
![]() Caixa de ferramentas do professor
-
Esboço da atividade
Caixa de ferramentas do professor
-
Esboço da atividade
Esta exploração apresentará aos alunos comportamentos básicos de programação de avanço, reversão e espera. Essas habilidades básicas os ajudarão a ter sucesso no Desafio Automed no final deste Laboratório STEM, quando navegarão pelo chão de um hospital usando o Speedbot.
O uso do projeto modelo V5 Speedbot (transmissão de 2 motores, sem giroscópio) permite que os alunos programem o Speedbot para avançar usando apenas uma instrução.
O Speedbot está pronto para se mover!
Esta exploração lhe dará as ferramentas para poder programar seu Speedbot para movimentos simples. No final desta atividade, você participará do Desafio de Exercícios de Basquete usando comportamentos de avanço, ré e espera.
![]() Caixa de ferramentas do professor
Caixa de ferramentas do professor
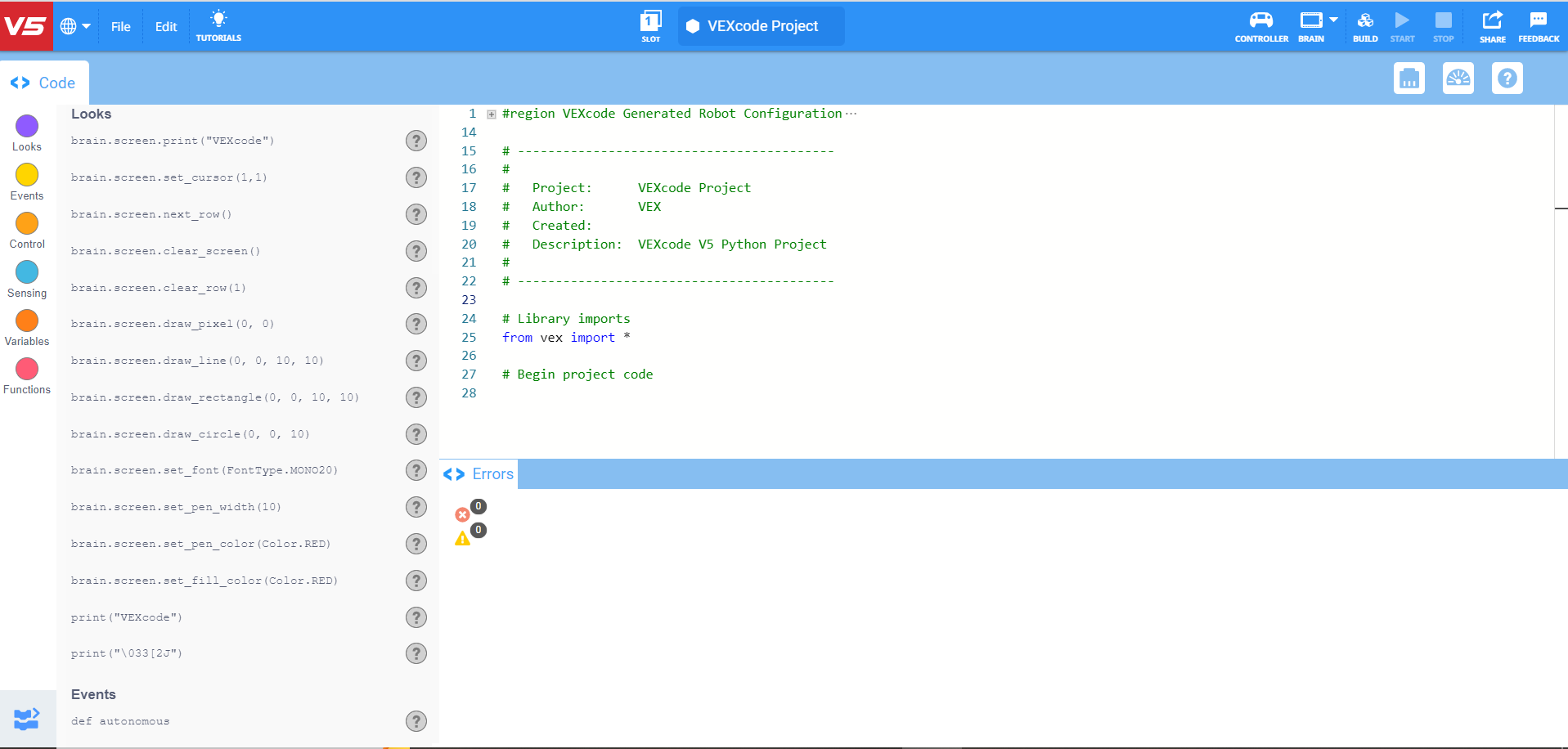
Aqui está uma visão geral da interface do usuário do VEXcode V5. Os alunos serão apresentados a essas guias/botões durante as atividades neste Laboratório Medbot STEM. Links também são fornecidos em todo o Laboratório STEM para fornecer mais informações sobre essas guias/botões.
