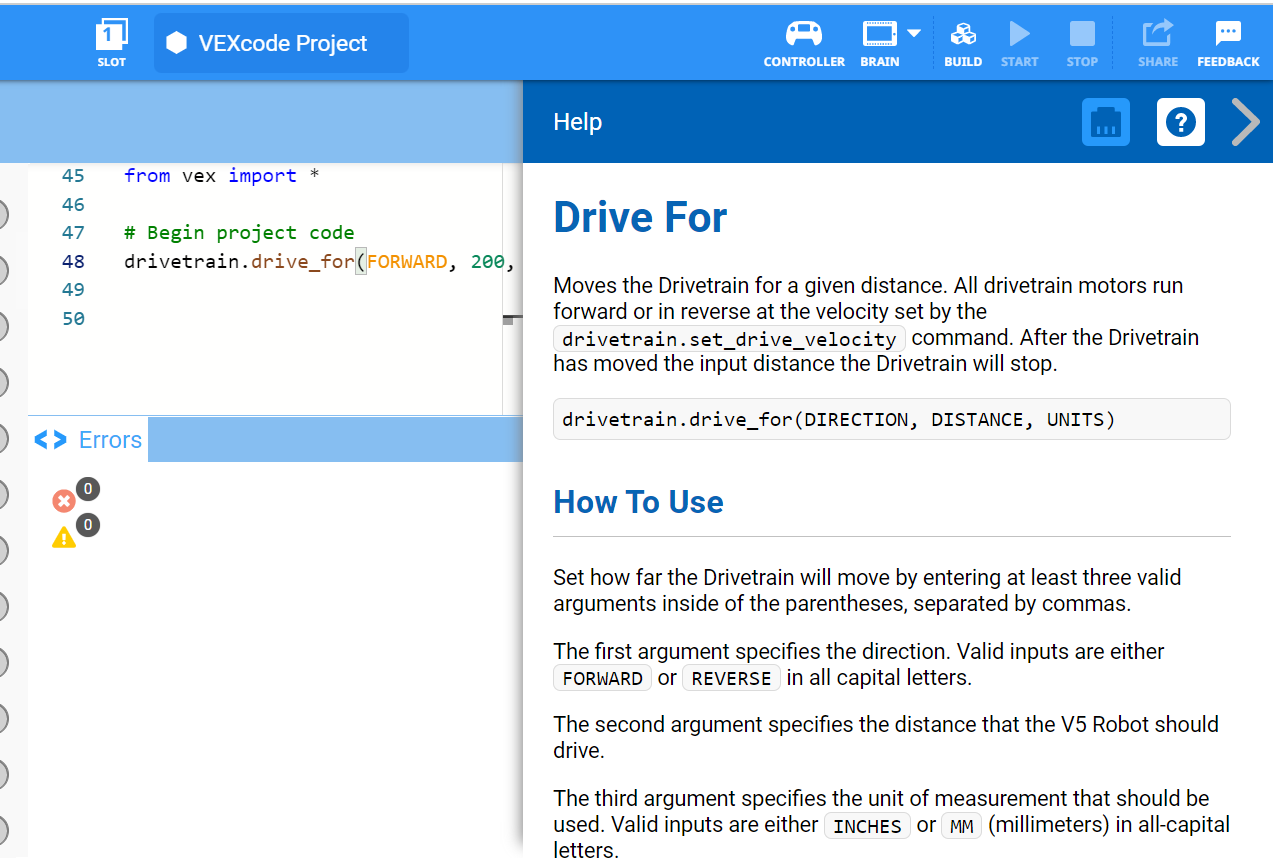
Imparare a programmare il motore del braccio consente agli studenti di controllare correttamente i movimenti del braccio del V5 Clawbot. Per ulteriori informazioni sulle istruzioni utilizzate in un programma di testo, visitare le informazioni della guida
Il V5 Clawbot è pronto a partire!
Questa esplorazione ti fornirà gli strumenti per iniziare a creare alcuni fantastici progetti utilizzando il braccio del V5 Clawbot.
- Istruzioni VEXcode V5 che verranno utilizzate in questa esplorazione:
- ArmMotor.spinFor(avanti, 90,gradi);
- ArmMotor.setPosition(0, gradi);
- attendi(2, secondi);
-
Per ulteriori informazioni sull'istruzione, selezionare Guida , quindi selezionare l'icona del punto interrogativo accanto a un comando per visualizzare ulteriori informazioni.
- Assicurati di avere l'hardware necessario, il tuo notebook di progettazione e VEXcode V5 scaricato e pronto.
| Quantità | Materiali necessari |
|---|---|
| 1 |
Kit di avvio per la classe VEX V5 (con firmware aggiornato) |
| 1 |
Codice VEX V5 |
| 1 |
Quaderno di ingegneria |
| 1 |
Progetto di esempio del modello Clawbot (trasmissione a 2 motori, senza giroscopio) |
Fase 1: Preparazione all'esplorazione
Prima di iniziare l'attività, hai pronto ciascuno di questi elementi? Selezionare ciascuna delle seguenti opzioni:
-
I motori sono collegati alle porte corrette?
-
I cavi intelligenti sono completamente inseriti in tutti i motori?
-
Il Cervello è acceso?
![]() Suggerimenti per gli insegnanti
Suggerimenti per gli insegnanti
Simulare per gli studenti ciascuna delle fasi di risoluzione dei problemi.
Passaggio 2: Avvia un nuovo progetto
Prima di iniziare il progetto, seleziona il modello di progetto corretto. Il progetto di esempio Clawbot Template (Trasmissione a 2 motori, senza giroscopio) contiene la configurazione dei motori del Clawbot. Se il modello non viene utilizzato, il robot non eseguirà correttamente il progetto.

