
ভিশন ডেটা চ্যালেঞ্জের জন্য প্রস্তুতি নিন - C++
![]() শিক্ষক টুলবক্স
-
এই কার্যকলাপের উদ্দেশ্য
শিক্ষক টুলবক্স
-
এই কার্যকলাপের উদ্দেশ্য
ভিশন সেন্সর বিভিন্ন ধরণের তথ্য সরবরাহ করে যা পরবর্তীতে প্রকল্পগুলিতে ব্যবহার করা যেতে পারে। সেন্সিং নির্দেশনা ব্যবহারকারীকে প্রকল্পটিকে স্ন্যাপশট নিতে, বস্তুটি বিদ্যমান কিনা তা নির্ধারণ করতে, কতগুলি বিদ্যমান তা নির্ধারণ করতে, ভিশন সেন্সরের স্ন্যাপশটের মধ্যে বস্তুর কেন্দ্র X এবং Y স্থানাঙ্ক নির্ধারণ করতে এবং স্ন্যাপশটের মধ্যে পিক্সেলগুলিতে বস্তুর প্রস্থ এবং উচ্চতা নির্ধারণ করতে দেয়। এই কার্যকলাপটি ভিশন ডেটা চ্যালেঞ্জের প্রস্তুতির জন্য প্রয়োজনীয় সমস্ত সম্পর্কিত নির্দেশনা উপস্থাপন করবে।
রিথিঙ্কের ভিশন ডেটা চ্যালেঞ্জের একটি রূপরেখা নিচে দেওয়া হল:
-
ভিশন সেন্সরের সেন্সিং নির্দেশ থেকে সংগৃহীত তথ্যের একটি সম্পূর্ণ ডেটা সেট পর্যালোচনা করুন।
-
একটি ভিন্ন স্ন্যাপশট সম্পর্কে ভিশন সেন্সর থেকে সংগৃহীত তথ্যের একটি আংশিক ডেটা সেট সম্পূর্ণ করুন।
-
একটি স্ন্যাপশট এবং ভিশন সেন্সরের সেন্সিং নির্দেশাবলীর উপর ভিত্তি করে একটি ডেটা সেট তৈরি করুন।
ভিশন সেন্সরের সেন্সিং নির্দেশাবলী
VEXcode V5 এর ভিশন সেন্সরের জন্য সেন্সিং নির্দেশনা রয়েছে । প্রথম দুটি ছবি যা আপনি ইতিমধ্যেই প্লে বিভাগে ব্যবহার করেছেন একটি স্ন্যাপশট নিতে এবং বস্তুটি বিদ্যমান কিনা তা পরীক্ষা করতে।
