
![]() Esquema de actividades
la caja de herramientas para docentes
Esquema de actividades
la caja de herramientas para docentes
-
Esta exploración presentará a los estudiantes la programación básica del motor del brazo del V5 Clawbot.
-
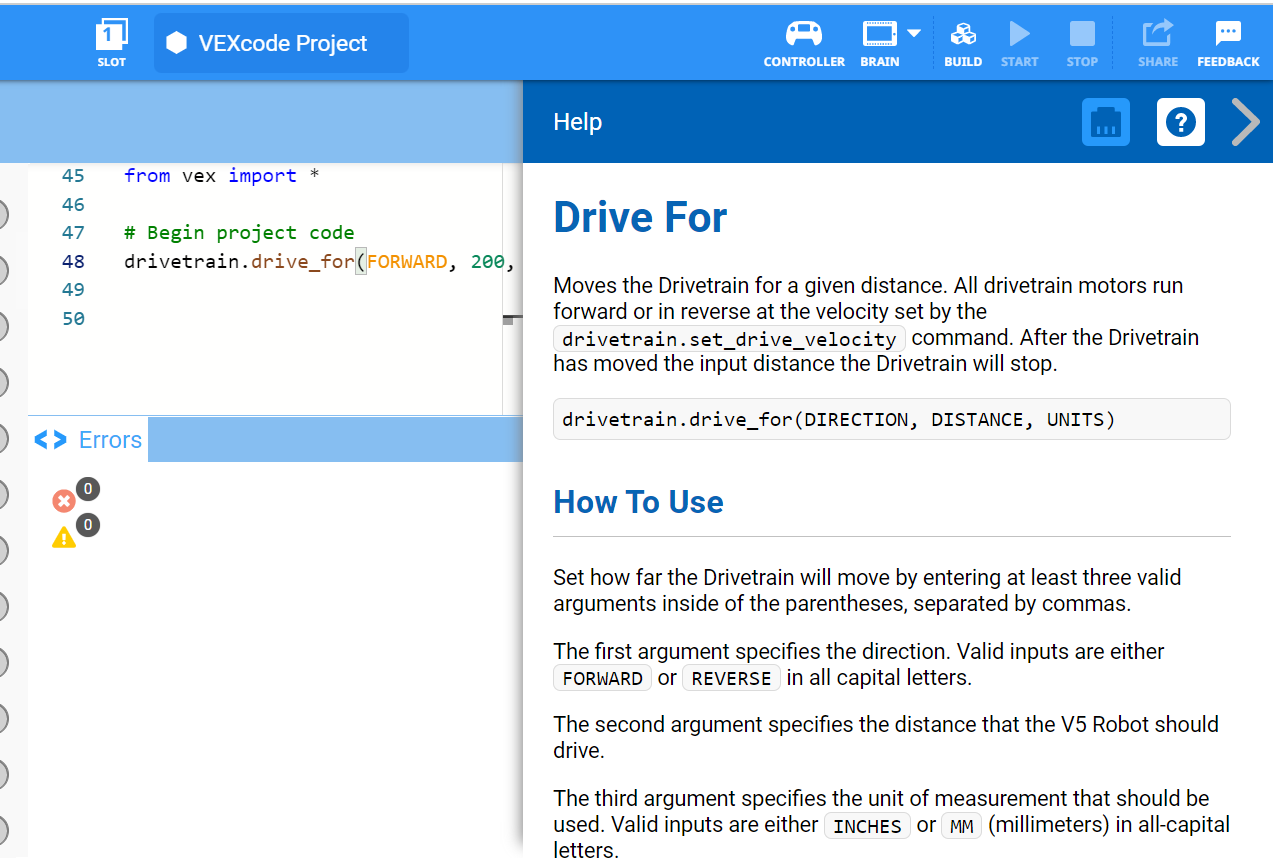
Aprender a programar el motor del brazo permite a los estudiantes controlar adecuadamente los movimientos del brazo del V5 Clawbot. Para obtener más información sobre las instrucciones utilizadas en un programa de texto, visite la información de ayuda
¡El V5 Clawbot está listo para llegar!
Esta exploración te brindará las herramientas para poder comenzar a crear algunos proyectos geniales que utilizan el brazo del V5 Clawbot.
- Instrucciones VEXcode V5 que se utilizarán en esta exploración:
- ArmMotor.spinFor(adelante, 90,grados);
- ArmMotor.setPosition(0, grados);
- esperar(2, segundos);
-
Para obtener más información sobre la instrucción, seleccione Ayuda y luego seleccione el ícono del signo de interrogación junto a un comando para ver más información.
- Asegúrate de tener el hardware necesario, tu cuaderno de ingeniería y VEXcode V5 descargado y listo.
| Cantidad | Materiales necesarios |
|---|---|
| 1 |
Kit de inicio para aulas VEX V5 (con firmware actualizado) |
| 1 |
Código VEX V5 |
| 1 |
Cuaderno de ingeniería |
| 1 |
Proyecto de ejemplo de plantilla Clawbot (transmisión de 2 motores, sin giroscopio) |
Paso 1: Preparación para la exploración
Antes de comenzar la actividad, ¿tienes cada uno de estos elementos listos? Marque cada uno de los siguientes:
-
¿Están los motores conectados a los puertos correctos?
-
¿Están los cables inteligentes completamente insertados en todos los motores?
-
¿El cerebro está encendido?
![]() Consejos para profesores
Consejos para profesores
Modele cada uno de los pasos de solución de problemas para los estudiantes.
Paso 2: Iniciar un nuevo proyecto
Antes de comenzar su proyecto, seleccione la plantilla de proyecto correcta. El proyecto de ejemplo de plantilla Clawbot (transmisión de 2 motores, sin giroscopio) contiene la configuración de los motores de Clawbot. Si no se utiliza la plantilla, su robot no ejecutará el proyecto correctamente.

