
![]() Mokytojo įrankių rinkinys
Veiklos
Mokytojo įrankių rinkinys
Veiklos
Šis tyrimas supažindins studentus su pagrindiniais važiavimo pirmyn, atbuline eiga ir laukimo programavimo veiksmais. Šie pagrindiniai įgūdžiai padės jiems sėkmingai įveikti „Automed Challenge“ šios STEM laboratorijos pabaigoje, kai jie naršys ligoninės aukšte naudodami „Speedbot“.
Naudojant V5 Speedbot (Drivetrain 2-motor, No Gyro) šablono projektą, mokiniai gali užprogramuoti Speedbot judėti pirmyn, naudodamiesi tik viena instrukcija.
„Speedbot“ yra pasirengęs judėti!
Šis tyrimas suteiks jums įrankius, leidžiančius suprogramuoti savo Speedbot paprastiems judesiams. Pasibaigus šiai veiklai, jūs įsitrauksite į krepšinio pratimų iššūkį, elgdamiesi į priekį, atbuline eiga ir laukdami.
![]() Mokytojo įrankių rinkinys
Mokytojo įrankių rinkinys
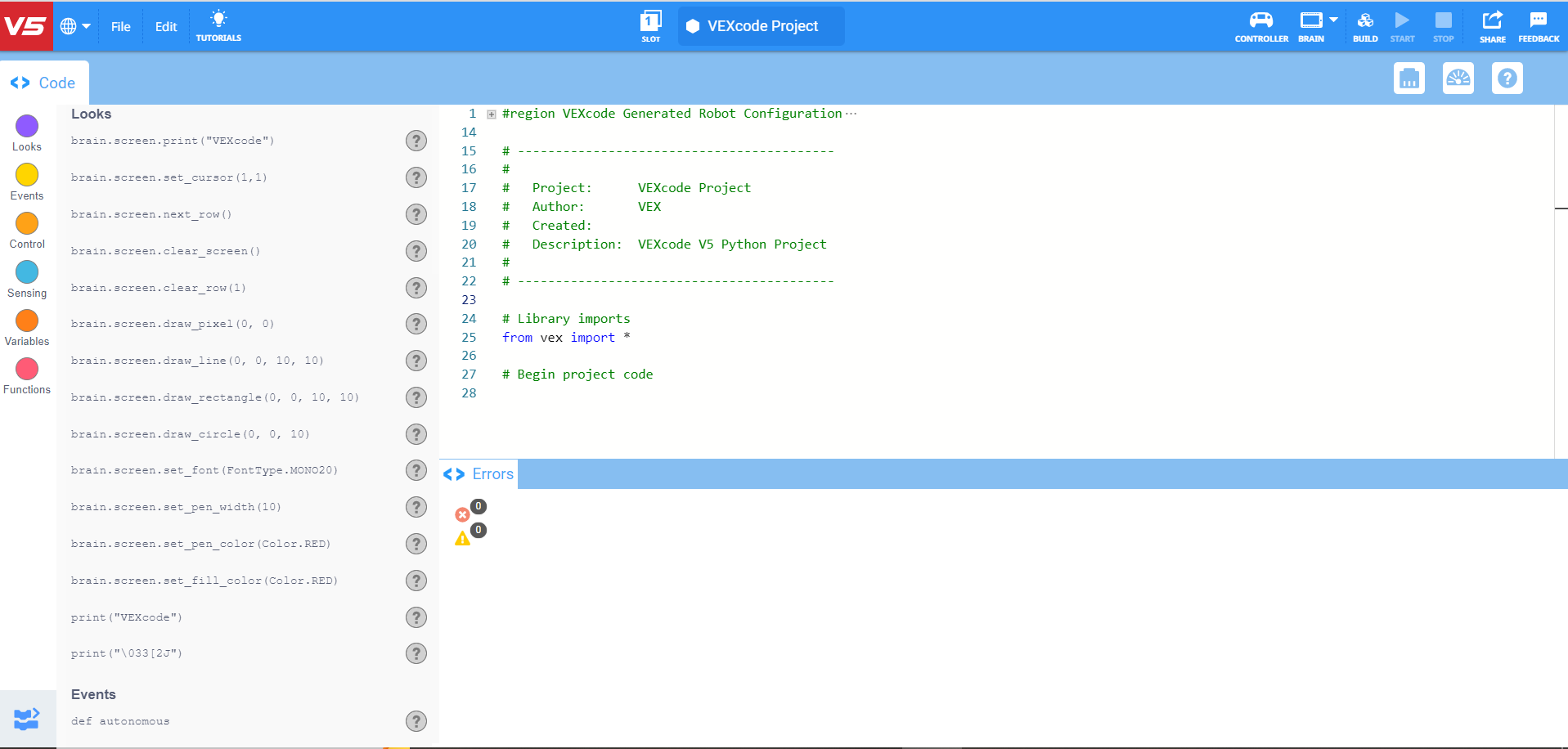
Čia yra VEXcode V5 vartotojo sąsajos apžvalga. Mokiniai bus supažindinti su šiais skirtukais / mygtukais šios Medbot STEM laboratorijos užsiėmimų metu. Visoje STEM laboratorijoje taip pat pateikiamos nuorodos, kuriose pateikiama daugiau informacijos apie šiuos skirtukus / mygtukus.
