
اتصال المنافسة: نقطة تحول - قائمة على الكتل
قدرات الروبوت
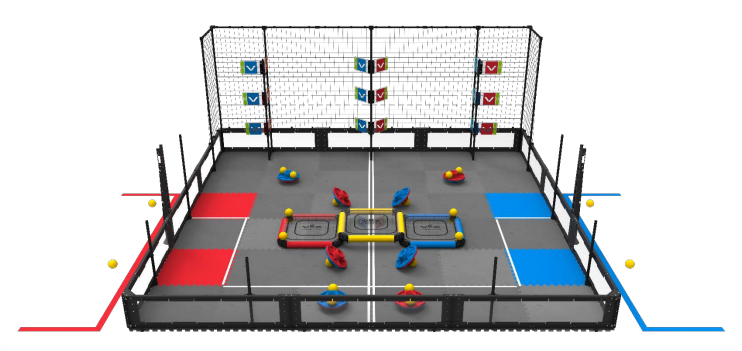
تطلبت لعبة "نقطة التحول" لمسابقة فيكس للروبوتات 2018 - 2019 من اللاعبين تبديل الأعلام بين عناصر اللعبة الأخرى. كان هناك ما مجموعه تسعة أعلام: ثلاثة أعلام سفلية يمكن تبديلها بواسطة الروبوت، والأعلام الستة العالية التي لا يمكن تبديلها إلا عن طريق ضربها بقطع لعبة كرة المنافسة. احتاجت فرق المنافسة إلى التوصل إلى طريقة لضرب الأعلام العليا باستخدام قاذفة الكرة. إذا كنت تستطيع أن تتخيل، فإن برمجة الروبوت لضرب الأعلام باستخدام قطع لعبة الكرة عن طريق القياس قد لا تكون دقيقة دائمًا. إذا اتخذ الروبوت منعطفًا خاطئًا واحدًا خلال الفترة المستقلة، فهناك احتمال ألا يتم ضرب أي من الأعلام لأن الحسابات ستكون متوقفة. وبالمثل، بالنسبة لتحدي مهارات القيادة، قد يكون من الصعب على الفرق محاذاة الروبوت يدويًا بما يكفي لإطلاق الكرة بشكل صحيح. غالبًا ما تستخدم ألعاب مسابقة
فيكس للروبوتات عناصر لعبة ملونة مختلفة، وبالتالي، ستكون الميزة الكبيرة هي تصميم روبوت مزود بجهاز استشعار الرؤية. في لعبة نقطة التحول، على سبيل المثال، كان من الممكن استخدام مستشعر الرؤية للكشف عن الأعلام ثم محاذاة الروبوت بشكل صحيح من أجل عمل لقطات دقيقة. من المهم ملاحظة أن مستشعرات الرؤية حساسة للإضاءة في بيئات مختلفة. في بيئات المنافسة، هناك وقت لضبط مستشعر الرؤية وضبط مستشعر الرؤية هو ممارسة مهمة يجب على الفرق تبنيها.
![]() قم بتوسيع نطاق تعلمك
قم بتوسيع نطاق تعلمك
لتوسيع هذا النشاط، اطلب من طلابك تصميم وتحديد مشروع من شأنه أن يجعل الروبوت يتحرك نحو الأشياء الصفراء المكتشفة التي يمكن أن يستخدموها في لعبة المسابقة هذه!
اطلب من طلابك القيام بما يلي:
-
افتح مثال مشروع Clawbot (Drivetrain، No Gyro).
-
استخدم مشروع مثال الكشف عن الأشياء (الرؤية) كمرجع عند برمجة مستشعر الرؤية.
-
أضف مستشعر الرؤية إلى تكوين Clawbot (مجموعة نقل الحركة، بدون جيروسكوب) ثم قم بتكوين مستشعر الرؤية للكشف عن الأجسام الحمراء والزرقاء. ارجع إلى البرنامج التعليمي لتكوين مستشعر الرؤية أو انقر هنا لمزيد من المعلومات.
- قم ببرمجة Clawbot للتحرك نحو الكائن المكتشف. يمكن حتى برمجة Clawbot لرفع ذراعه كما لو كان لتبديل العلم!
- قم بتنزيل وتشغيل المشروع لملاحظة ما إذا كان مستشعر الرؤية يمكنه اكتشاف الأجسام الصفراء مثل الكرات الصفراء في لعبة نقطة تحول VRC. إذا تمكن مستشعر الرؤية من اكتشاف الأجسام، فهل يتحرك الروبوت بناءً على تلك الأشياء المكتشفة ؟ للحصول على المساعدة، شاهد فيديو البرنامج التعليمي Download and Run a Project.
- إذا سمح الوقت، قم بإعداد حقل لعبة مشابه لحقل نقطة التحول. تدرب على استخدام مستشعر الرؤية للسماح للروبوت بالتحرك لتسجيل النقاط!