
Accumulateurs de trémie de déversement
Une trémie est une grande zone de stockage dans laquelle des objets sont placés. Avec les trémies de déversement, la façon dont les objets sont libérés est différente de la façon dont ils sont collectés.
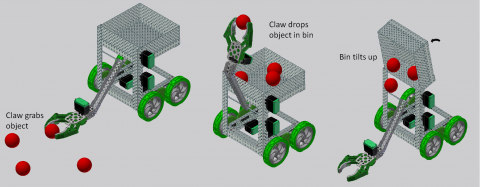
Sur ce robot, un bras à griffes ramasse des objets et les jette dans la trémie, puis la trémie s'incline en arrière comme un camion à benne basculante pour marquer les objets dans un but.