-
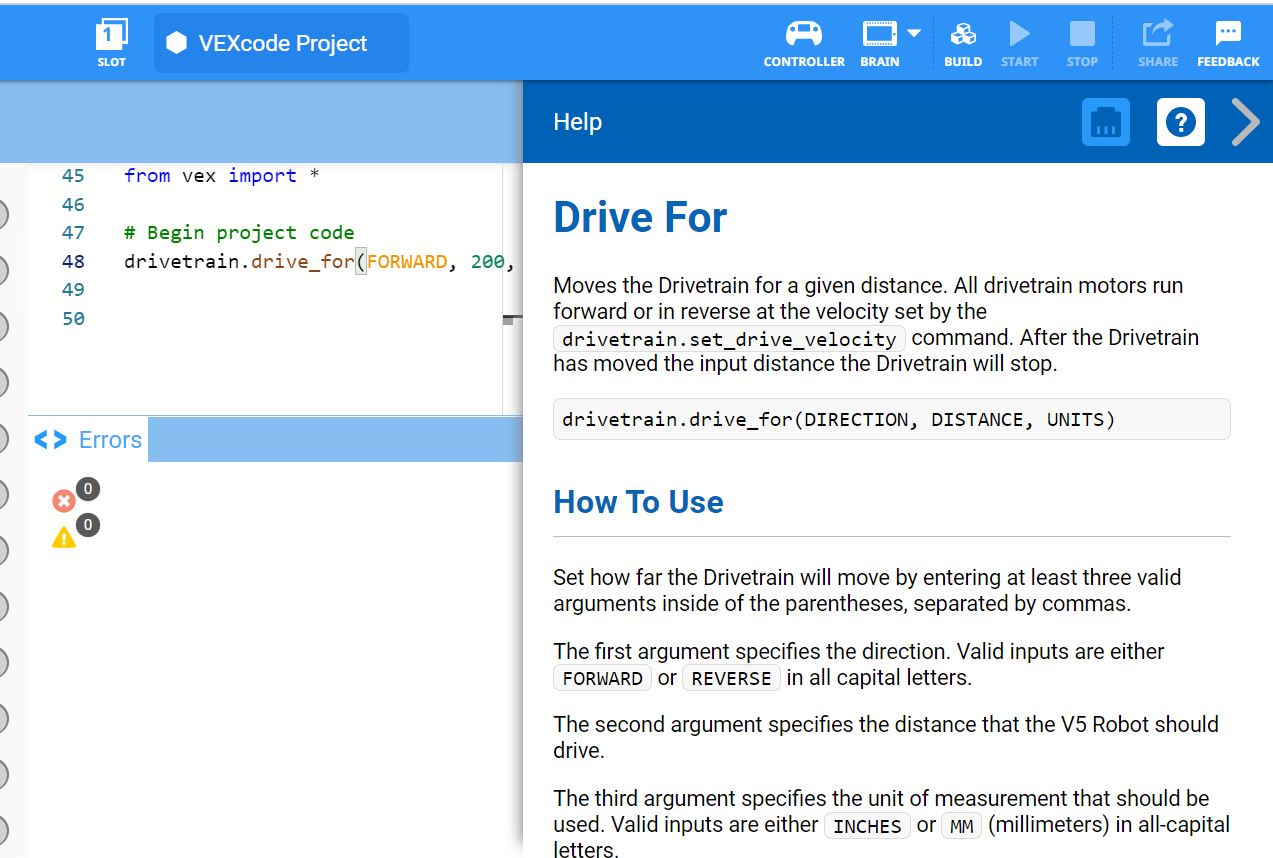
Instruções do VEXcode V5 que serão usadas nesta exploração:
-
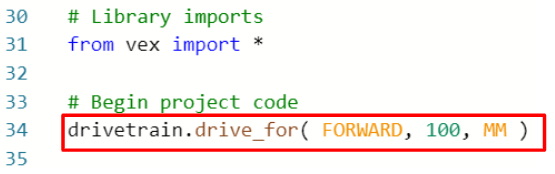
drivetrain.drive_for(AVANÇAR, 200, MM)
-
espere(1, segundos)
-
-
Para saber mais informações sobre as instruções, selecione Ajuda e selecione o ícone de ponto de interrogação ao lado de um comando para ver mais informações.