-
VEXcode V5 instrukcijos, kurios bus naudojamos šiame tyrime:
-
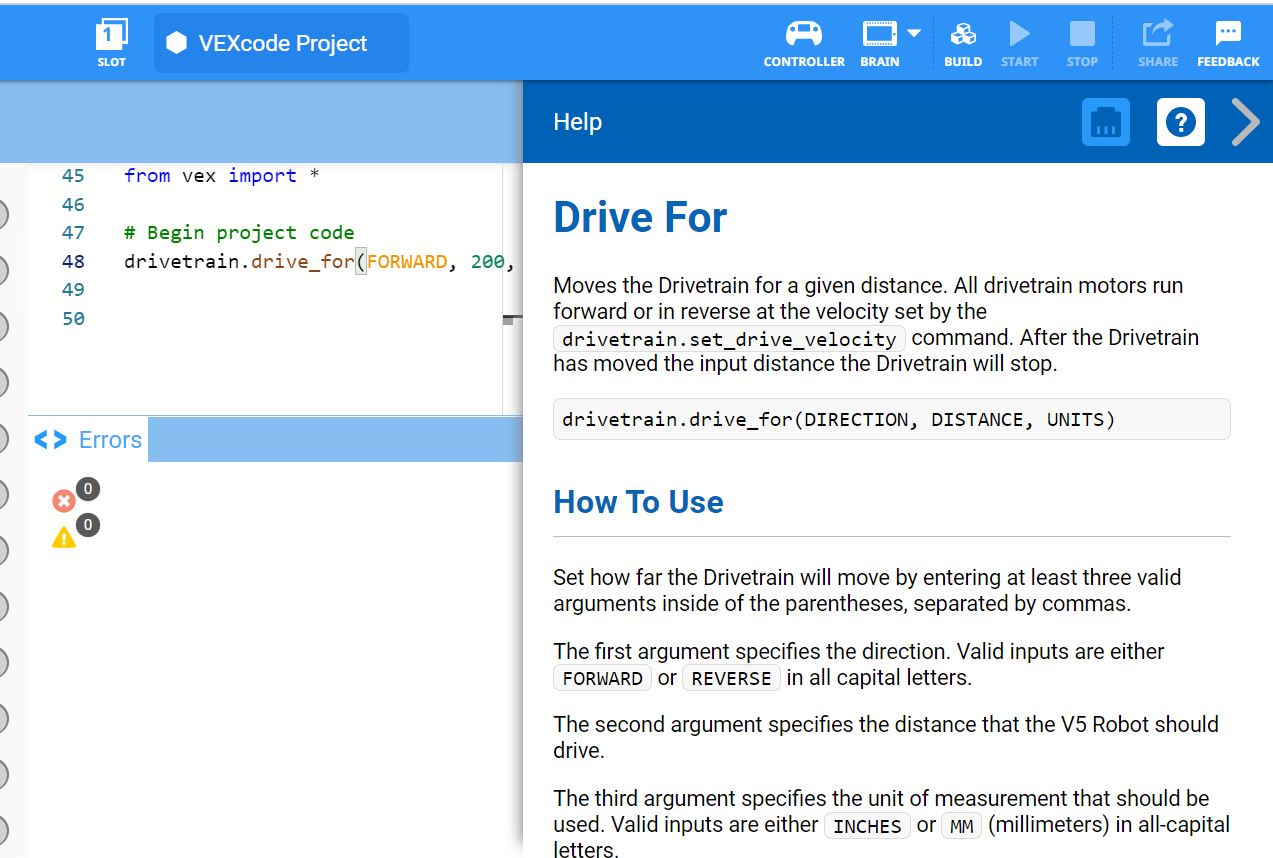
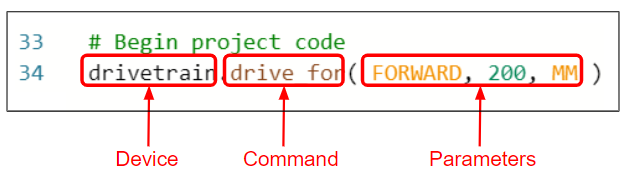
drivetrain.drive_for(FORWARD, 200, MM)
-
laukti (1, sekundės)
-
-
Norėdami sužinoti daugiau informacijos apie instrukcijas, pasirinkite Žinynas, tada pasirinkite klaustuko piktogramą šalia komandos, kad pamatytumėte daugiau informacijos.
