Robotický fotbal
4 Lessons
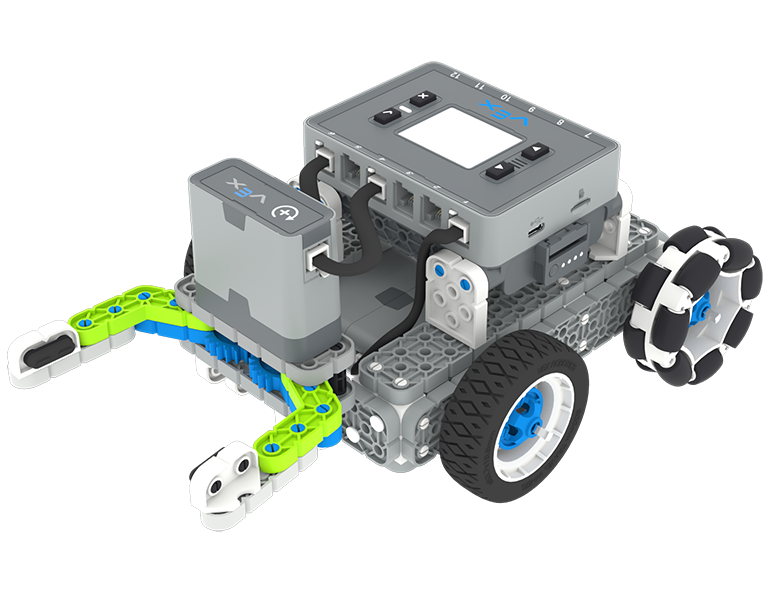
V této lekci se naučíte, jak si na svém robotovi vytvořit manipulátor, který vám umožní chytat, přihrávat a vstřelit co nejvíce gólů jako robotický fotbalista v soutěži Robot Soccer!
Visit the Teacher's Portal for teacher support materials and videos about the content and facilitation of the Robot Soccer Lessons.
Lekce 1: Úvod
V této lekci si postavíte jednoduchého Clawbota, nabijete ovladač a baterii a připravíte se na programování.
Lekce 2: Manipulátoři
V této lekci se dozvíte o pasivních a aktivních manipulátorech a návrhu sání, abyste si mohli zdokonalit návrh svého robota a soutěžit v soutěži One-on-One Robot Soccer!
Lekce 3: Soutěž robotů ve fotbale
V této lekci využijete znalosti z předchozí lekce k soutěži v robotickém fotbale!

Lekce 4: Závěr
V této lekci se zamyslíte nad danou kapitolou a identifikujete souvislosti mezi tím, co jste dělali, a související kariérou v oblasti STEM.

Sběratel kostek
6 Lessons
V této lekci prozkoumáte rozdíl mezi řízením za volantem a autonomními výzvami, zatímco se naučíte řídit Clawbota a programovat ho pro třídění a skládání kostek v soutěži Sběratel kostek!
Visit the Teacher's Portal for teacher support materials and videos about the content and facilitation of the Cube Collector Lessons.

Lekce 1: Úvod
V této lekci se seznámíte se soutěží Sběratel kostek, postavíte si Clawbota a připravíte se na programování.

Lekce 2: Ovládání řidičem
V této lekci se naučíte používat program Driver Control na IQ Brain, abyste mohli řídit Clawbota, který skládá a boduje kostky na hřišti a účastní se soutěže Speed Stack Challenge.

Lekce 3: Kódování pro autonomní pohyby
V této lekci se naučíte, jak kódovat robota pro autonomní pohyby, včetně toho, jak naplánovat trajektorii robota. Poté vytvoříte projekt VEXcode IQ pro bodování a skládání kostek v autonomní výzvě Coding for Cubes.

Lekce 4: Používání více programů (autonomních a driverových)
V této lekci se dozvíte o přizpůsobení ovládacích prvků řidiče a o tom, jak můžete pomocí ovladače a VEXcode IQ optimalizovat strategii řidiče pro soutěžení v soutěži s ovládáním řidiče a autonomními jízdami.

Lekce 5: Soutěž sběratelů kostek
V této lekci využijete znalosti z předchozích lekcí k soutěži Sběratel kostek!

Lekce 6: Závěr
V této lekci se zamyslíte nad danou kapitolou a identifikujete souvislosti mezi tím, co jste dělali, a související kariérou v oblasti STEM.

