
Préparez-vous pour le défi Vision Data - basé sur les blocs
![]() Boîte à outils de l'enseignant
-
Le but de cette activité
Boîte à outils de l'enseignant
-
Le but de cette activité
Le capteur de vision fournit une variété de données qui peuvent ensuite être utilisées dans des projets. Les blocs de détection permettent à l'utilisateur de demander au projet de prendre des instantanés, de décider si l'objet existe, de décider combien il en existe, de déterminer les coordonnées X et Y du centre de l'objet dans l'instantané du capteur de vision et de déterminer la largeur et la hauteur de l'objet en pixels dans l'instantané. Cette activité présentera tous les blocs connexes nécessaires à la collecte de ces informations en préparation du Défi des données visuelles.
Voici un aperçu du défi Vision Data de Rethink :
-
Passez en revue un ensemble complet d'informations recueillies à partir des blocs de détection du capteur de vision.
-
Complétez un ensemble de données partielles d'informations collectées à partir du capteur de vision sur un instantané différent.
-
Créez un ensemble de données basé sur un instantané et les blocs de détection du capteur de vision.
Les blocs de détection du capteur de vision
VEXcode V5 a des blocs de détection pour le capteur de vision. Les deux premiers que vous avez déjà utilisés dans la section Lecture pour prendre un instantané et vérifier si l'objet existe.
Dans la figure ci-dessous, vous voyez que le bloc d' instantanés a capturé l'instantané GREENBOX. L'objet, GREENBOX, a été identifié dans l'instantané et la réponse à la question de savoir s'il existe est donc VRAIE.
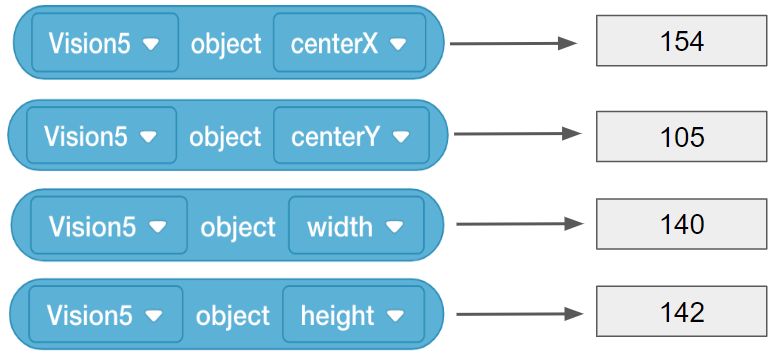
Examinons ces autres blocs de détection et ce que leurs valeurs nous disent.
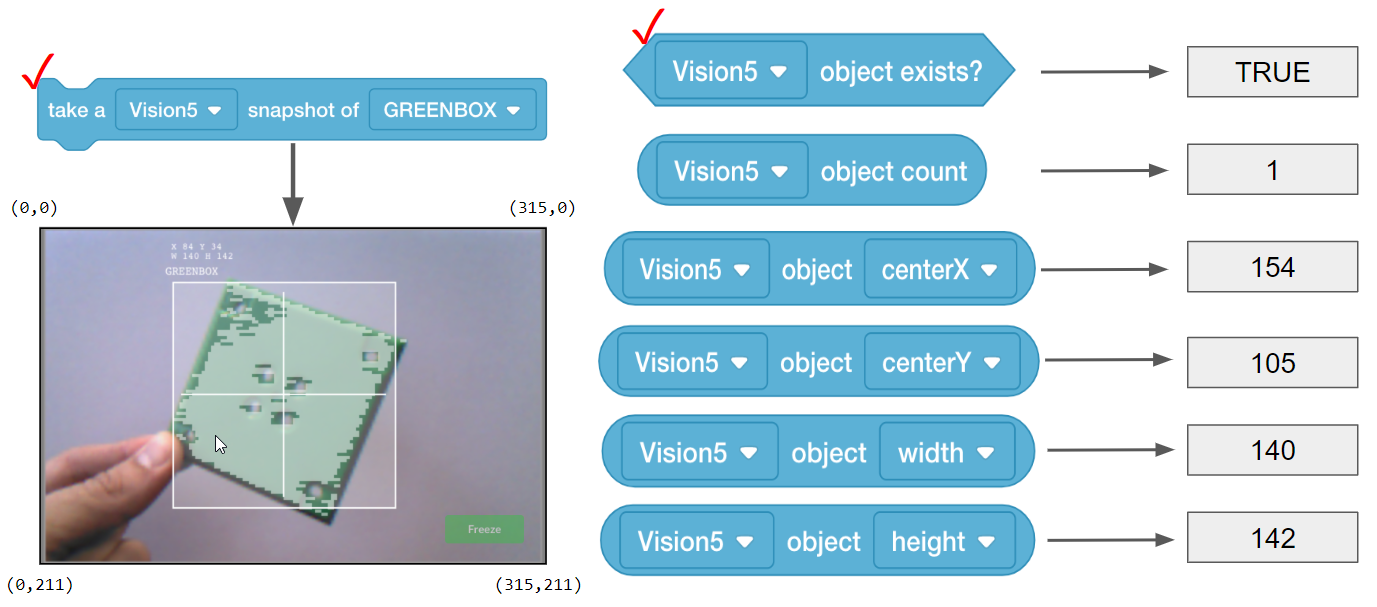
- Le bloc de comptage d' objets nous indique combien d'objets GREENBOX se trouvent dans l'instantané. Ici, il n'y en a qu'un seul détecté.
- La valeur du centre X nous indique si l'objet GREENBOX se trouve à gauche ou à droite du centre du robot. N'oubliez pas que le capteur de vision doit être monté au milieu du robot face à l'avant et que la vue de l'instantané est donc la vue du robot.