-
Įsitikinkite, kad turite reikiamą techninę įrangą, inžinerinį nešiojamąjį kompiuterį ir VEXcode V5 atsisiųstą ir paruoštą.
![]() Mokytojo patarimai
Mokytojo patarimai
Jei mokinys pirmą kartą naudoja VEXcode V5, bet kuriuo tyrinėjimo metu jis gali remtis vadovėliais. Mokymai yra įrankių juostoje. 
| Kiekis | Reikalingos medžiagos |
|---|---|
| 1 |
„Speedbot“ robotas |
| 1 |
Įkrauta roboto baterija |
| 1 |
VEXkodas V5 |
| 1 |
USB kabelis (jei naudojate kompiuterį) |
| 1 |
Inžinerijos sąsiuvinis |
![]() Mokytojo patarimai
Mokytojo patarimai
Sumodeliuokite kiekvieną trikčių šalinimo žingsnį mokiniams.
1 veiksmas: Pasiruošimas tyrinėjimui
Ar prieš pradėdami veiklą turite pasiruošę kiekvieną iš šių dalykų? Patikrinkite kiekvieną iš šių dalykų:
-
Ar varikliai prijungti prie tinkamų prievadų?
-
Ar išmanieji kabeliai iki galo įkišti į visus variklius?
-
Ar smegenys įjungtos?
-
Ar akumuliatorius įkrautas?
2 veiksmas: Pradėkite naują projektą
Norėdami pradėti projektą, atlikite šiuos veiksmus:
-
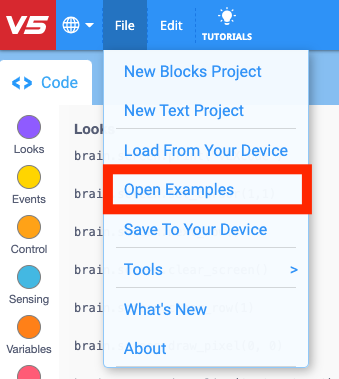
Atidarykite meniu Failas ir pasirinkite Atidaryti pavyzdžius.
