
الاستعداد لتحدي بيانات الرؤية - القائم على الكتل
![]() صندوق أدوات المعلم
- الغرض من هذا النشاط
صندوق أدوات المعلم
- الغرض من هذا النشاط
يوفر مستشعر الرؤية مجموعة متنوعة من البيانات التي يمكن استخدامها بعد ذلك في المشاريع. تسمح كتل الاستشعار للمستخدم بالتقاط لقطات للمشروع، وتحديد ما إذا كان الكائن موجودًا، وتحديد العدد الموجود، وتحديد إحداثيات مركز الكائن X و Y داخل لقطة مستشعر الرؤية، وتحديد عرض الكائن وارتفاعه بالبكسل داخل اللقطة. سيقدم هذا النشاط جميع الكتل ذات الصلة اللازمة لجمع تلك المعلومات استعدادًا لتحدي بيانات الرؤية. فيما
يلي الخطوط العريضة لتحدي بيانات رؤية ريثينك:
-
راجع مجموعة بيانات كاملة من المعلومات التي تم جمعها من كتل استشعار مستشعر الرؤية.
-
أكمل مجموعة بيانات جزئية من المعلومات التي تم جمعها من مستشعر الرؤية حول لقطة مختلفة.
-
أنشئ مجموعة بيانات بناءً على لقطة وكتل استشعار مستشعر الرؤية.
كتل استشعار مستشعر الرؤية
يحتوي VEXcode V5 على كتل استشعار لمستشعر الرؤية. أول اثنين استخدمتهما بالفعل في قسم التشغيل لالتقاط لقطة وللتحقق مما إذا كان الكائن موجودًا.
في الشكل أدناه، ترى أن كتلة اللقطة التقطت لقطة GREENBOX. تم تحديد الكائن، GREENBOX، في اللقطة وبالتالي فإن الإجابة على ما إذا كان موجودًا صحيحة.
دعونا نلقي نظرة على كتل الاستشعار الأخرى هذه وما تخبرنا به قيمها.
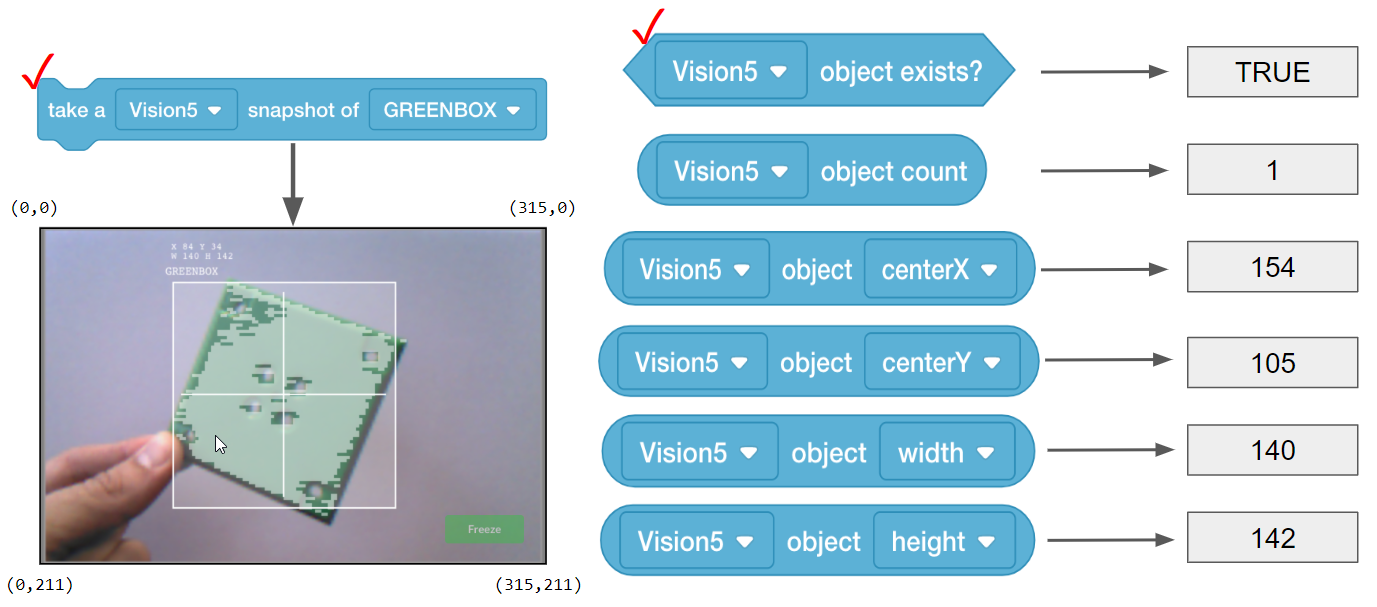
- تخبرنا كتلة عدد الكائنات بعدد كائنات GREENBOX الموجودة في اللقطة. هنا، تم اكتشاف واحد فقط.