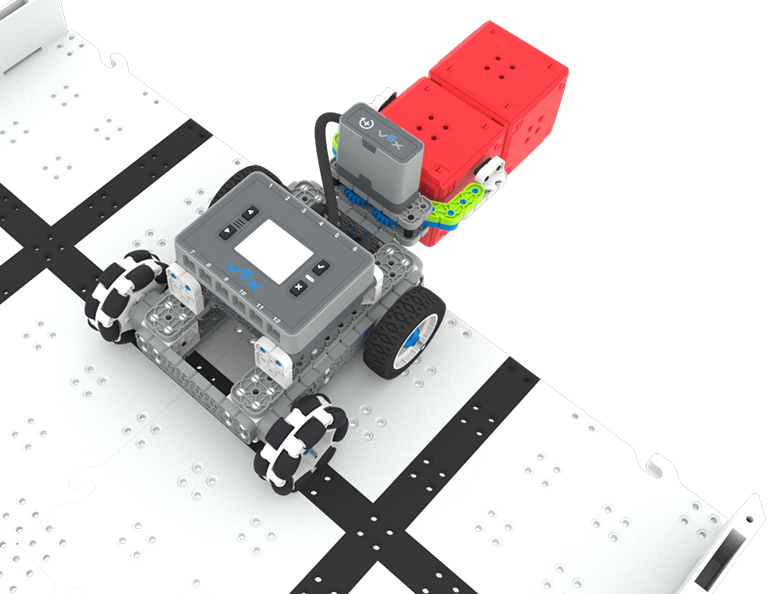
Ničitel hradu
6 Lessons
V této lekci prozkoumáte, jak pomocí optických a distančních senzorů vyhledávat, narážet a čistit krychlové „hrady“ a získávat body v soutěži Ničitel hradů!
Visit the Teacher's Portal for teacher support materials and videos about the content and facilitation of the Castle Crasher Lessons.

Lekce 1: Úvod
V této lekci se seznámíte se soutěží Castle Crasher, postavíte si BaseBota a připravíte se na programování.

Lekce 2: Castle Crasher bez senzorů
V této lekci se naučíte, jak vypočítávat úhly a měnit rychlost svého robota, abyste mohli soutěžit ve výzvě Tower Over.

Lekce 3: Castle Crasher + Senzor vzdálenosti
V této lekci se dozvíte, co je senzor vzdálenosti a jak ho lze použít ve vašem robotu. Dozvíte se také o bloku [Wait until] a o tom, jak jej lze použít v projektu VEXcode IQ. Pak využijete to, co jste se naučili, k soutěžení v Cube Crasher Challenge!

Lekce 4: Vytváření algoritmů
V této lekci se dozvíte o optickém senzoru a o tom, jak vytvořit algoritmus, který využívá zpětnou vazbu ze senzoru. Pak naprogramujete svého robota tak, aby autonomně hledal kostky a odtlačoval je z pole v rámci výzvy Zametání pole.