-
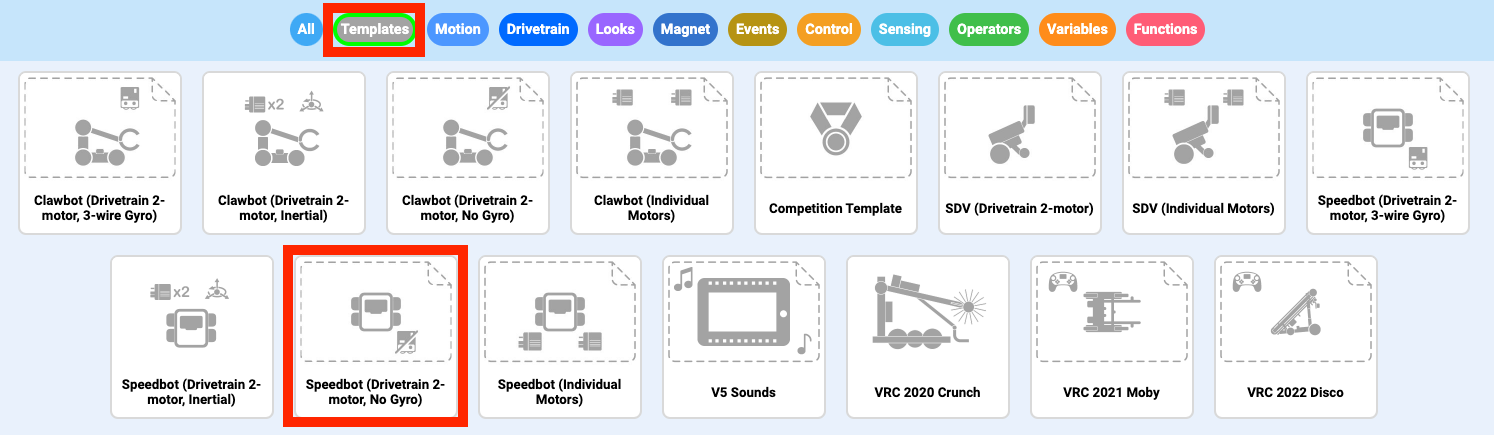
Pasirinkite ir atidarykite „Speedbot“ („Drivetrain 2-motor, No Gyro“) šablono projektą. Šablono projekte yra „Speedbot“ variklio konfigūracija. Jei šablonas nenaudojamas, jūsų robotas netinkamai vykdys projektą.
-
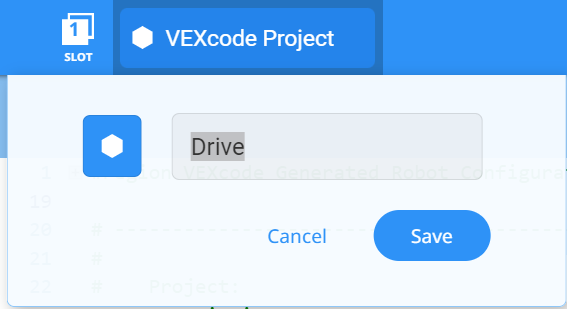
Kadangi dirbsite su Speedbot judėjimu pirmyn ir atgal, savo projektą pavadinsite Drive. Spustelėkite projekto pavadinimą, įveskite Drive ir pasirinkite Save.
![]() Mokytojo patarimai
Mokytojo patarimai
-
Projektų pavadinimuose gali būti tarpų tarp žodžių arba po jų.

-
Galite paprašyti mokinių prie projekto pavadinimo pridėti savo inicialus arba grupės pavadinimą. Tai padės atskirti projektus, jei paprašysite mokinių juos pateikti.
-
Kadangi tai yra pirmoji programa, kurią gali bandyti jūsų mokiniai, turėtumėte modeliuoti veiksmus ir paprašyti mokinių atlikti tuos pačius veiksmus. Tada mokytojas turėtų stebėti mokinius, kad įsitikintų, jog jie teisingai atlieka veiksmus.
-
Įsitikinkite, kad mokiniai meniu Failas pasirinko Atidaryti pavyzdžius.
-
Įsitikinkite, kad mokiniai pasirinko Speedbot (Drivetrain 2-motor, No Gyro) šablono projektą.
-
Galite atkreipti mokiniams dėmesį, kad puslapyje Pavyzdžiai yra keletas pasirinkimų. Kurdami ir naudodami kitus robotus, jie turės galimybę naudoti skirtingus šablonus.
- Patikrinkite, ar projekto pavadinimas Drive dabar yra lange įrankių juostos centre.

![]() Mokytojo įrankių rinkinys
Projektų
Mokytojo įrankių rinkinys
Projektų
-
Atkreipkite dėmesį, kad pirmą kartą atidarius VEXcode V5 langas buvo pažymėtas VEXcode Project. VEXcode Project yra numatytasis projekto pavadinimas, kai pirmą kartą atidaromas VEXcode V5. Kai projektas buvo pervadintas į Diską ir buvo išsaugotas, ekranas buvo atnaujintas, kad būtų rodomas naujas projekto pavadinimas. Naudojant šį įrankių juostos langą, lengva patikrinti, ar mokiniai naudoja tinkamą projektą.
-
Pasakykite mokiniams, kad jie dabar yra pasirengę pradėti savo pirmąjį projektą. Paaiškinkite mokiniams, kad atlikę kelis paprastus veiksmus, jie galės sukurti ir vykdyti projektą, kuris pajudins Speedbot į priekį.