Completare i seguenti passaggi:
- Aprire il menu File.
- Seleziona Apri Esempi.

- Seleziona e apri il progetto di esempio Clawbot Template (Trasmissione a 2 motori, senza giroscopio).
- Poiché programmeremo per controllare il braccio, rinomina il tuo progetto ArmControl.
- Salva il tuo progetto.
- Verificare che il nome del progetto ArmControl sia ora visualizzato nella finestra al centro della barra degli strumenti.

![]() Suggerimenti per gli insegnanti
Suggerimenti per gli insegnanti
-
Poiché si tratta di un'attività introduttiva alla programmazione, l'insegnante dovrebbe modellare i passaggi e poi chiedere agli studenti di completare le stesse azioni. L'insegnante deve quindi monitorare gli studenti per assicurarsi che seguano correttamente i passaggi.
-
Assicuratevi che gli studenti abbiano selezionato Apri esempi dal menu File.
-
Assicuratevi che gli studenti abbiano selezionato il progetto di esempio Clawbot Template (trasmissione a 2 motori, senza giroscopio).
Puoi far notare agli studenti che ci sono diverse selezioni tra cui scegliere nella pagina Esempi . Man mano che costruiranno e utilizzeranno altri robot, avranno la possibilità di utilizzare modelli diversi.
-
Puoi chiedere agli studenti di aggiungere le loro iniziali o il nome del loro gruppo al nome del progetto. Ciò contribuirà a differenziare i progetti se chiederai agli studenti di presentarli.
![]() Toolbox per insegnanti
-
Salvataggio progetti
Toolbox per insegnanti
-
Salvataggio progetti
-
Fate notare che quando hanno aperto per la prima volta VEXcode V5, la finestra era etichettata MyProject1. MyProject1 è il nome predefinito del progetto quando VEXcode V5 viene aperto per la prima volta. Dopo aver rinominato il progetto Drive e averlo salvato, la visualizzazione è stata aggiornata per mostrare il nuovo nome del progetto. Utilizzando questa finestra nella barra degli strumenti, è facile verificare che gli studenti stiano utilizzando il progetto corretto.
-
Dì agli studenti che ora sono pronti per iniziare il loro primo progetto. Spiega agli studenti che seguendo pochi semplici passaggi saranno in grado di creare ed eseguire un progetto che solleverà e abbasserà il braccio del Clawbot.
-
Ricordare agli studenti di salvare i loro progetti mentre lavorano. Questo articolo della VEX Robotics Knowledge Base spiega le procedure di salvataggio in VEXcode V5.
![]() Toolbox per l'insegnante
-
Fermati e discuti
Toolbox per l'insegnante
-
Fermati e discuti
Questo è un buon momento per fermarsi e far rivedere ai gruppi di studenti i passaggi appena completati per avviare un nuovo progetto in VEXcode V5.
Passaggio 3: Sposta il braccio verso l'alto
Ora inizieremo programmando il sollevamento del braccio!
int main() {
// Inizializzazione della configurazione del robot. NON RIMUOVERE!
vexcodeInit();
ArmMotor.setPosition(0, gradi);
}- Scrivere l'istruzione ArmMotor.setPosition(); come mostrato sopra nell'area di programmazione per impostare la posizione di partenza del braccio.
ArmMotor.setPosition(0, gradi);
ArmMotor.spinFor(avanti, 90, gradi);- Aggiungere l'istruzione ArmMotor.spinFor(); sotto il comando ArmMotor.setPosition() come mostrato sopra per muovere il braccio verso l'alto. Assicuratevi che il comando Spin For sia rientrato in modo da corrispondere al comando Set Position e che tutti i comandi siano racchiusi tra parentesi graffe.

