
Dumping Hopper Accumulatori
Una tramoggia è una grande area di stoccaggio in cui vengono posizionati gli oggetti. Con le tramogge di scarico, il modo in cui gli oggetti vengono rilasciati è diverso dal modo in cui vengono raccolti.
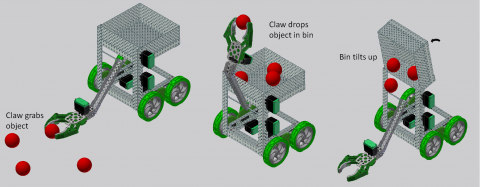
Su questo robot un braccio ad artiglio raccoglie gli oggetti e li scarica nella tramoggia, quindi la tramoggia si inclina all'indietro come un camion ribaltabile per segnare gli oggetti in una porta.