Lekce 5: Soutěž Castle Crasher
V této lekci využijete znalosti z předchozích lekcí k soutěži Castle Crasher!
Lekce 6: Závěr
V této lekci se zamyslíte nad danou kapitolou a identifikujete souvislosti mezi tím, co jste dělali, a kariérou v oboru STEM.
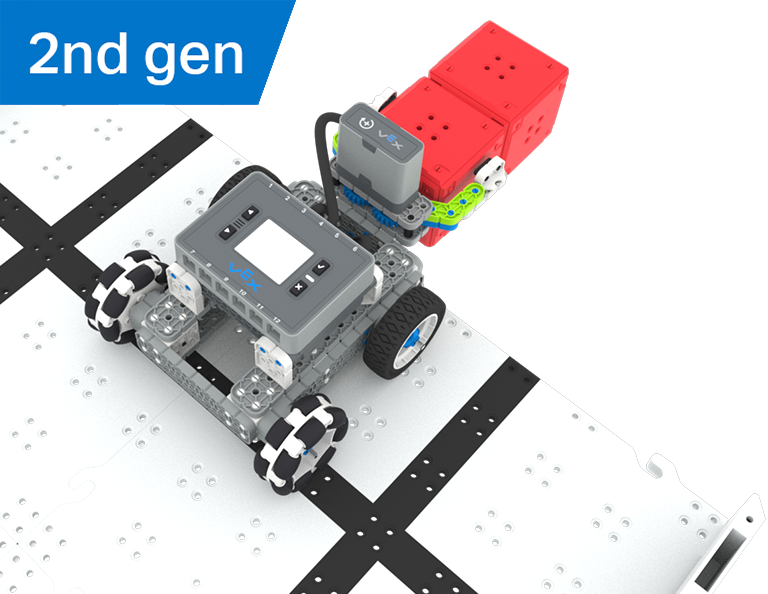
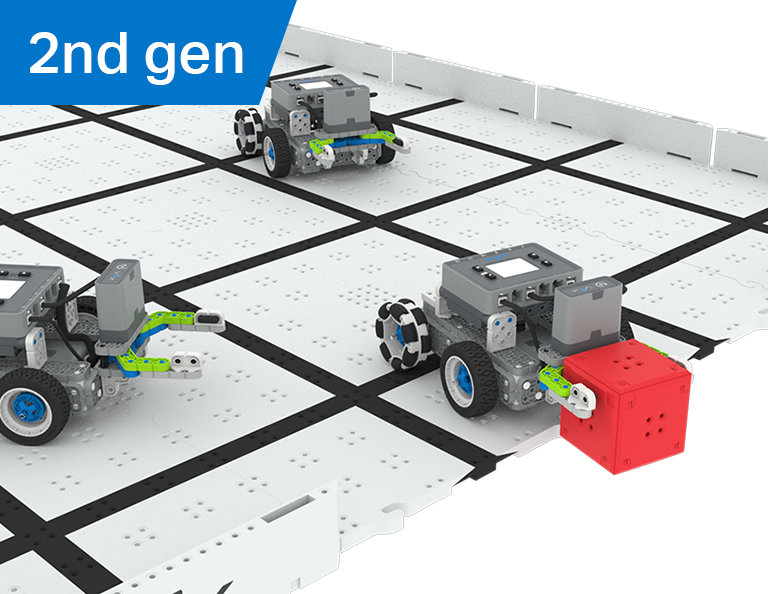
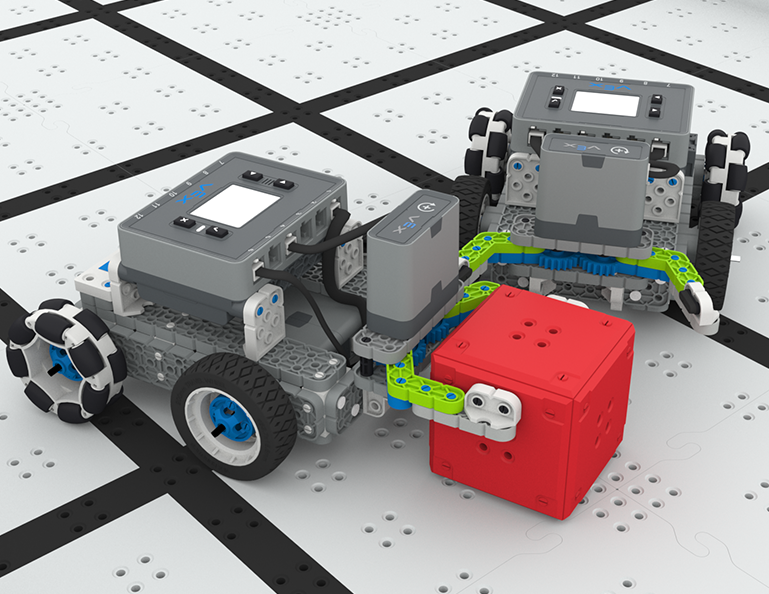
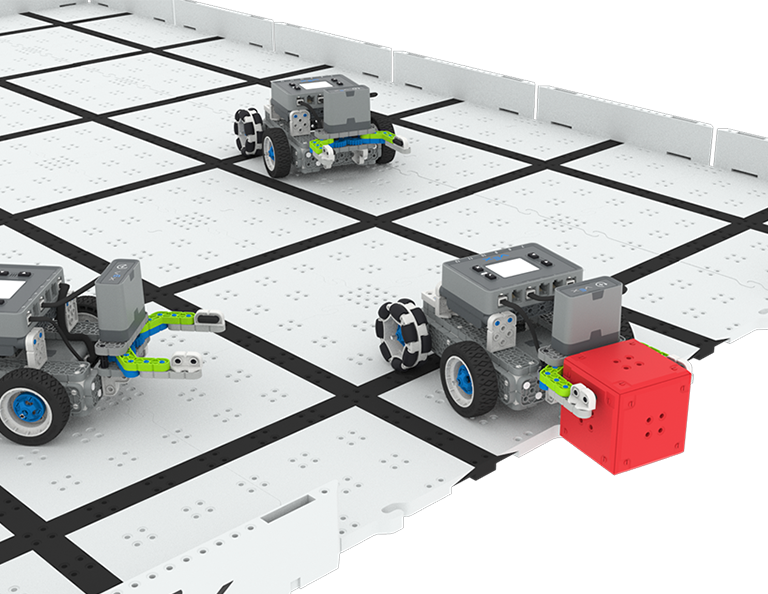
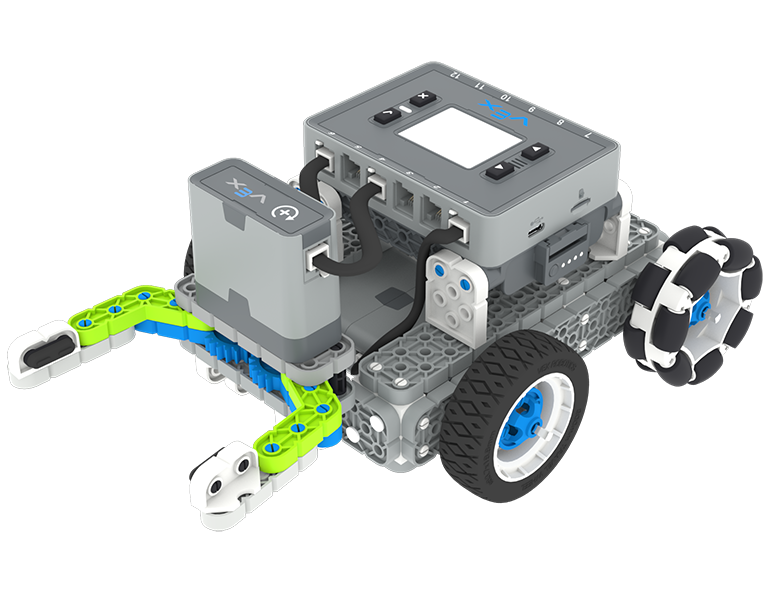
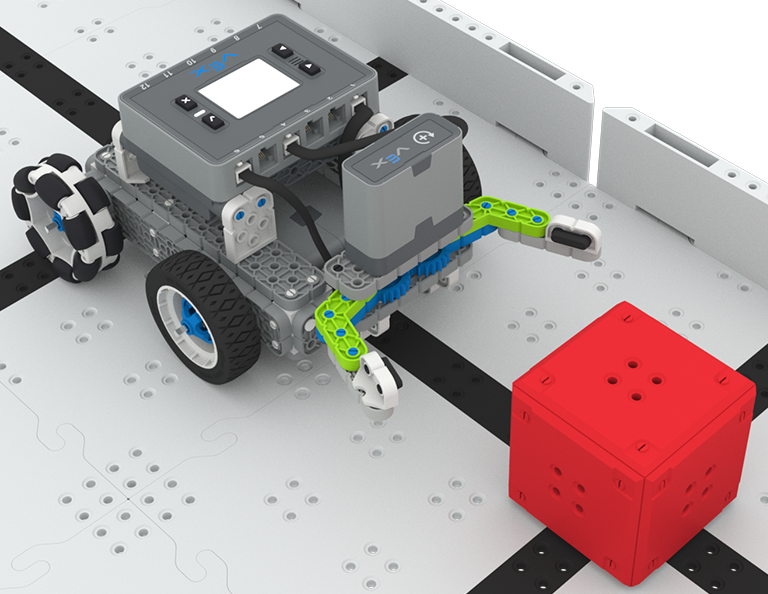
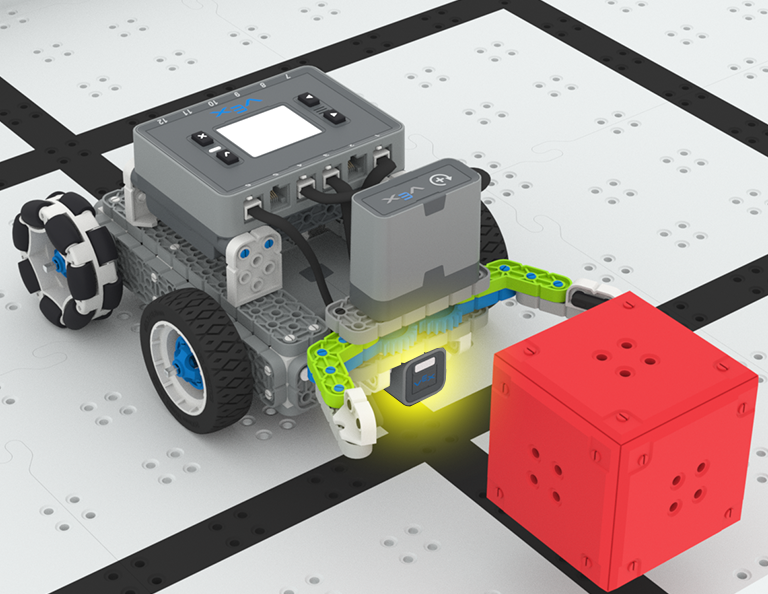
Honba za pokladem
5 Lessons
V této lekci si postavíte a naprogramujete jednoduchého drápaře s optickým senzorem, který bude rozpoznávat a sbírat červené kostky a bude se tak moci zúčastnit soutěže v hledání pokladu!