-
Certifique-se de ter o hardware necessário, seu notebook de engenharia e o VEXcode V5 baixado e pronto.
![]() Dicas para professores
Dicas para professores
Se esta for a primeira vez que o aluno utiliza o VEXcode V5, ele poderá consultar os Tutoriais a qualquer momento durante a exploração. Os Tutoriais estão localizados na Barra de Ferramentas. 
| Quantidade | Materiais necessários |
|---|---|
| 1 |
Robô Speedbot |
| 1 |
Bateria carregada do robô |
| 1 |
VEX código V5 |
| 1 |
Cabo USB (se estiver usando um computador) |
| 1 |
Caderno de Engenharia |
![]() Dicas para professores
Dicas para professores
Modele cada uma das etapas de solução de problemas para os alunos.
Etapa 1: Preparação para a Exploração
Antes de começar a atividade, você tem cada um desses itens prontos? Verifique cada um dos seguintes:
-
Os cabos inteligentes estão totalmente inseridos em todos os motores?
-
O Cérebro está ligado?
-
A bateria está carregada?
Etapa 2: Iniciar um novo projeto
Conclua as seguintes etapas para iniciar o projeto:
-
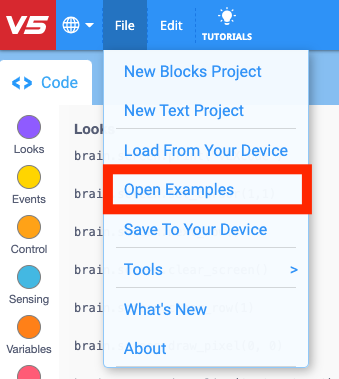
Abra o menu Arquivo e selecione Abrir exemplos.
-
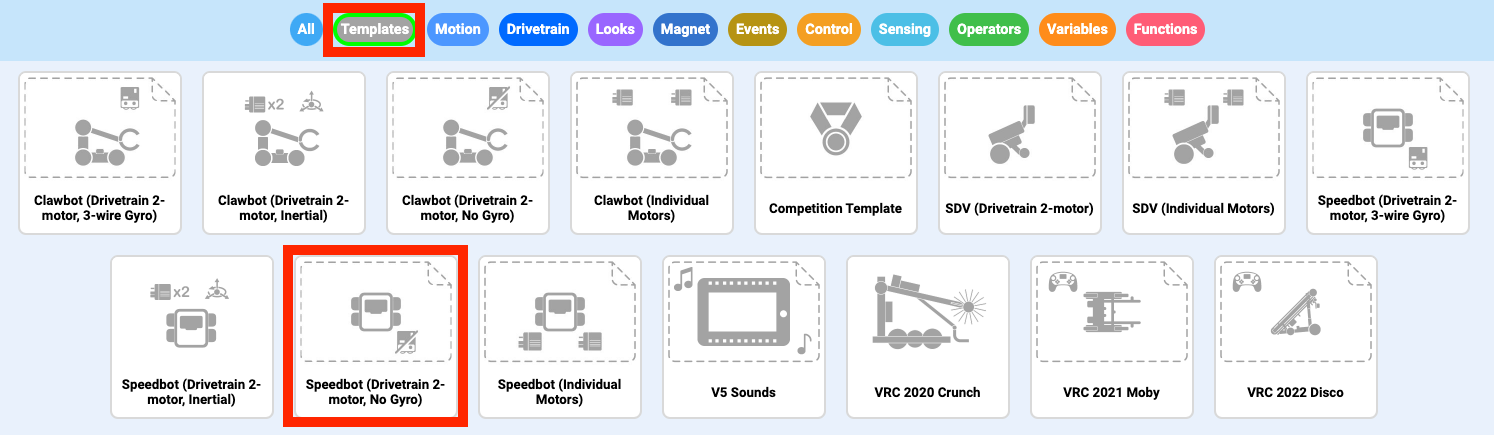
Selecione e abra o projeto modelo Speedbot (Drivetrain 2-motor, No Gyro). O projeto modelo contém a configuração do motor do Speedbot. Se o modelo não for usado, seu robô não executará o projeto corretamente.