- تخبرنا القيمة المركزية X ما إذا كان كائن GREENBOX على يسار أو يمين نقطة مركز الروبوت. تذكر، يجب تركيب مستشعر الرؤية في منتصف الروبوت المواجه للأمام وبالتالي فإن عرض اللقطة هو عرض الروبوت.
- إذا كان المركز X أكبر من 157.5، يكون الجسم على يمين نقطة مركز الروبوت.
- إذا كان المركز X أقل من 157.5، يكون الجسم على يسار نقطة مركز الروبوت.
- تخبرنا القيمة المركزية Y ما إذا كان GREENBOX أعلى أو أقل من نقطة مركز الروبوت.
- إذا كان المركز Y أكبر من 105.5، يكون الجسم أقل من نقطة مركز الروبوت.
- إذا كان المركز Y أقل من 105.5، يكون الجسم أعلى من نقطة مركز الروبوت.
- تخبرنا قيم العرض والارتفاع عن مدى قرب GREENBOX من الروبوت.
- سيكون الجسم ذو الحجم نفسه أكبر في العرض والارتفاع عندما يقترب من الروبوت.
![]() صندوق أدوات المعلم
-
لماذا هذه القراءة ؟
صندوق أدوات المعلم
-
لماذا هذه القراءة ؟
توفر معلومات التعليمات داخل VEXcode V5 أيضًا معلومات حول الكتل ولكن هنا، يتم وضع البيانات التي يتم جمعها في سياقها فيما يتعلق بما تخبر به المستخدم على وجه التحديد عن الكائن في اللقطة.
ملاحظات:
-
يتم استخدام قيم centerX و centerY للقطة بأكملها لتحديد ما إذا كان الكائن إلى اليسار/اليمين أو أعلى/أسفل نقطة مركز الروبوت. يتم حسابها بقسمة العدد الإجمالي للبكسل على هذا المحور على اثنين (على سبيل المثال، centerX من اللقطة = 315/2 = 157.5).
يمكننا أن نفترض أن النقطة المركزية للروبوت هي نفس النقطة المركزية لقطة مستشعر الرؤية لأنه يجب تركيب مستشعر الرؤية في وسط الروبوت وتوجيهه للأمام. يجب أن يؤخذ موضع مستشعر الرؤية على بنية الروبوت والدرجة التي قد يكون بها مستشعر الرؤية زاويًا لأسفل في الاعتبار عند الحكم على موضع الجسم بالنسبة لنقطة مركز الروبوت (أو مستشعر الرؤية).
-
تزداد قيم Y لأسفل داخل اللقطة. تأكد من أن الطلاب يدركون ذلك قبل الانتقال إلى الجزء التالي.
كيف يتم حساب قيم المركز X والمركز Y ؟
يتم حساب القيم بناءً على الإحداثيات داخل اللقطة. تم حساب عرض الكائن وارتفاعه بالفعل. يتتبع
مستشعر الرؤية قيم X و Y للزاوية العلوية اليسرى من الجسم. أدناه، تلك الإحداثيات هي (84، 34).
