
Using the Vision Sensor - Blocks-based
Get the hardware required, your engineering notebook, and open VEXcode V5.
| Quantity | Materials Needed |
|---|---|
| 1 |
VEX V5 Classroom Starter Kit |
| 1 |
VEXcode V5 (latest version, Windows, macOS, Chromebook) |
| 1 |
Engineering Notebook |
| 1 |
Configuring a Vision Sensor (Tutorial) |
| 1 |
Tuning the Vision Sensor (Tutorial) |
| 1 |
Detecting Objects (Vision) example project |
This activity will give you the tools to use the Vision Sensor.
You can use the Help information inside of VEXcode V5 to learn about the blocks. For guidance in using the Help feature, see the Using Help tutorial.

Step 1: Open an Example Project.
VEXcode V5 contains many different example projects. You’ll use one of them in this exploration. For help and tips on using example projects, check out the Using Examples and Templates tutorial.
Then, open the Detecting Objects (Vision) example project by completing the following steps:
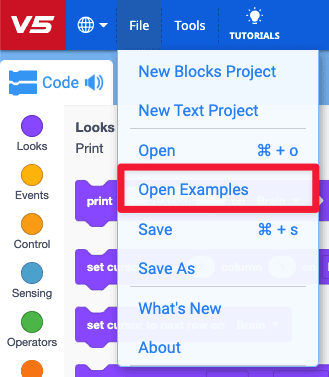
- Open the File menu.
- Select Open Examples.
- Use the filter bar at the top of the application and select "Sensing."