Complete los siguientes pasos:
- Abra el menú Archivo.
- Seleccionar Abrir Ejemplos.

- Seleccione y abra el proyecto de ejemplo Plantilla Clawbot (Transmisión de 2 motores, sin giroscopio).
- Dado que vamos a programar para controlar el brazo, cambie el nombre de su proyecto ArmControl.
- Guarda tu proyecto.
- Verifique que el nombre del proyecto ArmControl esté ahora en la ventana en el centro de la barra de herramientas.
![]() Consejos para profesores
Consejos para profesores
-
Dado que esta es una actividad inicial con programación, el profesor debe modelar los pasos y luego pedir a los estudiantes que completen las mismas acciones. Luego, el profesor debe supervisar a los estudiantes para asegurarse de que estén siguiendo los pasos correctamente.
-
Asegúrese de que los estudiantes hayan seleccionado Abrir ejemplos en el menú Archivo.
-
Asegúrese de que los estudiantes hayan seleccionado el proyecto de ejemplo Plantilla Clawbot (Transmisión de 2 motores, sin giroscopio).
Puede señalar a los estudiantes que hay varias selecciones para elegir en la página Ejemplos . A medida que construyan y utilicen otros robots, tendrán la oportunidad de utilizar diferentes plantillas.
-
Puede pedir a los estudiantes que agreguen sus iniciales o el nombre de su grupo al nombre del proyecto. Esto ayudará a diferenciar los proyectos si pide a los estudiantes que los presenten.
![]() Caja de herramientas para docentes
-
Guardar proyectos
Caja de herramientas para docentes
-
Guardar proyectos
-
Señale que cuando abrieron por primera vez VEXcode V5, la ventana estaba etiquetada como MyProject1. MyProject1 es el nombre del proyecto predeterminado cuando se abre VEXcode V5 por primera vez. Una vez que el proyecto fue renombrado Drive y guardado, la pantalla se actualizó para mostrar el nuevo nombre del proyecto. Usando esta ventana en la barra de herramientas, es fácil verificar que los estudiantes están usando el proyecto correcto.
-
Dile a los estudiantes que ahora están listos para comenzar su primer proyecto. Explique a los estudiantes que con solo seguir unos sencillos pasos, podrán crear y ejecutar un proyecto que elevará y bajará el brazo del Clawbot.
-
Recuerde a los estudiantes que guarden sus proyectos mientras trabajan. Este artículo de la Base de conocimiento de VEX Robotics explica las prácticas de guardado en VEXcode V5.
![]() Caja de herramientas para docentes
-
Detenerse y debatir
Caja de herramientas para docentes
-
Detenerse y debatir
Este es un buen punto para hacer una pausa y que los grupos de estudiantes revisen los pasos que se acaban de completar al iniciar un nuevo proyecto en VEXcode V5.
Paso 3: Mueva el brazo hacia arriba
¡Ahora vamos a comenzar programando el brazo para que se levante!
int main() {
// Inicializando la configuración del robot. ¡NO QUITAR!
vexcodeInit();
ArmMotor.setPosition(0, grados);
}- Escriba la instrucción ArmMotor.setPosition(); como se muestra arriba en el área de programación para establecer la posición inicial del brazo.
ArmMotor.setPosition(0, grados);
ArmMotor.spinFor(adelante, 90, grados);- Agregue la instrucción ArmMotor.spinFor(); debajo del comando ArmMotor.setPosition() como se muestra arriba para mover el brazo hacia arriba. Asegúrese de que el comando Spin For esté sangrado para que coincida con el comando Set Position y que todos los comandos estén dentro de las llaves.