-
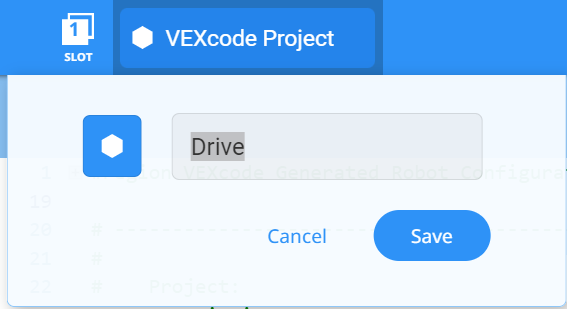
Como você estará trabalhando para mover o Speedbot para frente e para trás, nomeará seu projeto Drive. Clique no nome do projeto, digite Drive e selecione Salvar.
![]() Dicas para professores
Dicas para professores
-
Os nomes dos projetos podem ter espaços entre ou após as palavras.

-
Você pode pedir aos alunos que adicionem suas iniciais ou o nome do grupo ao nome do projeto. Isso ajudará a diferenciar os projetos se você pedir aos alunos que os enviem.
-
Como esta é a primeira atividade de programação que seus alunos podem tentar, você deve modelar as etapas e depois pedir aos alunos que concluam as mesmas ações. O professor deve então monitorar os alunos para garantir que eles estão seguindo as etapas corretamente.
-
Certifique-se de que os alunos tenham selecionado Abrir Exemplos no menu Arquivo.
-
Certifique-se de que os alunos tenham selecionado o projeto modelo Speedbot (Drivetrain 2-motor, No Gyro).
-
Você pode mostrar aos alunos que há diversas opções para escolher na página de Exemplos. À medida que constroem e usam outros robôs, eles terão a oportunidade de usar diferentes modelos.
- Verifique se o nome do projeto Drive está agora na janela no centro da barra de ferramentas.

![]() Caixa de ferramentas do professor
-
Salvando projetos
Caixa de ferramentas do professor
-
Salvando projetos
-
Saliente que quando eles abriram o VEXcode V5 pela primeira vez, a janela estava rotulada como VEXcode Project. Projeto VEXcode é o nome do projeto padrão quando o VEXcode V5 é aberto pela primeira vez. Depois que o projeto foi renomeado como Drive e salvo, a exibição foi atualizada para mostrar o novo nome do projeto. Utilizando esta janela da barra de ferramentas, é fácil verificar se os alunos estão utilizando o projeto correto.
-
Diga aos alunos que agora eles estão prontos para iniciar seu primeiro projeto. Explique aos alunos que, seguindo apenas alguns passos simples, eles serão capazes de criar e executar um projeto que fará avançar o Speedbot.
-
Lembre os alunos de salvar seus projetos enquanto trabalham. A seção Python da Biblioteca VEX explica as práticas de salvamento no VEXcode V5.
![]() Caixa de ferramentas do professor
-
Pare e discuta
Caixa de ferramentas do professor
-
Pare e discuta
Este é um bom ponto para fazer uma pausa e fazer com que os alunos revisem as etapas que acabaram de ser concluídas ao iniciar um novo projeto no VEXcode V5 individualmente ou em grupos. Peça aos alunos que reflitam individualmente antes de compartilhar com o grupo ou com toda a turma.
Etapa 3: Avançar
Agora você está pronto para começar a programar o robô para avançar!
-
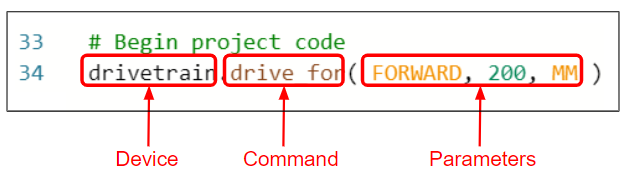
Antes de começarmos a programar, precisamos entender o que é uma instrução. Existem três partes em uma instrução. Para obter mais informações sobre a colorização do código no VEXcode V5 Python, consulte este artigo.