Select and open the Detecting Objects (Vision) example project.
Save your project as Detecting Objects.
- Check to make sure the project name Detecting Objects is now in the window in the center of the toolbar.

- For addition help, view the Use Example Projects and Templates tutorial video.
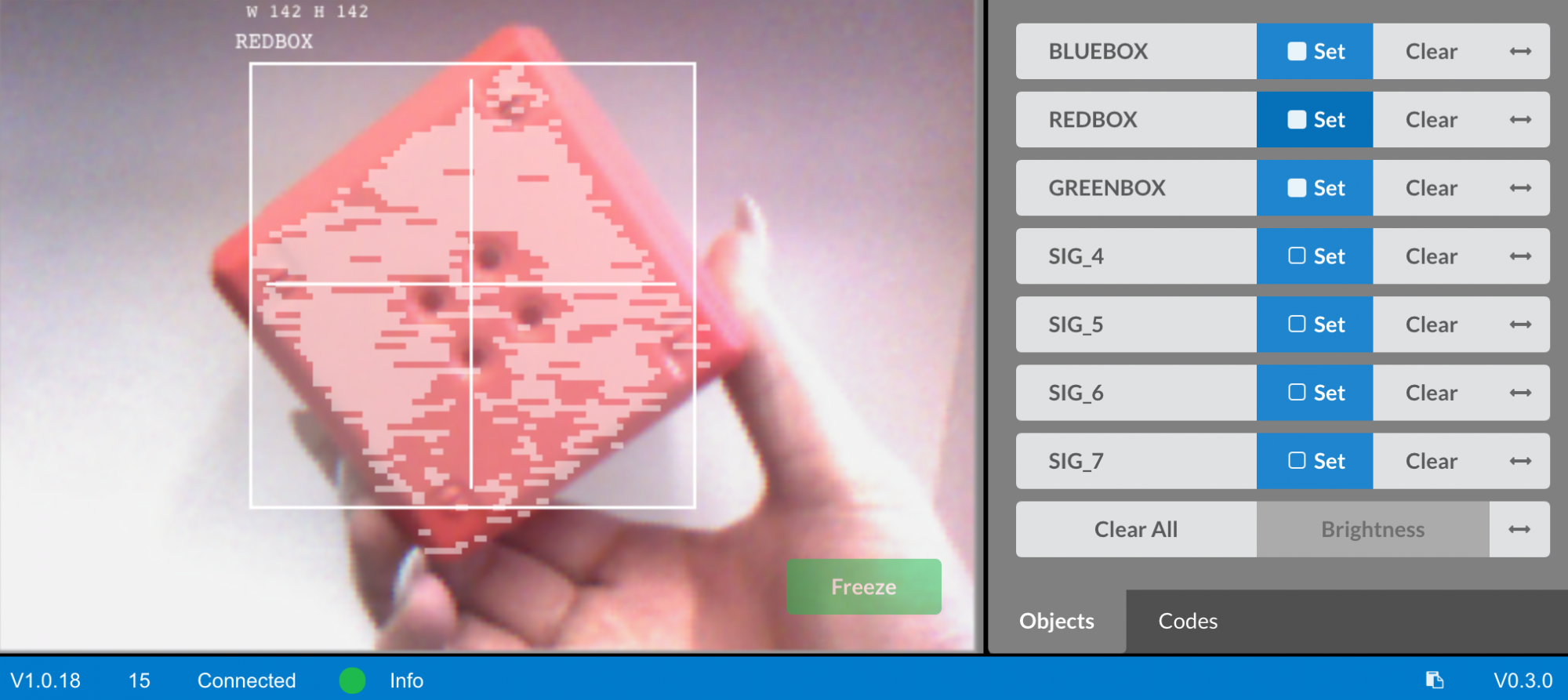
Step 2: Configuring and Using the Vision Sensor
- Begin by watching the Configuring a Vision Sensor tutorial video.
- Next, configure the Vision Sensor for three colored objects: red, green, and blue.
Open the previously saved Detecting Objects (Vision) example project.
How is the Vision Sensor being used in this project? Predict what will happen when the project is run and write down the predictions in your engineering notebook.
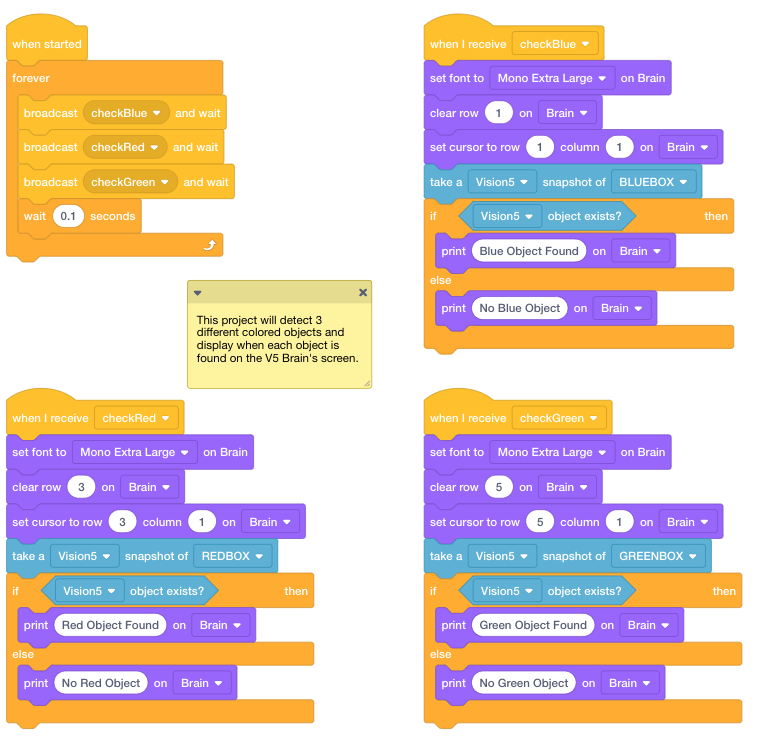
Download and Run the project. Place different colored objects in front of the Vision Sensor and observe the robot's behavior. Record in your engineering notebook how your prediction was different or correct compared to what you actually observed from the project.
For additional help, view the Download and Run a Project tutorial video.
