
Einleitung
In dieser Lektion erfahren Sie mehr über den optischen Sensor und wie er mit [Wenn dann] - und [Wiederholen] -Blöcken in einem Projekt verwendet werden kann, um Ihren Clawbot dazu zu bringen, einen Buckyball basierend auf seiner Farbe zu sammeln. Dann wendest du an, was du gelernt hast, um an der Treasure Mover Challenge teilzunehmen, bei der dein Roboter nur die rote Schatzkugel sammeln muss. Sehen Sie sich die Animation unten an, um ein Beispiel dafür zu sehen, wie sich ein Roboter während eines erfolgreichen Laufs in der Treasure Mover Challenge autonom bewegen kann.
Optischer Sensor hinzufügen
In dieser Lektion erfahren Sie mehr über Sensor-Feedback und wie Sie Ihren Roboter mit diesem Feedback codieren können.
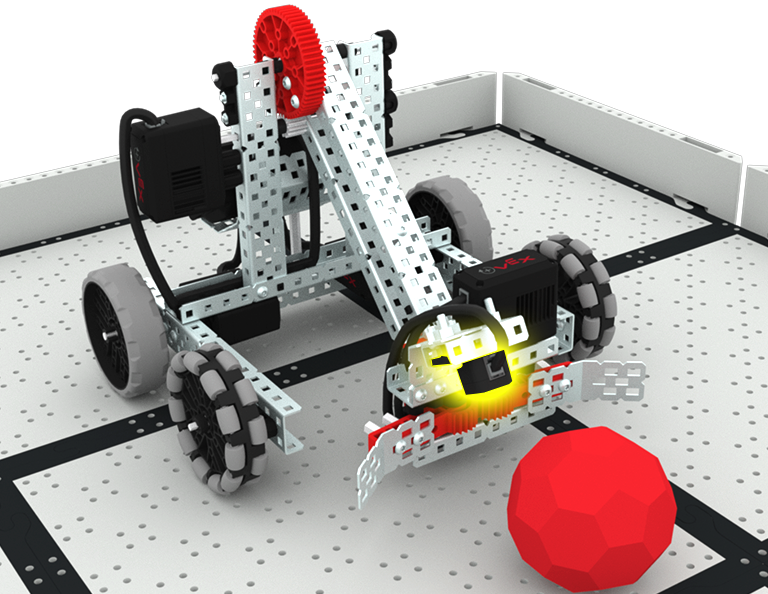
Fügen Sie Ihrem Clawbot einen optischen Sensor hinzu, wie in diesem Bild gezeigt.
- Verbinden Sie einen 1x2x1x4 C-Kanal mit einem optischen Sensor.
- Montieren Sie den C-Kanal an einem abgewinkelten Zwickel und befestigen Sie diesen dann an der Kralle.
Wähle Weiter aus > , um mehr über den optischen Sensor und die Blöcke zu erfahren, mit denen du ein Projekt erstellen kannst, um einen roten Buckyball zu sammeln.