নীচের চিত্রে, আপনি দেখতে পাচ্ছেন যেস্ন্যাপশটGREENBOX স্ন্যাপশটটি ধারণ করেছে। স্ন্যাপশটে GREENBOX নামক বস্তুটি শনাক্ত করা হয়েছে এবং তাই এটি বিদ্যমান কিনা তার উত্তর হল সত্য।
আসুন এই অন্যান্য সেন্সিং নির্দেশাবলী এবং তাদের মানগুলি আমাদের কী বলে তা দেখি।
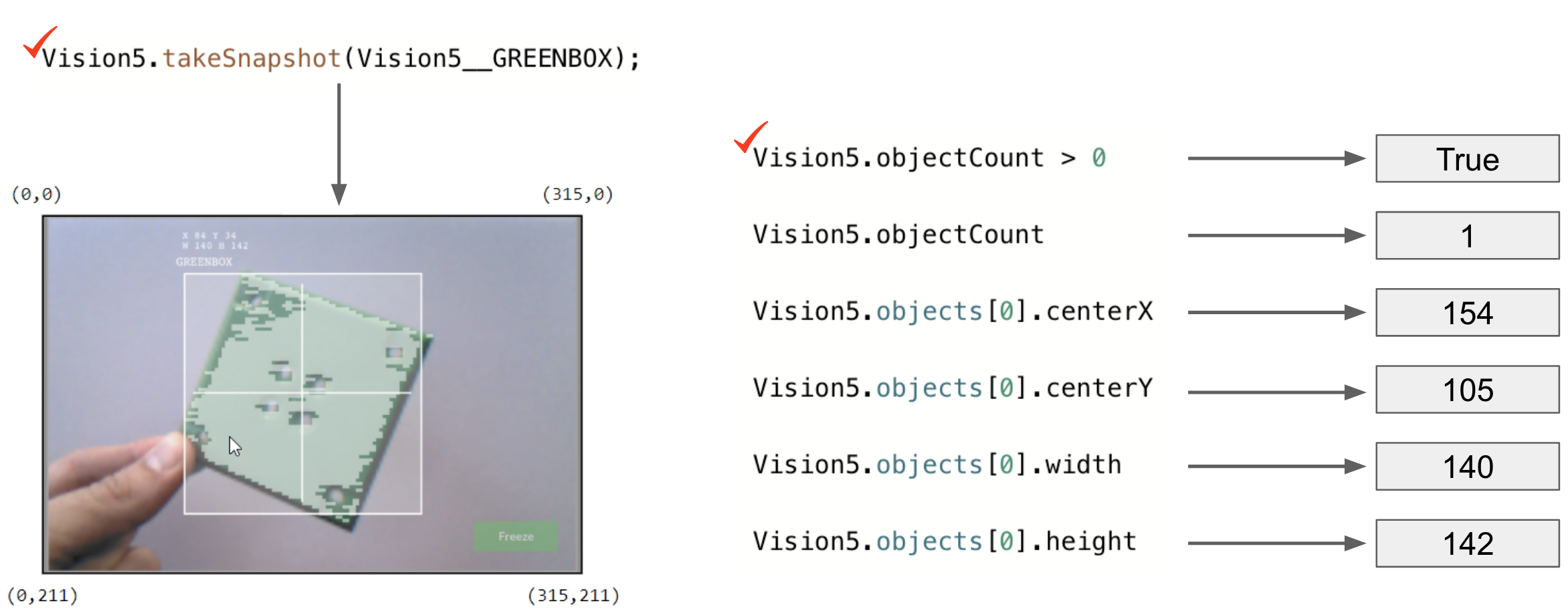
- অবজেক্ট কাউন্টনির্দেশনা আমাদের বলে যে স্ন্যাপশটে কতগুলি GREENBOX অবজেক্ট রয়েছে। এখানে, শুধুমাত্র 1 টি সনাক্ত করা হয়েছে ।
- সেন্টার এক্স ভ্যালু আমাদের বলে যে GREENBOX অবজেক্টটি রোবটের সেন্টার পয়েন্টের বাম বা ডানদিকে আছে কিনা । মনে রাখবেন, ভিশন সেন্সরটি সামনের দিকে তাকিয়ে থাকা রোবটের মাঝখানে লাগানো উচিত এবং তাই স্ন্যাপশটটির দৃষ্টিভঙ্গি রোবটের দৃষ্টিভঙ্গি ।
- যদি কেন্দ্র X 157.5 এর চেয়ে বড় হয়, তবে বস্তুটি রোবটের কেন্দ্র বিন্দুর ডানদিকে ।
- যদি কেন্দ্র X 157.5 এর কম হয়, তবে বস্তুটি রোবটের কেন্দ্র বিন্দুর বাম দিকে ।
- সেন্টার Y ভ্যালু আমাদের বলে যে GREENBOX রোবটের সেন্টার পয়েন্টের চেয়ে বেশি বা কম কিনা ।
- যদি কেন্দ্র Y 105.5 এর চেয়ে বড় হয়, তাহলে বস্তুটি রোবটের কেন্দ্রবিন্দুর চেয়ে কম ।
- যদি কেন্দ্র Y 105.5 এর কম হয়, তাহলে বস্তুটি রোবটের কেন্দ্রবিন্দুর চেয়ে বেশি ।
- প্রস্থ এবং উচ্চতার মানগুলি আমাদের জানায় যে GREENBOX রোবটটির কতটা কাছাকাছি ।
- একই আকারের বস্তুটি প্রস্থ এবং উচ্চতায় বড় হবে কারণ এটি রোবটের কাছাকাছি চলে আসে ।
![]() শিক্ষক টুলবক্স
-
কেন এই পঠন?