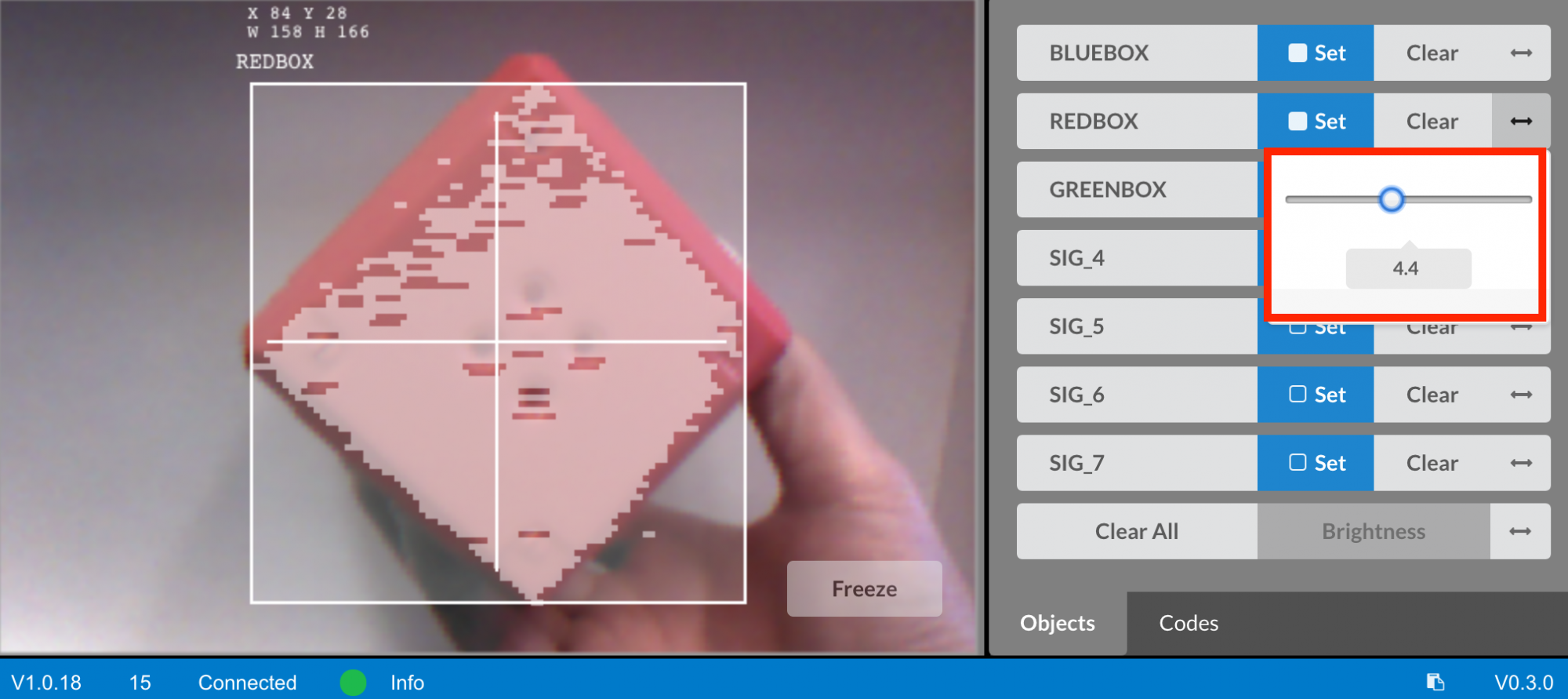
Step 3: Tuning the Vision Sensor
Often times an object is configured to be recognized by the Vision Sensor in one environment, for example, in a classroom. When the Vision Sensor is then taken into a different environment such as a competition setting, the object may not be recognized by the Vision Sensor. This is often due to a change in lighting after the Vision Sensor has already been configured. To solve this problem, you may have to tune your Vision Sensor.
- Begin by watching the Tuning the Vision Sensor tutorial video.
- Next, Tune the Vision Sensor for the three colored objects: red, green, and blue.
Open the previously saved Detecting Objects (Vision) example project.
How will tuning the Vision Sensor affect how well it can detect objects? Take the Clawbot to a different part of the room with more or less light.

Download and Run the project. Place different colored objects in front of the Vision Sensor and observe the robot's behavior. Document in your engineering notebook how well the Vision Sensor detects objects. Does the Vision Sensor need tuned after it changed locations?
For additional help, view the Download and Run a Project tutorial video.
Tune the Vision Sensor as necessary. Test the Vision Sensor after it has been tuned to determine if it can detect objects better and make adjustments as needed.