- Haga clic en el icono de la ranura. Puedes descargar tu proyecto a uno de los espacios disponibles en Robot Brain. Haga clic en la ranura 1.
- Conecta el robot a tu ordenador o tableta. El icono del cerebro en la barra de herramientas se vuelve verde después de que se haya realizado una conexión exitosa.

- Haga clic en el botón Descargar en la barra de herramientas para descargar el proyecto Drive al Robot Brain.
![]() Caja de herramientas para profesores
-
Ayuda con el texto
Caja de herramientas para profesores
-
Ayuda con el texto
-
Si los estudiantes están usando una computadora, pídales ahora que desconecten el cable USB del Cerebro Robot. Tener el robot conectado a una computadora mientras se ejecuta un proyecto podría provocar que el robot tire del cable de conexión.

- Verifique que el proyecto ArmControl se haya descargado en el cerebro en la ranura que eligió.
![]() Caja de herramientas para docentes
-
Opción para modelar primero
Caja de herramientas para docentes
-
Opción para modelar primero
Modele la ejecución del proyecto frente a la clase antes de que todos los estudiantes lo intenten a la vez. Reúna a los estudiantes en un área y deje suficiente espacio para que Clawbot mueva su brazo. Demuestre cómo finalizar el proyecto y hacer que el brazo del Clawbot vuelva a su posición de reposo.
Dígales a los estudiantes que ahora es su turno de ejecutar sus proyectos. Asegúrese de que tengan el espacio adecuado para que el brazo del Clawbot se levante de forma segura.
- Ejecute el proyecto en Clawbot asegurándose de que el proyecto esté seleccionado y luego presione el botón Ejecutar. ¡Felicitaciones por crear tu primer proyecto de brazo de garra!
Paso 4: Pruebe esto: Programe el brazo hacia abajo
Ahora que ha programado el brazo para moverse hacia arriba, ahora programará el brazo para bajar o moverse hacia abajo.