Visit the Teacher's Portal for teacher support materials and videos about the content and facilitation of the Treasure Hunt Lessons.
Lekce 1: Úvod
Seznámíte se se soutěží v honbě za pokladem, postavíte si jednoduchého drápového robota a připravíte se na programování.
Lekce 2: Dráp bez senzoru
V této lekci se naučíte používat bloky Drivetrain a Motion ve VEXcode IQ k naprogramování vašeho jednoduchého Clawbota pro sbírání a přesouvání kostek ve výzvě Clawbot Collector.
Lekce 3: Dráp se senzorem
V této lekci se naučíte programovat optický senzor, abyste v rámci výzvy Treasure Mover detekovali, sesbírali a přesunuli červenou kostku!
Lekce 4: Soutěž v hledání pokladu
V této lekci využijete to, co jste se naučili z předchozích lekcí, a budete se moci zúčastnit soutěže v honbě za pokladem!
Lekce 5: Závěr
V této lekci se zamyslíte nad danou kapitolou a identifikujete souvislosti mezi tím, co jste dělali, a kariérou v oboru STEM.
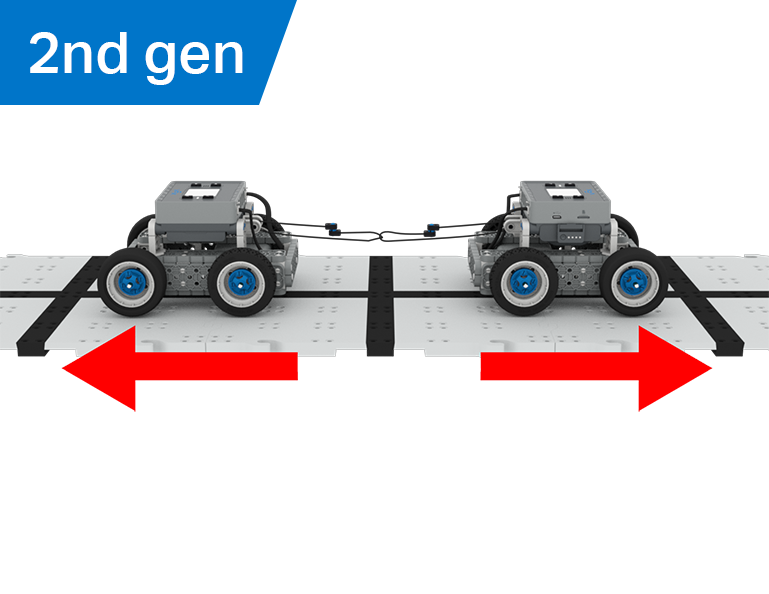
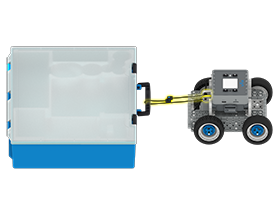
Přetahování lanem
6 Lessons
V této lekci prozkoumáte, jak mechanická výhoda a těžiště ovlivňují schopnost BaseBota tahat předměty, a navrhnete nejlepšího robota pro hru Tug of War!
Visit the Teacher's Portal for teacher support materials and videos about the content and facilitation of the Tug of War Lessons.
Lekce 1: Úvod
V této lekci se seznámíte se soutěží v přetahování lanem a postavíte BaseBota.
Lekce 2: Tahání objektů pomocí BaseBota
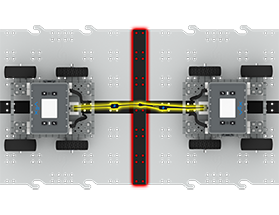
V této lekci si navrhnete lanové příslušenství, abyste si s BaseBotem procvičili tahání předmětů. Pak se zúčastníte výzvy Tah robotického traktoru.