শিক্ষক টুলবক্স
-
কেন এই পঠন?
VEXcode V5 এর মধ্যে থাকা সাহায্যের তথ্য নির্দেশাবলী সম্পর্কেও তথ্য প্রদান করে কিন্তু এখানে, সংগৃহীত তথ্যগুলি স্ন্যাপশটে থাকা বস্তু সম্পর্কে ব্যবহারকারীকে বিশেষভাবে কী বলে তা প্রাসঙ্গিকভাবে উল্লেখ করা হয়েছে।
নোট:
-
পুরো স্ন্যাপশটের centerX এবং centerY মানগুলি নির্ধারণ করতে ব্যবহৃত হয় যে বস্তুটি রোবটের কেন্দ্রবিন্দুর বাম/ডান দিকে নাকি উপরে/নীচে। ঐ অক্ষের মোট পিক্সেল সংখ্যাকে দুই দ্বারা ভাগ করে এগুলো গণনা করা হয় (যেমন, স্ন্যাপশটের সেন্টারএক্স = 315 / 2 = 157.5)।
আমরা ধরে নিতে পারি যে রোবটের কেন্দ্রবিন্দুটি ভিশন সেন্সরের স্ন্যাপশটের কেন্দ্রবিন্দুর মতোই, কারণ ভিশন সেন্সরটি রোবটের কেন্দ্রে এবং সামনের দিকে মুখ করে মাউন্ট করা উচিত। রোবটের (অথবা ভিশন সেন্সরের) কেন্দ্রবিন্দুর সাপেক্ষে বস্তুর অবস্থান বিচার করার সময়, রোবটের গঠনে ভিশন সেন্সরের অবস্থান এবং ভিশন সেন্সরটি নিচের দিকে কতটা কোণাকুনি হতে পারে তা বিবেচনায় নেওয়া উচিত।
-
স্ন্যাপশটের মধ্যে Y মানগুলি নিচের দিকে বৃদ্ধি পায়। পরবর্তী অংশে যাওয়ার আগে নিশ্চিত করুন যে শিক্ষার্থীরা এটি বুঝতে পারছে।
কেন্দ্র X এবং কেন্দ্র Y মানগুলি কীভাবে গণনা করা হয়?