- Fare clic sull'icona Slot. Puoi scaricare il tuo progetto in uno degli slot disponibili nel Robot Brain. Fare clic sullo Slot 1.
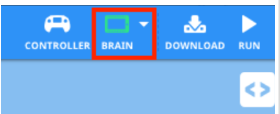
- Collega il robot al tuo computer o tablet. L'icona Cervello nella barra degli strumenti diventa verde dopo che è stata stabilita una connessione riuscita.

- Fare clic sul pulsante Scarica sulla barra degli strumenti per scaricare il progetto Drive nel Robot Brain.
![]() Toolbox per l'insegnante
-
Aiuto con il testo
Toolbox per l'insegnante
-
Aiuto con il testo
-
Se gli studenti utilizzano un computer, chiedete loro di scollegare il cavo USB dal Robot Brain. Se il robot è collegato a un computer durante l'esecuzione di un progetto, potrebbe tirare il cavo di collegamento.

- Controlla che il progetto ArmControl sia stato scaricato nel cervello nello slot scelto.
![]() Toolbox per l'insegnante
-
Opzione per modellare prima
Toolbox per l'insegnante
-
Opzione per modellare prima
Simulare l'esecuzione del progetto davanti alla classe prima di far provare tutto a tutti gli studenti contemporaneamente. Raduna gli studenti in un'area e lascia abbastanza spazio per consentire al Clawbot di muovere il braccio. Mostra come terminare il progetto e come far abbassare il braccio del Clawbot nella posizione di riposo.
Dì agli studenti che ora è il loro turno di eseguire i loro progetti. Assicuratevi che ci sia spazio a sufficienza per sollevare il braccio del Clawbot in tutta sicurezza.
- Esegui il progetto sul Clawbot assicurandoti che il progetto sia selezionato, quindi premi il pulsante Esegui. Congratulazioni per aver creato il tuo primo progetto Claw Arm!
Passaggio 4: Prova questo: programma il braccio verso il basso
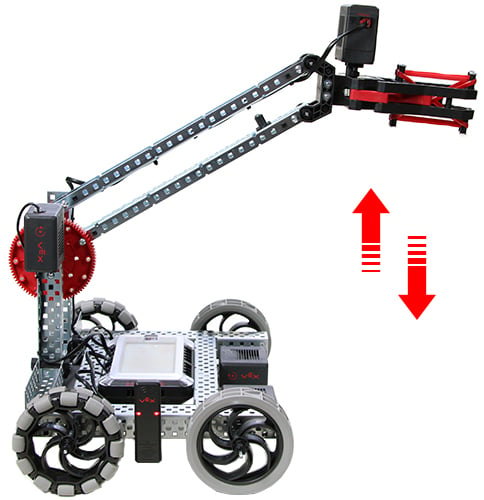
Ora che hai programmato il braccio per il movimento verso l'alto, puoi programmarlo per l'abbassamento o il movimento verso il basso.