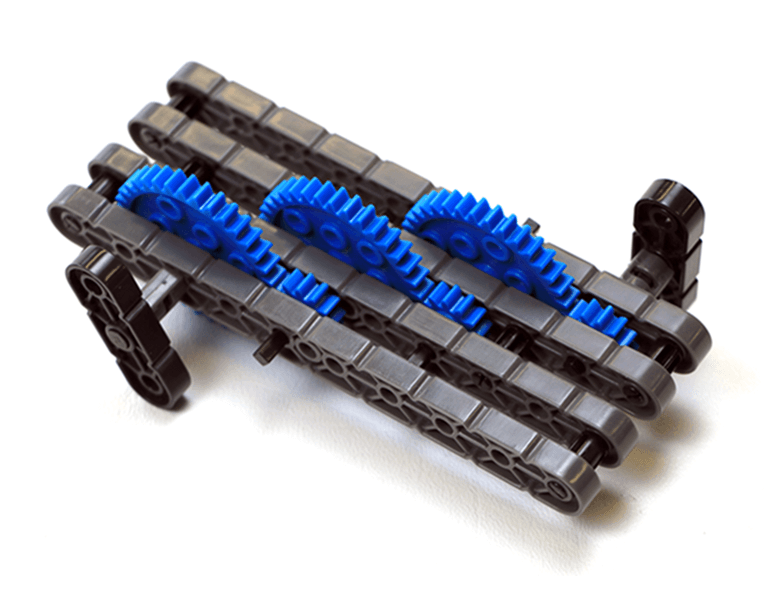
Lekce 3: Použití ozubeného soukolí
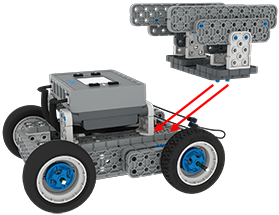
V této lekci přidáte k vašemu BaseBotu ozubené kolo, abyste prozkoumali, jak různé konfigurace ozubených kol ovlivňují schopnost robota táhnout předmět. Pak se zúčastníte soutěže Gear Train Tractor Pull.
Lekce 4: Přidávání hmoty
V této lekci přidáte hmotu svému BaseBotu, abyste prozkoumali, jak změna těžiště ovlivňuje schopnost robota táhnout předmět. Pak se utkáte v přetahované výzvě.
Lekce 5: Soutěž v přetahování lanem
V této lekci využijete znalosti z předchozích lekcí k soutěži v přetahování!
Lekce 6: Závěr
V této lekci se zamyslíte nad tím, co jste se v této lekci naučili, a identifikujete souvislosti mezi tím, co jste dělali, a kariérou v oboru STEM.
STEM LabsVEX 123
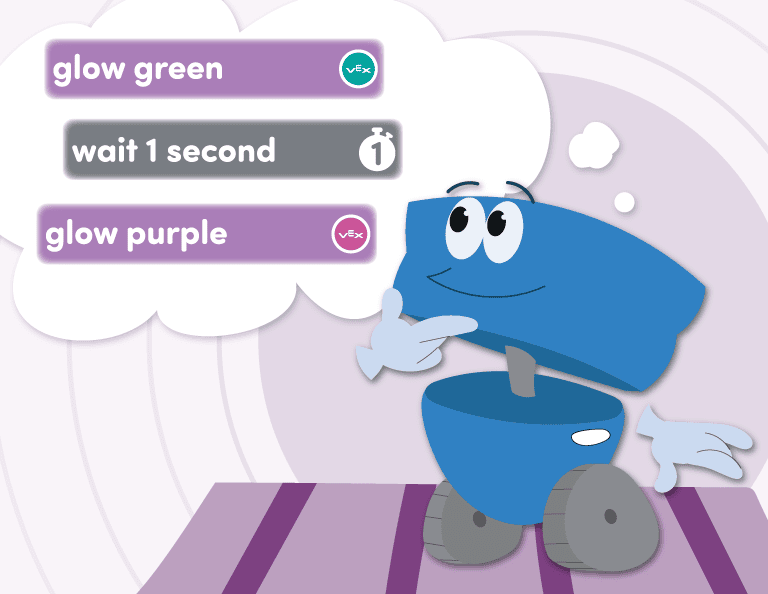
Uklidňující robot
2 Labs
Naprogramujte svého robota 123 tak, aby předváděl chování spojené s různými pocity, a vytvořte uklidňující kód, který můžete s robotem 123 provádět společně!