-
Priminkite mokiniams išsaugoti savo projektus jiems dirbant. Python skyriuje iš VEX bibliotekos paaiškinama įrašymo praktika VEXcode V5.
![]() Mokytojo įrankių rinkinys
-
Sustokite ir aptarkite
Mokytojo įrankių rinkinys
-
Sustokite ir aptarkite
Tai yra geras taškas pristabdyti ir paprašyti mokinių peržiūrėti žingsnius, kurie ką tik buvo atlikti pradedant naują projektą VEXcode V5 individualiai arba grupėse. Paprašykite mokinių individualiai apmąstyti, prieš pasidalydami savo grupėje arba visai klasei.
3 veiksmas: Važiuokite pirmyn
Dabar esate pasirengę pradėti programuoti robotą važiuoti į priekį!
-
Prieš pradėdami programuoti, turime suprasti, kas yra instrukcija. Instrukcijoje yra trys dalys. Daugiau informacijos apie kodo spalvinimą VEXcode V5 Python, rasite šiame straipsnyje.
-
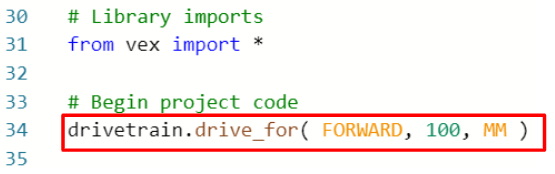
Pridėkite instrukcijas prie projekto:
![]() Mokytojo patarimai
Mokytojo patarimai
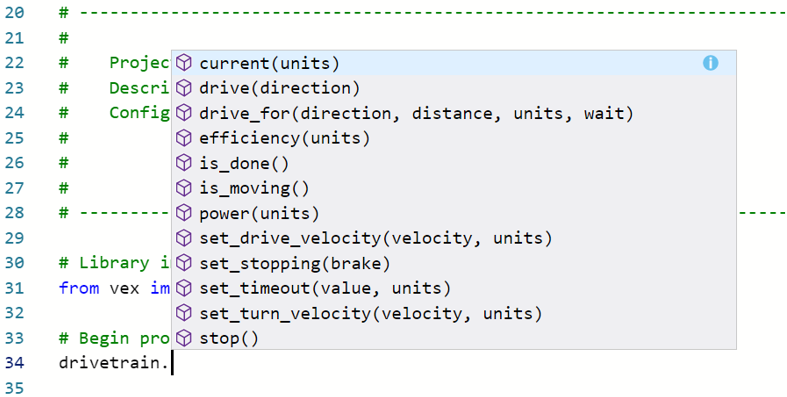
Pradėdami vesti nurodymą galite pastebėti automatinio užbaigimo funkciją. Mygtukais „aukštyn“ ir „žemyn“ pasirinkite norimą pavadinimą, tada klaviatūroje paspauskite „Tab“ arba (Enter/Return), kad pasirinktumėte. Norėdami gauti daugiau informacijos apie šią funkciją, peržiūrėkite Python straipsnį.
-
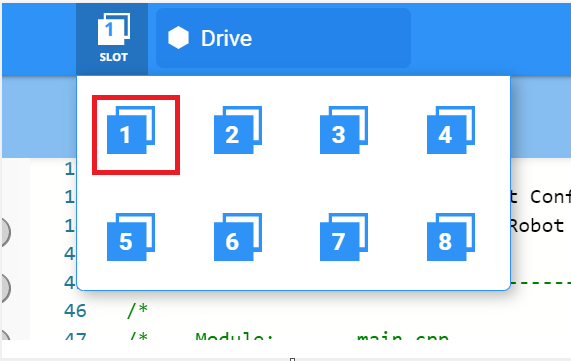
Pasirinkite lizdo piktogramą, kad pasirinktumėte vieną iš aštuonių galimų roboto smegenų lizdų ir pasirinkite 1 lizdą.
-
Prijunkite V5 Robot Brain prie kompiuterio naudodami mikro USB kabelį ir įjunkite V5 Robot Brain. Sėkmingai užmezgus ryšį, įrankių juostoje esanti smegenų piktograma tampa žalia .

-
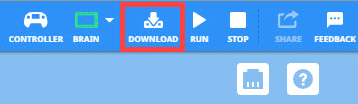
Pasirinkite Atsisiųsti , kad atsisiųstumėte projektą į smegenis.