![]()
- Aggiungi una seconda istruzione ArmMotor.spinFor(); al tuo progetto ArmControl in modo che il braccio si sollevi di 90 gradi, attenda 2 secondi e poi torni ad abbassarsi.
- Suggerimento: Sarà necessario cambiare la direzione all'interno delle istruzioni.
- Si noti che il braccio mantiene la sua posizione mentre è in esecuzione il comando wait . Il motore trae energia dalla batteria per sostenere il braccio contrastando la forza di gravità. Questo perché l'impostazione predefinita per l'arresto del motore è hold . Sono disponibili altre due impostazioni per l'arresto: freno e inerzia. Ne parleremo in un altro laboratorio.
![]() Toolbox per l'insegnante
-
Soluzione
Toolbox per l'insegnante
-
Soluzione
Di seguito la soluzione alla sfida. Per abbassare il braccio, gli studenti dovevano modificare il parametro “avanti” in “indietro” nell’istruzione ArmMotor.spinFor(); che era stata aggiunta.
// Inizio codice progetto
int main() {
// Inizializzazione configurazione robot. NON RIMUOVERE!
vexcodeInit();
ArmMotor.setPosition(0, gradi);
ArmMotor.spinFor(avanti, 90, gradi);
wait(2,secondi);
ArmMotor.spinFor(indietro, 90, gradi);
}Fase 5: Completa la sfida del controllore del traffico di volo
![]() Nella sfida del controllore del traffico aereo, il Clawbot deve muovere il braccio su e giù una volta per 90 gradi, attendere 3 secondi, muovere il braccio su e giù due volte per 45 gradi, attendere 5 secondi e poi muovere il braccio su e giù tre volte per 90 gradi.
Nella sfida del controllore del traffico aereo, il Clawbot deve muovere il braccio su e giù una volta per 90 gradi, attendere 3 secondi, muovere il braccio su e giù due volte per 45 gradi, attendere 5 secondi e poi muovere il braccio su e giù tre volte per 90 gradi.
Ecco un elenco dei comportamenti del Clawbot:
- Muovi il braccio verso l'alto e poi verso il basso per 90 gradi.
- Attendi 3 secondi.
- Muovi il braccio verso l'alto e poi verso il basso di 45 gradi.
- Muovi il braccio verso l'alto e poi verso il basso di 45 gradi.
- Attendi 5 secondi.
- Muovi il braccio verso l'alto e poi verso il basso per 90 gradi.
- Muovi il braccio verso l'alto e poi verso il basso per 90 gradi.
- Muovi il braccio verso l'alto e poi verso il basso per 90 gradi.
![]() Toolbox per l'insegnante
-
Soluzione
Toolbox per l'insegnante
-
Soluzione
La maggior parte delle istruzioni contenute in questa sfida sono ArmMotor.spinFor();. Dopo aver aggiunto un'istruzione per muovere il braccio verso l'alto e una per muoverlo verso il basso, puoi evidenziare le due istruzioni, fare clic con il pulsante destro del mouse e quindi scegliere di copiarle e incollarle tutte le volte che vuoi. Quindi i parametri possono essere modificati per soddisfare la sfida e possono essere aggiunte istruzioni wait();

- Soluzione della sfida del controllore del traffico di volo:
// Inizio codice progetto
int main() {
// Inizializzazione configurazione robot. NON RIMUOVERE!
vexcodeInit();
ArmMotor.setPosition(0, gradi);
ArmMotor.spinFor(avanti, 90, gradi);
ArmMotor.spinFor(indietro, 90, gradi);
wait(3, secondi)
ArmMotor.spinFor(avanti, 45, gradi);
ArmMotor.spinFor(indietro, 45, gradi);
ArmMotor.spinFor(avanti, 45, gradi);
ArmMotor.spinFor(indietro, 45, gradi);
wait(5, secondi)
ArmMotor.spinFor(avanti, 90, gradi);
ArmMotor.spinFor(indietro, 90, gradi);
ArmMotor.spinFor(avanti, 90, gradi);
ArmMotor.spinFor(indietro, 90, gradi);
ArmMotor.spinFor(avanti, 90, gradi);
ArmMotor.spinFor(indietro, 90, gradi);
}- Rubrica di programmazione (Google Doc / .docx / .pdf)