







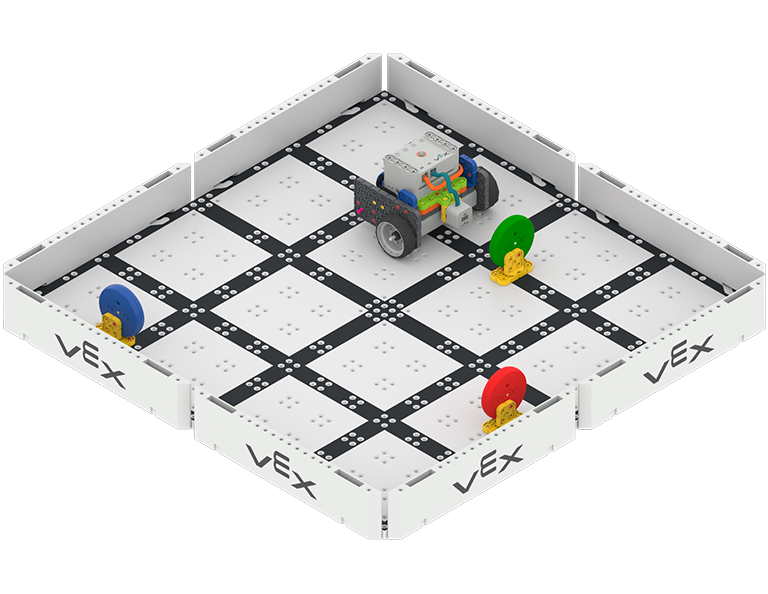
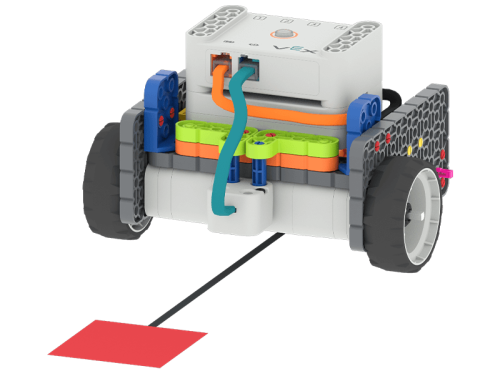
Usa il sensore oculare per guidare il tuo robot.
Activity Link
https://docs.google.com/document/d/10iXdBz6BpKCxUXJnYHnBBmn1ExQsakCA2iySsPMuZI0/edit?usp=sharing
Activity Image
Immagine
VEX Platform
Builds
Activity PDF Link
https://content.vexrobotics.com/assets/education/stem-labs/docs/go/Activities/GO Activity - Color Code It.pdf
Activity Docx Link
https://content.vexrobotics.com/assets/education/stem-labs/docs/go/Activities/GO Activity - Color Code It.docx