![]()
- Agregue una segunda instrucción ArmMotor.spinFor(); a su proyecto ArmControl para que el brazo se eleve a 90 grados, espere 2 segundos y luego vuelva a bajar.
- Sugerencia: Necesitará cambiar la dirección dentro de las instrucciones.
- Observe que el brazo mantiene su posición mientras se ejecuta el comando wait . El motor obtiene energía de la batería para mantener el brazo en alto contra la fuerza de la gravedad. Esto se debe a que la configuración predeterminada para detener el motor es la configuración mantener . Hay otras dos configuraciones para detenerse: freno y marcha por inercia. Aprenderás sobre esto en otro laboratorio.
![]() Caja de herramientas para docentes
-
Solución
Caja de herramientas para docentes
-
Solución
La solución al desafío está a continuación. Para bajar el brazo, los estudiantes necesitaban cambiar el parámetro “adelante” a “atrás” en la instrucción ArmMotor.spinFor(); que se agregó.
// Iniciar código de proyecto
int main() {
// Inicializando configuración del robot. ¡NO QUITAR!
vexcodeInit();
ArmMotor.setPosition(0, grados);
ArmMotor.spinFor(adelante, 90, grados);
esperar(2,segundos);
ArmMotor.spinFor(atrás, 90, grados);
}Paso 5: Completa el desafío del controlador de tráfico aéreo

![]() En el desafío del controlador de tráfico aéreo, Clawbot debe mover su brazo hacia arriba y hacia abajo una vez durante 90 grados, esperar 3 segundos, mover el brazo hacia arriba y hacia abajo dos veces durante 45 grados, esperar 5 segundos y luego mover el brazo hacia arriba y hacia abajo tres veces durante 90 grados.
En el desafío del controlador de tráfico aéreo, Clawbot debe mover su brazo hacia arriba y hacia abajo una vez durante 90 grados, esperar 3 segundos, mover el brazo hacia arriba y hacia abajo dos veces durante 45 grados, esperar 5 segundos y luego mover el brazo hacia arriba y hacia abajo tres veces durante 90 grados.
Aquí hay una lista de los comportamientos de Clawbot:
- Mueva el brazo hacia arriba y luego hacia abajo 90 grados.
- Espere 3 segundos.
- Mueva el brazo hacia arriba y luego hacia abajo 45 grados.
- Mueva el brazo hacia arriba y luego hacia abajo 45 grados.
- Espere 5 segundos.
- Mueva el brazo hacia arriba y luego hacia abajo 90 grados.
- Mueva el brazo hacia arriba y luego hacia abajo 90 grados.
- Mueva el brazo hacia arriba y luego hacia abajo 90 grados.
![]() Caja de herramientas para docentes
-
Solución
Caja de herramientas para docentes
-
Solución
La mayoría de las instrucciones dentro de este desafío son ArmMotor.spinFor();. Después de agregar una instrucción para mover el brazo hacia arriba y otra para moverlo hacia abajo, puede resaltar las dos instrucciones, hacer clic derecho y luego elegir copiarlas y pegarlas tantas veces como sea necesario. Luego se pueden cambiar los parámetros para cumplir con el desafío y esperar(); se pueden agregar instrucciones entre ellos.

- Solución del desafío del controlador de tráfico aéreo:
// Iniciar código de proyecto
int main() {
// Inicializando configuración del robot. ¡NO QUITAR!
vexcodeInit();
ArmMotor.setPosition(0, grados);
ArmMotor.spinFor(adelante, 90, grados);
ArmMotor.spinFor(atrás, 90, grados);
esperar(3, segundos)
ArmMotor.spinFor(adelante, 45, grados);
ArmMotor.spinFor(atrás, 45, grados);
ArmMotor.spinFor(adelante, 45, grados);
ArmMotor.spinFor(atrás, 45, grados);
esperar(5, segundos)
ArmMotor.spinFor(adelante, 90, grados);
ArmMotor.spinFor(atrás, 90, grados);
ArmMotor.spinFor(adelante, 90, grados);
ArmMotor.spinFor(atrás, 90, grados);
ArmMotor.spinFor(adelante, 90, grados);
ArmMotor.spinFor(atrás, 90, grados);
}- Rúbrica de Programación (Google Doc / .docx / .pdf)