![]() Mokytojo įrankių rinkinys
Mokytojo įrankių rinkinys
- Priminkite mokiniams atjungti USB kabelį nuo roboto smegenų. Jei vykdydamas projektą robotas prijungtas prie kompiuterio, jis gali traukti jungiamąjį laidą.
![]() Mokytojo įrankių rinkinys
-
Sustokite ir aptarkite
Mokytojo įrankių rinkinys
-
Sustokite ir aptarkite
Paprašykite mokinių nuspėti, kas, jų manymu, nutiks, kai šis projektas bus atsiųstas ir paleistas naudojant Speedbot. Pasakykite mokiniams savo prognozes įrašyti į savo inžinerijos sąsiuvinius. Jei laikas leidžia, paprašykite kiekvienos grupės pasidalyti savo prognozėmis.
-
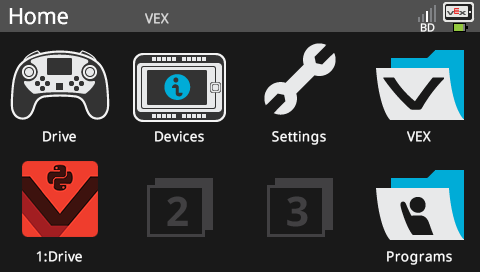
Patikrinkite, ar jūsų projektas atsisiųstas (Python) žiūrėdami į roboto smegenų ekraną. Projekto pavadinimas Diskas turėtų būti nurodytas 1 lizde.
![]() Mokytojo įrankių rinkinys
modelis
Mokytojo įrankių rinkinys
modelis
- Modeliuokite, kad projektas būtų vykdomas prieš klasę, kol visi mokiniai bando iš karto. Surinkite mokinius vienoje srityje ir palikite pakankamai vietos Speedbot judėti, jei jis pastatytas ant grindų.
- Pasakykite mokiniams, kad dabar jų eilė vykdyti savo projektą. Įsitikinkite, kad jie turi aiškų kelią ir kad joks „Speedbot“ nesusidurs.
-
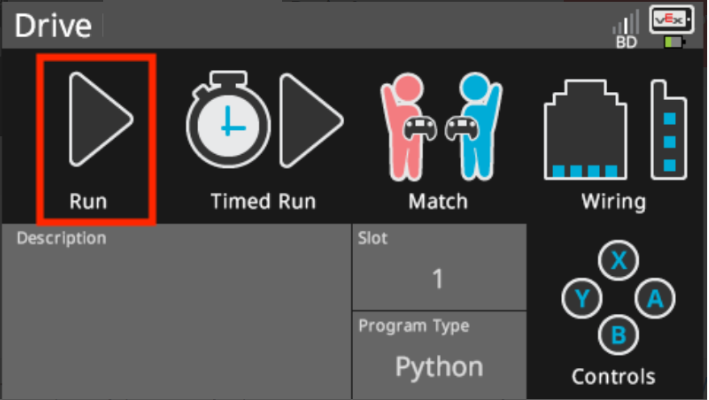
Vykdykite (Python) projektą robote, įsitikindami, kad projektas pasirinktas, tada paspauskite mygtuką Run ant roboto smegenų. Sveikiname sukūrus pirmąjį projektą!
4 veiksmas: Važiuokite atbuline eiga
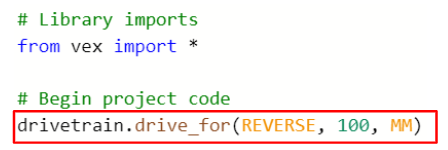
Dabar, kai užprogramavote savo robotą važiuoti į priekį, užprogramuosime jį važiuoti atbuline eiga.
-
Pakeiskite parametrą pavaros instrukcijoje į REVERSE vietoj FORWARD.
-
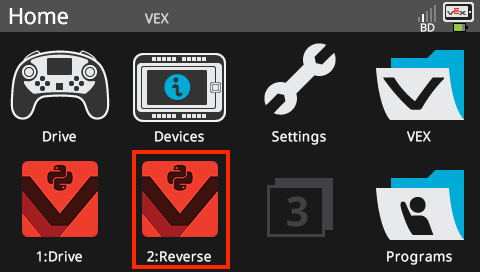
Pasirinkite projekto pavadinimą, kad pakeistumėte jį iš Drive į Reverse.