- Si le centre X est supérieur à 157,5, l'objet se trouve à droite du centre du robot.
- Si le centre X est inférieur à 157,5, l'objet se trouve à gauche du centre du robot.
- La valeur Y centrale nous indique si le GREENBOX est supérieur ou inférieur au point central du robot.
- Si le centre Y est supérieur à 105,5, l'objet est inférieur au point central du robot.
- Si le centre Y est inférieur à 105,5, l'objet est plus haut que le centre du robot.
- Les valeurs de largeur et de hauteur nous indiquent à quel point le GREENBOX est proche du robot.
- L'objet de même taille sera plus grand en largeur et en hauteur à mesure qu'il se rapproche du robot.
![]() Boîte à outils de l'enseignant
-
Pourquoi cette lecture ?
Boîte à outils de l'enseignant
-
Pourquoi cette lecture ?
Les informations d'aide dans VEXcode V5 fournissent également des informations sur les blocs, mais ici, les données collectées sont contextualisées quant à ce qu'elles disent spécifiquement à l'utilisateur sur l'objet dans l'instantané.
Remarques :
-
Les valeurs centerX et centerY de l'ensemble de l'instantané sont utilisées pour déterminer si l'objet se trouve à gauche/droite ou au-dessus/en dessous du point central du robot. Ils sont calculés en divisant le nombre total de pixels sur cet axe par deux (par exemple, centerX de l'instantané = 315 / 2 = 157,5).
Nous pouvons supposer que le point central du robot est le même que le point central de l'instantané du capteur de vision, car le capteur de vision doit être monté au centre du robot et tourné vers l'avant. La position du capteur de vision sur la structure du robot et le degré auquel le capteur de vision peut être incliné vers le bas doivent être pris en compte lors de l'évaluation de la position de l'objet par rapport au point central du robot (ou du capteur de vision).
-
Les valeurs Y augmentent vers le bas dans l'instantané. Assurez-vous que les élèves le reconnaissent avant de passer à la partie suivante.
Comment les valeurs du centre X et du centre Y sont-elles calculées ?
Les valeurs sont calculées en fonction des coordonnées de l'instantané. La largeur et la hauteur de l'objet sont déjà calculées.
Le capteur de vision suit les valeurs X et Y du coin supérieur gauche de l'objet. Ci-dessous, ces coordonnées sont (84, 34).
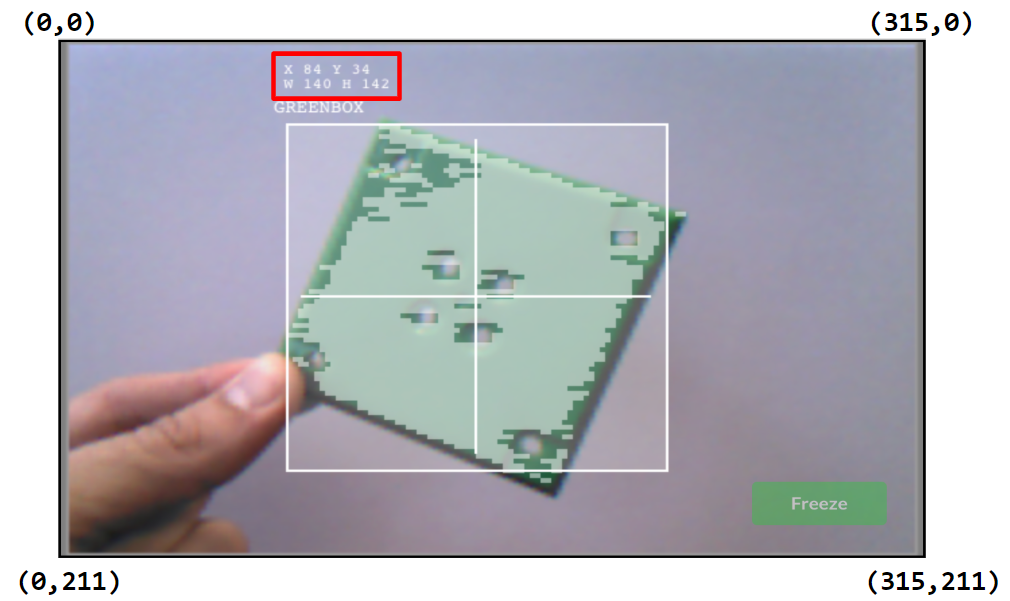
Les valeurs de centre X et de centre Y peuvent être calculées sur la base des coordonnées du coin supérieur gauche (84, 34) et des valeurs de largeur (W 140) et de hauteur (H 142) fournies.
- centerX = 140/2 + 84 = 154
- centerX = la moitié de la largeur de l'objet ajouté à sa coordonnée X la plus à gauche
- centerY = 142/2 + 34 = 105
- centerY = la moitié de la hauteur de l'objet ajouté à sa coordonnée Y la plus élevée
![]() Boîte à outils de l'enseignant
-
Conclusion de cette page
Boîte à outils de l'enseignant
-
Conclusion de cette page
Assurez-vous que les élèves comprennent les mathématiques impliquées dans la recherche des valeurs du centre X et du centre Y. Ils en auront besoin pour l'activité de la page suivante.
Demandez comment les valeurs (84, 34) et (W 140, H 142) se rapportent aux coordonnées fournies dans les coins de l'instantané. Les élèves doivent reconnaître que l'instantané entier est mappé sur un plan de coordonnées en fonction du nombre de pixels. Les valeurs X vont de 0 à 315 (316 pixels de large) et les valeurs Y de 0 à 211 (212 pixels de haut). Les coordonnées et la taille de l'objet sont basées sur le nombre de pixels que l'objet prend le long de ces axes.