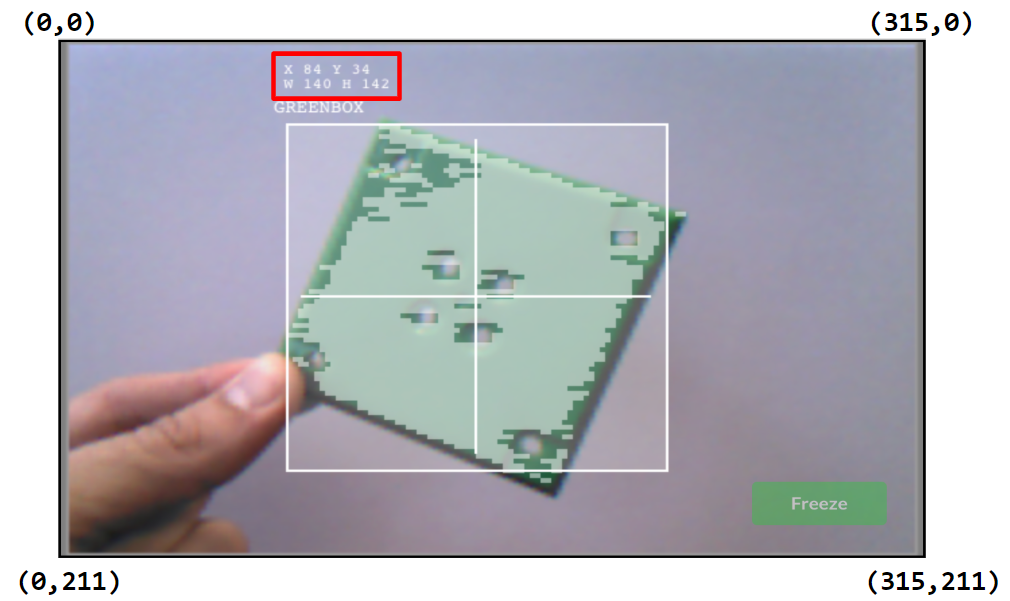
يمكن حساب قيم المركز X والمركز Y بناءً على إحداثيات الزاوية العلوية اليسرى (84، 34)، وقيم العرض (W 140) والارتفاع (H 142) المقدمة.
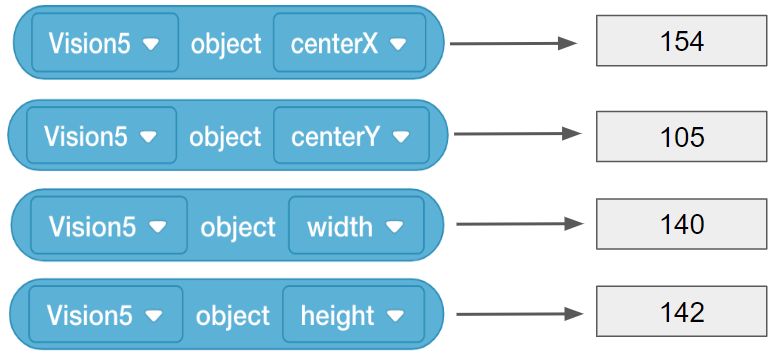
- centerX = 140/2 + 84 = 154
- centerX = نصف عرض الكائن المضاف إلى أقصى يسار الإحداثي X
- centerY = 142/2 + 34 = 105
- centerY = نصف ارتفاع الجسم المضاف إلى أعلى إحداثياته Y
![]() صندوق أدوات المعلم
-
اختتام هذه الصفحة
صندوق أدوات المعلم
-
اختتام هذه الصفحة
تأكد من أن الطلاب يفهمون الرياضيات التي ينطوي عليها إيجاد قيم المركز X والمركز Y. سيحتاجون إليها للنشاط في الصفحة التالية.
اسأل عن كيفية ارتباط قيم (84، 34) و (W 140، H 142) بالإحداثيات الواردة في زوايا اللقطة. يجب أن يدرك الطلاب أن اللقطة بأكملها تم تعيينها على مستوى إحداثي بناءً على عدد وحدات البكسل. تتراوح قيم X من 0 إلى 315 (بعرض 316 بكسل) وتتراوح قيم Y من 0 إلى 211 (بطول 212 بكسل). تعتمد إحداثيات الكائن وحجمه على عدد وحدات البكسل التي يشغلها الكائن على طول تلك المحاور.