Štítek zmrazení týmu
6 Lessons
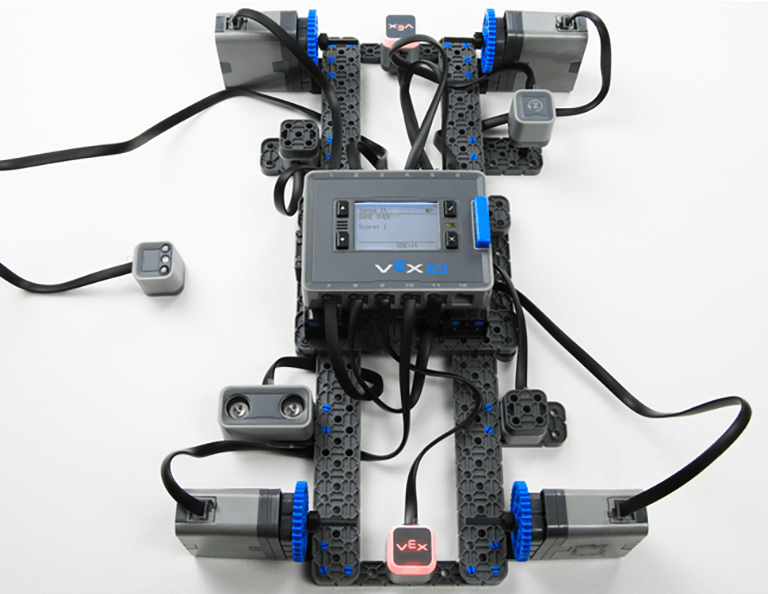
V této lekci budete řídit BaseBota pomocí IQ Controlleru, vybírat kola a přidávat senzory, abyste mohli soutěžit v soutěži Team Freeze Tag!
Visit the Teacher's Portal for teacher support materials and videos about the content and facilitation of the Team Freeze Tag Lessons.
Lekce 1: Úvod
V této lekci se seznámíte se soutěží Team Freeze Tag, sestavíte baterii a ovladač a postavíte BaseBota.
Lekce 2: Jízda s ovladačem IQ
V této lekci se naučíte, jak řídit BaseBot pomocí IQ Controlleru a procvičíte si řízení, abyste se mohli zúčastnit náročné aktivity, kdy budete řídit osmičku!
Lekce 3: Výměna kol
V této lekci se naučíte, jak vyměnit kola robota BaseBot a experimentovat s různými kombinacemi kol, abyste zlepšili jeho schopnost hrát Tag.

Lekce 4: Přidání nárazníkového spínače a dotykové LED diody
V této lekci přidáte k vašemu BaseBotu nárazníkový spínač a dotykovou LED diodu a budete soutěžit v soutěži 1 na 1 Freeze Tag!
Lekce 5: Soutěž týmů o zmrazení tagů
V této lekci zkombinujete všechny dovednosti naučené v předchozích lekcích a zahrajete si hru Team Freeze Tag!
Lekce 6: Závěr
V této lekci se zamyslíte nad danou kapitolou a identifikujete souvislosti mezi tím, co jste dělali, a kariérou v oboru STEM.

Grabber
0 Lessons
Sestrojte zařízení, které používá nůžkové mechanismy k přeměně směru pohybu, a prozkoumejte mechaniku nůžkového mechanismu.