-
Adicione a instrução ao projeto:
![]() Dicas para professores
Dicas para professores
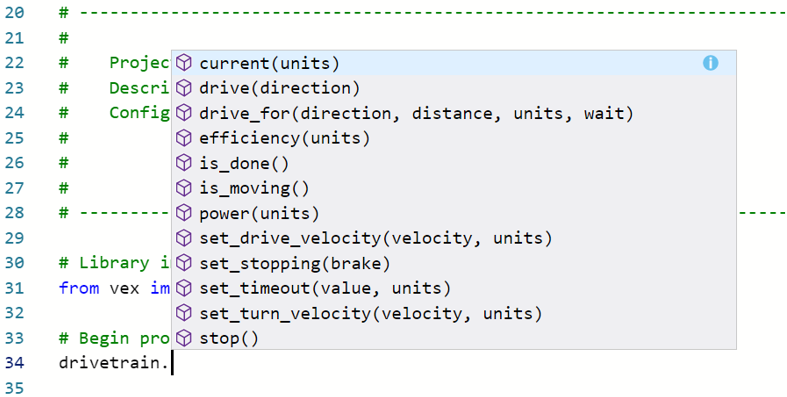
Você pode notar uma função de preenchimento automático ao começar a digitar a instrução. Use as teclas “Para cima” e “Para baixo” para selecionar o nome desejado e pressione “Tab” ou (Enter/Return) no teclado para fazer a seleção. Para obter mais informações sobre esse recurso, consulte o artigo Python.
-
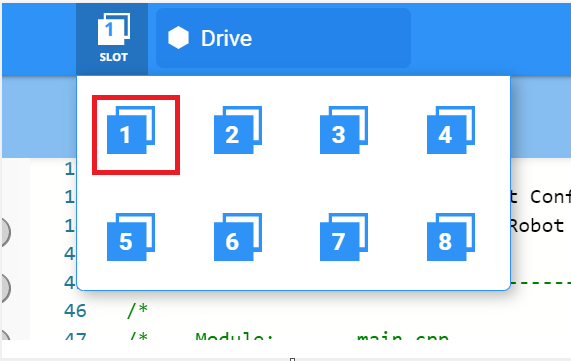
Selecione o ícone Slot para escolher um dos oito slots disponíveis no Robot Brain e selecione o slot 1.
-
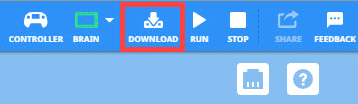
Conecte o V5 Robot Brain ao computador usando um cabo micro USB e ligue o V5 Robot Brain. O ícone do Cérebro na barra de ferramentas fica verde assim que uma conexão bem-sucedida for feita.

-
Selecione Download para baixar o projeto para o Brain.
![]() Caixa de ferramentas do professor
Caixa de ferramentas do professor
- Lembre os alunos de desconectarem o cabo USB do Cérebro Robô. Ter o robô conectado a um computador durante a execução de um projeto pode fazer com que o robô puxe o cabo de conexão.
![]() Caixa de ferramentas do professor
-
Pare e discuta
Caixa de ferramentas do professor
-
Pare e discuta
Peça aos alunos que prevejam o que acham que acontecerá quando este projeto for baixado e executado no Speedbot. Peça aos alunos para registrarem suas previsões em seus cadernos de engenharia. Se o tempo permitir, peça a cada grupo que partilhe a sua previsão.
-
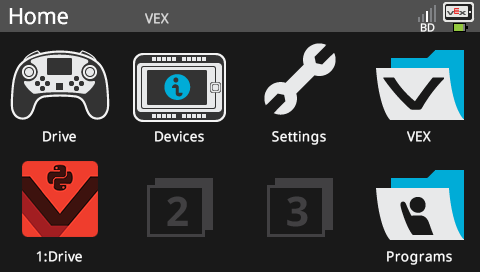
Verifique se o seu projeto foi (Python) olhando a tela do Robot Brain. O nome do projeto Drive deve estar listado no Slot 1.
![]() Caixa de ferramentas do professor
-
modelo primeiro
Caixa de ferramentas do professor
-
modelo primeiro
- Modele a execução do projeto na frente da turma antes de todos os alunos tentarem ao mesmo tempo. Reúna os alunos em uma área e deixe espaço suficiente para o Speedbot se mover se for colocado no chão.
- Diga aos alunos que agora é a vez deles executarem o projeto. Certifique-se de que eles tenham um caminho livre e que nenhum Speedbots se esbarre.