স্ন্যাপশটের মধ্যে স্থানাঙ্কের উপর ভিত্তি করে মানগুলি গণনা করা হয় । বস্তুর প্রস্থ এবং উচ্চতা ইতিমধ্যেই গণনা করা হয়েছে।
ভিশন সেন্সর বস্তুর উপরের বাম কোণার X এবং Y মান ট্র্যাক করে। নীচে, সেই স্থানাঙ্কগুলি হল (84, 34) ।
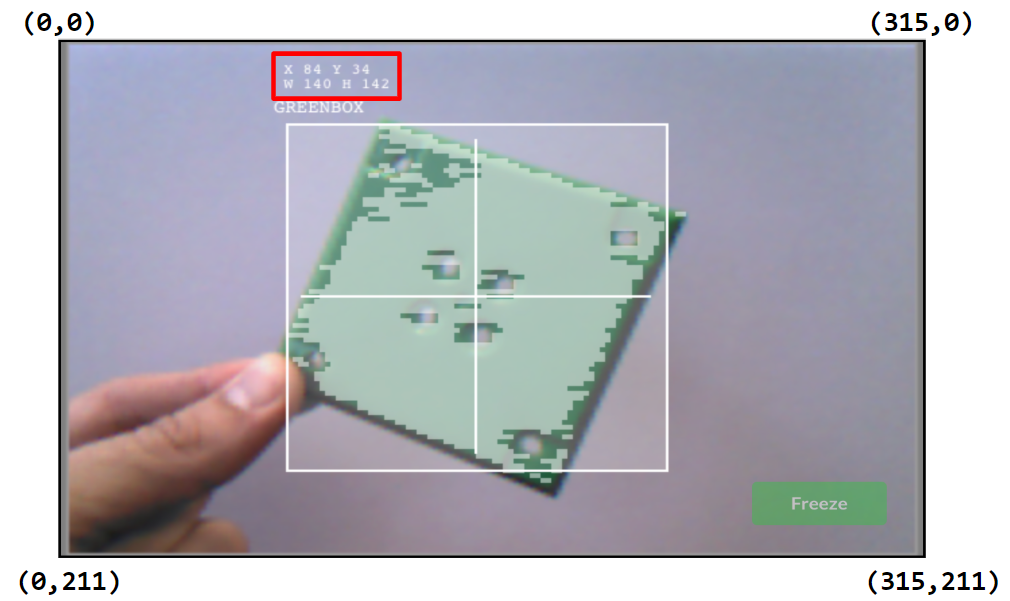
কেন্দ্র X এবং কেন্দ্র Y মানগুলি উপরের বাম কোণের (84, 34) স্থানাঙ্ক এবং প্রস্থ (W 140) এবং উচ্চতা (H 142) মানের উপর ভিত্তি করে গণনা করা যেতে পারে ।
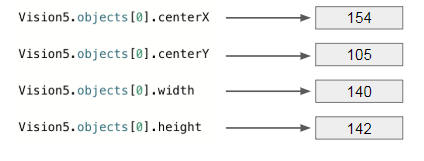
- সেন্টারএক্স = ১৪০/২ + ৮৪ =১৫৪
- centerX = তার বামতম X স্থানাঙ্কের সাথে যুক্ত বস্তুর প্রস্থের অর্ধেক
- কেন্দ্রY = 142/2 + 34 =105
- centerY = তার শীর্ষতম Y স্থানাঙ্ক যোগ করা বস্তুর অর্ধেক উচ্চতা
![]() শিক্ষক টুলবক্স
-
এই পৃষ্ঠাটি শেষ করা হচ্ছে
শিক্ষক টুলবক্স
-
এই পৃষ্ঠাটি শেষ করা হচ্ছে
নিশ্চিত করুন যে শিক্ষার্থীরা কেন্দ্র X এবং কেন্দ্র Y এর মান খুঁজে বের করার সাথে জড়িত গণিত বুঝতে পারে। পরবর্তী পৃষ্ঠার কার্যকলাপের জন্য তাদের এটির প্রয়োজন হবে।
(84, 34) এবং (W 140, H 142) মানগুলি স্ন্যাপশটের কোণে প্রদত্ত স্থানাঙ্কের সাথে কীভাবে সম্পর্কিত তা জিজ্ঞাসা করুন। শিক্ষার্থীদের বুঝতে হবে যে সম্পূর্ণ স্ন্যাপশটটি পিক্সেলের সংখ্যার উপর ভিত্তি করে একটি স্থানাঙ্ক সমতলে ম্যাপ করা হয়েছে। X মান 0 থেকে 315 (316 পিক্সেল প্রস্থ) এবং Y মান 0 থেকে 211 (212 পিক্সেল লম্বা) পর্যন্ত। বস্তুর স্থানাঙ্ক এবং আকার বস্তুটি ঐ অক্ষ বরাবর কত পিক্সেল দখল করে তার উপর নির্ভর করে।