-
Pasirinkite lizdo piktogramą, kad pasirinktumėte naują lizdą. Pasirinkite 2 lizdą.

-
Atsisiųskite (Python) projektą.

-
Patikrinkite, ar jūsų projektas atsisiųstas (Python) žiūrėdami į roboto smegenų ekraną. Projekto pavadinimas Reverse turėtų būti nurodytas 2 lizde.
-
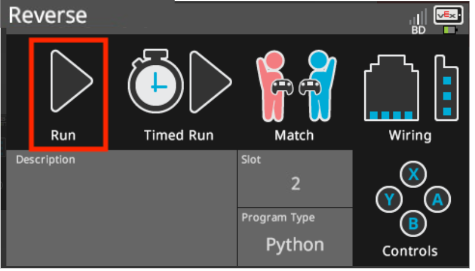
Vykdykite (Python) projektą robote, įsitikindami, kad projektas pasirinktas, tada paspauskite mygtuką Run ant roboto smegenų.
![]() Mokytojo įrankių rinkinys
veiksmo užbaigimas
Mokytojo įrankių rinkinys
veiksmo užbaigimas
-
Norėdami pakeisti komandą drive_for iš pirmyn į atgal, tiesiog pakeiskite pirmąjį parametrą į ATGALIA. Dėl to pavaros varikliai judės priešinga kryptimi.
-
mm skaičių galima keisti, tačiau šiame pavyzdyje paliksime juos 100 mm, kaip nustatyta ankstesniame žingsnyje.
-
Priminkite jiems, kad prieš vykdydami projektą atjunkite USB kabelį nuo Robot Brain.
-
Priminkite mokiniams išsaugoti savo projektus jiems dirbant. Python skyriuje iš VEX bibliotekos paaiškinama įrašymo praktika VEXcode V5.
5 veiksmas: Palaukite, tada važiuokite atbuline eiga
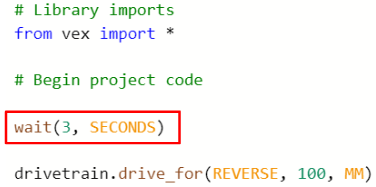
Dabar, kai užprogramavome robotą važiuoti pirmyn, o paskui atbuline eiga, dabar galime pridėti nurodymą laukti , kad robotas lauktų tam tikrą laiką prieš važiuodamas atbuline eiga.
-
Pridėkite laukimo nurodymą, kaip parodyta. Tai liepia robotui palaukti tris sekundes prieš važiuodamas atbuline eiga.
-
Pasirinkite projekto pavadinimą, kad pakeistumėte jį iš Reverse į WaitReverse.
-
Pasirinkite lizdo piktogramą, kad pasirinktumėte naują lizdą. Pasirinkite 3 lizdą.

-
Atsisiųskite (Python) projektą.
-
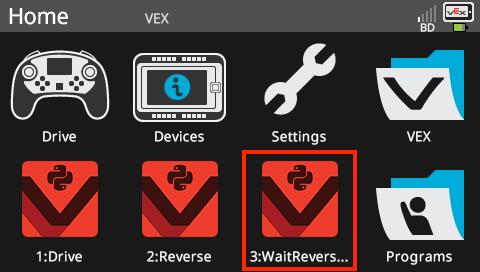
Patikrinkite, ar jūsų projektas atsisiųstas (Python) žiūrėdami į roboto smegenų ekraną. Projekto pavadinimas WaitReverse turėtų būti nurodytas 3 lizde.
-
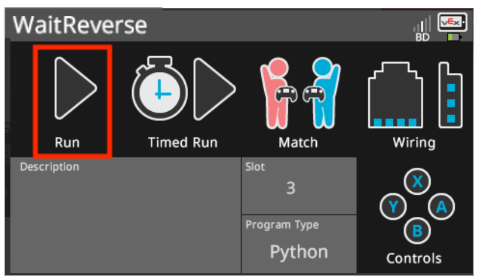
Paleiskite (Python) projektą robote, įsitikindami, kad projektas pasirinktas, tada paspauskite mygtuką Vykdyti .