-
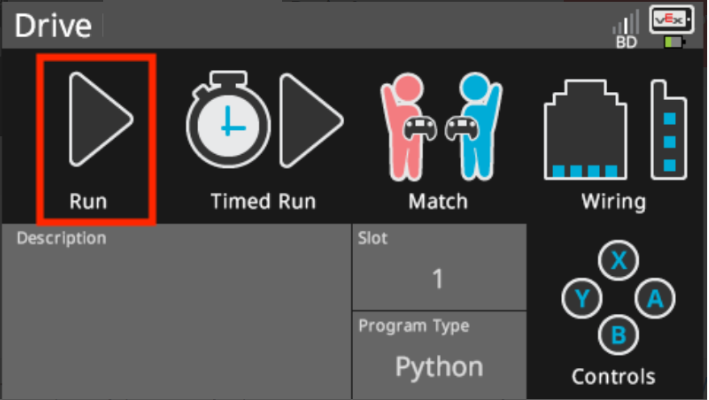
Execute (Python) o projeto no robô, certificando-se de que o projeto esteja selecionado e, em seguida, pressione o botão Run no Robot Brain. Parabéns por criar seu primeiro projeto!
Etapa 4: direção reversa
Agora que você programou seu robô para avançar, vamos programá-lo para dirigir em marcha à ré.
-
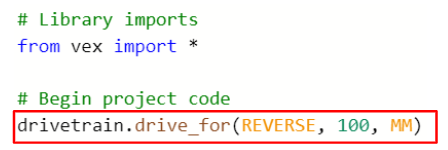
Altere o parâmetro na instrução do inversor para REVERSE em vez de FORWARD.
-
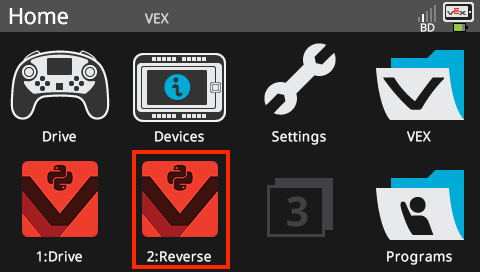
Selecione o nome do projeto para alterá-lo de Drive para Reverse.

-
Selecione o ícone Slot para escolher um novo slot. Selecione o slot 2.

-
Baixe (Python) o projeto.

-
Verifique se o seu projeto foi (Python) olhando a tela do Robot Brain. O nome do projeto Reverse deve estar listado no Slot 2.
-
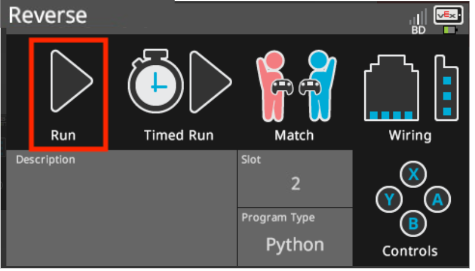
Execute (Python) o projeto no robô, certificando-se de que o projeto esteja selecionado e, em seguida, pressione o botão Run no Robot Brain.
![]() Caixa de ferramentas do professor
-
Concluindo a etapa 4
Caixa de ferramentas do professor
-
Concluindo a etapa 4
-
Para alterar o comando drive_for de forward para reverse, basta alterar o primeiro parâmetro para REVERSE. Isso fará com que os motores do trem de força se movam na direção oposta.
-
O número de mm pode ser alterado, mas para este exemplo deixaremos em 100 mm conforme definido no passo anterior.
-
Lembre-os de desconectar o cabo USB do Robot Brain antes de executar o projeto.
-
Lembre os alunos de salvar seus projetos enquanto trabalham. A seção Python da Biblioteca VEX explica as práticas de salvamento no VEXcode V5.
Etapa 5: Espere e dirija em marcha à ré
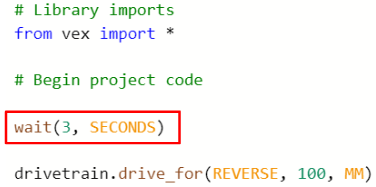
Agora que programamos o robô para avançar e depois dar ré, podemos adicionar uma instrução wait para que o robô espere um certo tempo antes de dirigir em ré.
-
Adicione uma instrução wait conforme mostrado. Isso diz ao robô para esperar três segundos antes de dar ré.