![]() Mokytojo įrankių rinkinys
veiksmo užbaigimas
Mokytojo įrankių rinkinys
veiksmo užbaigimas
- Naudojant komandą laukti projektas neužbaigs, tik pristabdys roboto judėjimą.
- Jei mokiniai naudojasi kompiuteriu, priminkite jiems, kad prieš vykdydami projektą atjunkite USB kabelį nuo Robot Brain.
- Priminkite mokiniams išsaugoti savo projektus jiems dirbant. Python skyriuje iš VEX bibliotekos paaiškinama įrašymo praktika VEXcode V5.
6 veiksmas: Užbaikite krepšinio pratimų iššūkį!
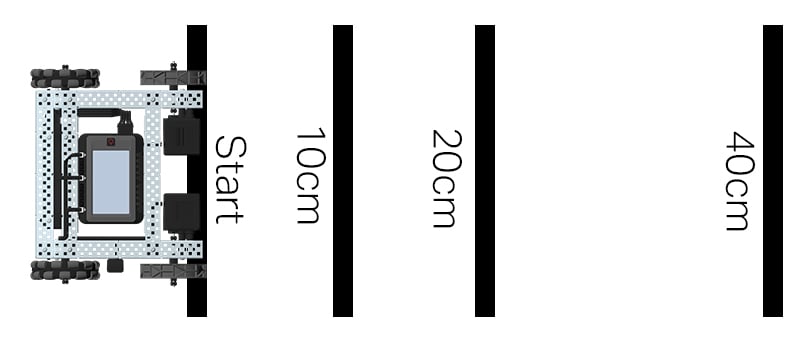
Krepšinio treniruočių iššūkio išdėstymas
Krepšinio pratybų iššūkyje robotas turi sugebėti naršyti linijas skirtingais atstumais. Robotas pajudės pirmyn iki pirmosios linijos, kuri yra 10 cm nuo pradinės padėties, palauks 1 sekundę, o tada važiuos atgal, grįždamas į tą pačią liniją. Tada robotas pakartos veiksmą, nuvažiuodamas į priekį 20 cm iki antrosios linijos, palaukdamas 1 sekundę ir važiuodamas atgal iki pradinės starto linijos. Robotas nuvažiuos į trečią liniją 40 cm atstumu, palauks 1 sekundę ir galiausiai grįš į starto liniją užbaigti iššūkio.
Prieš programuodami robotą, savo inžinerijos bloknote suplanuokite roboto kelią ir elgesį.
Įveikę krepšinio iššūkį, galėsite derinti judesius pirmyn ir atgal su papildomu roboto elgesiu, kad atliktumėte dar sudėtingesnius iššūkius.
Programuodami nepamirškite, kad 1 cm = 10 mm.
![]() Mokytojo įrankių rinkinys
-
Sprendimas
Mokytojo įrankių rinkinys
-
Sprendimas
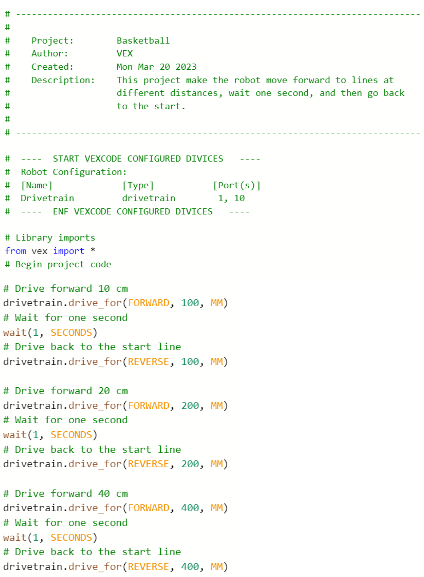
Peržiūrėkite toliau pateiktą sprendimo pavyzdį:
![]() Mokytojo įrankių rinkinys
-
Sustokite ir aptarkite
Mokytojo įrankių rinkinys
-
Sustokite ir aptarkite
Paprašykite mokinių poromis pasidalyti savo sprendimais prieš aptariant juos visa klase. Palengvinkite diskusiją klausdami:
- Ar programuodami šį iššūkį susidūrėte su sunkumais?
- Ar jūsų robotas elgėsi taip, kaip tikėjotės pagal savo projektą? Kodėl ar kodėl ne?
- Jei galėtumėte užbaigti iššūkį, ar yra ką nors, ką būtumėte darę kitaip?