-
Selecione o nome do projeto para alterá-lo de Reverse para WaitReverse.
-
Selecione o ícone Slot para escolher um novo slot. Selecione o slot 3.

-
Baixe (Python) o projeto.
-
Verifique se o seu projeto foi (Python) olhando a tela do Robot Brain. O nome do projeto WaitReverse deve estar listado no Slot 3.
-
Execute (Python) o projeto no robô certificando-se de que o projeto esteja selecionado e pressione o botão Run .
![]() Caixa de ferramentas do professor
-
Concluindo a etapa 5
Caixa de ferramentas do professor
-
Concluindo a etapa 5
- Usar um comando wait não encerrará o projeto, apenas pausará o movimento robótico.
- Se os alunos estiverem usando um computador, lembre-os de desconectar o cabo USB do Robot Brain antes de executar o projeto.
- Lembre os alunos de salvar seus projetos enquanto trabalham. A seção Python da Biblioteca VEX explica as práticas de salvamento no VEXcode V5.
Etapa 6: Complete o desafio de treinos de basquete!
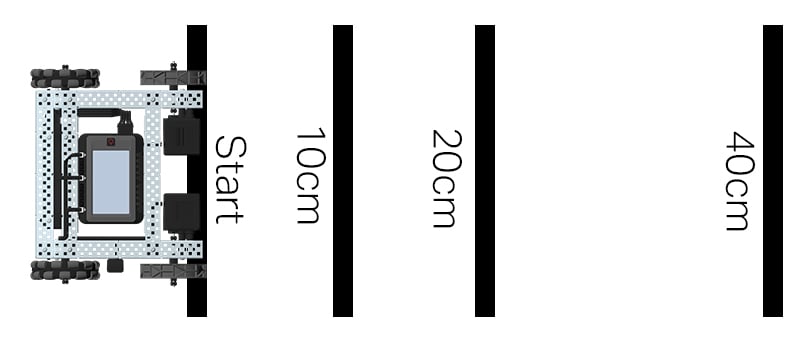
Layout do Desafio de Treinos de Basquete
No Basketball Drills Challenge, o robô deve ser capaz de navegar por uma série de linhas em diferentes distâncias. O robô irá avançar até a primeira linha que está a 10 cm da posição inicial, esperar 1 segundo e depois retroceder retornando à mesma linha. O robô então repetirá a ação avançando 20 cm até a segunda linha, aguardando 1 segundo e então dirigindo para trás até a linha de partida original. O robô avançará até a terceira linha com uma distância de 40 cm, aguardará 1 segundo e finalmente retornará à linha de partida para finalizar o desafio.
Antes de programar o robô, planeje o caminho e os comportamentos do robô em seu caderno de engenharia.
Depois de completar o Desafio de Basquete, você poderá combinar movimentos para frente e para trás com comportamentos adicionais do robô para completar desafios ainda mais avançados.
Tenha em mente ao programar que 1 cm = 10 mm.
![]() Caixa de ferramentas do professor
-
solução
Caixa de ferramentas do professor
-
solução
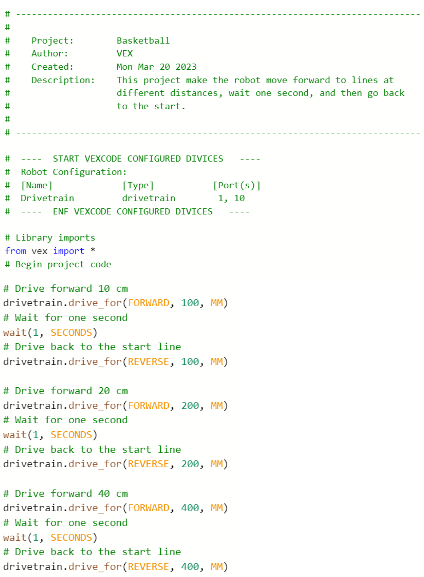
Veja um exemplo de solução abaixo:
![]() Caixa de ferramentas do professor
-
Pare e discuta
Caixa de ferramentas do professor
-
Pare e discuta
Peça aos alunos que compartilhem suas soluções em pares antes de discuti-las com toda a turma. Facilite a discussão perguntando:
- Você enfrentou alguma dificuldade ao programar este desafio?
- Seu robô se comportou como você esperava com base no seu projeto? Por que ou por que não?
- Se você pudesse repetir o desafio, há algo que você teria feito diferente?