
Ontwerp, ontwikkel en herhaal uw project - C++
Beantwoord de volgende vragen in je technische notitieblok terwijl je je project ontwerpt.
-
Wat wil je dat het project de robot laat doen? Leg uit met details.
-
Welke stappen ga je volgen om het project te testen? Leg uit met details.
-
Hoe kan uw robot worden geprogrammeerd om de taak zo nauwkeurig mogelijk uit te voeren? Leg uit met details.
![]() Toolbox voor leraren
-
antwoorden
Toolbox voor leraren
-
antwoorden
-
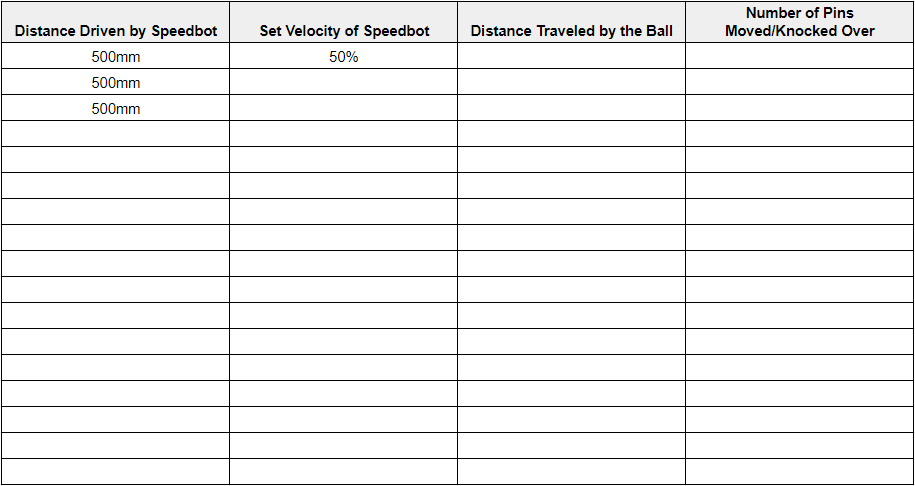
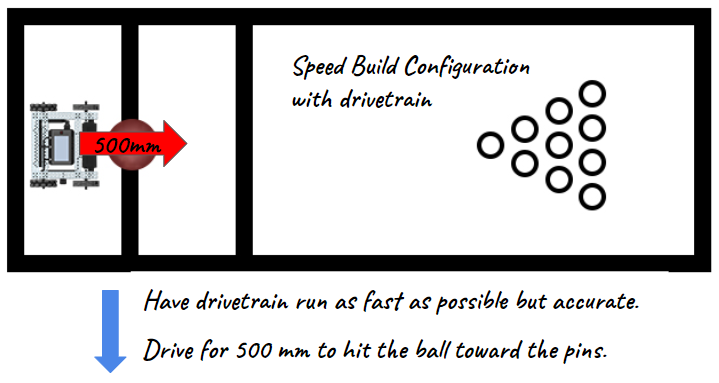
Antwoorden zullen waarschijnlijk zijn dat je snel en ver genoeg moet rijden om de bal met optimale kracht te kunnen bereiken en vooruit te kunnen duwen, terwijl de nauwkeurigheid behouden blijft. Vraag de leerlingen om uit te leggen hoe de botsingen van de robot met de bal en van de bal met de pinnen van invloed waren op hun plannen. Koppel dit aan de tweede wet van Newton. Leerlingen willen de robot waarschijnlijk zo instellen dat hij met een snelheid van 100% rijdt. Maar wees u ervan bewust dat, hoewel de hoogste snelheid voor de robot zou leiden tot de grootste versnelling van de bal en vervolgens de pinnen na de botsing, de hoogste snelheid voor de robot de nauwkeurigheid bij deze uitdaging in gevaar zou kunnen brengen. Ze moeten een compromis vinden tussen de twee. Ze kunnen de nieuwe tabel hieronder of hun vorige tabellen gebruiken om gegevens te verzamelen en de beste snelheid voor deze uitdaging te bepalen.
-
De antwoorden moeten bestaan uit het schrijven van pseudocode, het meten van de afstand die de robot moet afleggen, het omrekenen van die meting naar millimeters en het uitvoeren van het project. Zorg ervoor dat leerlingen begrijpen hoe ze centimeters of meters naar millimeters kunnen omrekenen voor programmering.
-
Om centimeters naar millimeters om te rekenen, moet u een nul aan het einde van het gehele getal toevoegen. Bijvoorbeeld, 10 cm is gelijk aan 100 mm.
-
Om meters naar millimeters om te rekenen, moet u drie nullen aan het einde van het gehele getal toevoegen. Bijvoorbeeld, 1 m is gelijk aan 1000 mm.
-
-
Antwoorden kunnen bestaan uit het meten van de exacte afstand tussen de startlocatie van de robot en de startpositie van de bal. Die meting kan vervolgens worden gebruikt om de precieze afstand te programmeren die de robot moet afleggen. Het is bovendien belangrijk om de optimale rijsnelheid te vinden, waarbij de nauwkeurigheid behouden blijft.
Volg de onderstaande stappen bij het maken van je project:
- Plan het pad dat u uw robot wilt laten volgen met behulp van tekeningen en pseudocode (Google / .docx / .pdf).
- Gebruik de pseudocode die je hebt gemaakt om je project te ontwikkelen.
- Test uw project regelmatig in C++ en voer iteraties uit met behulp van wat u hebt geleerd tijdens het testen. Noteer na elke proef hoe ver de robot reed, wat de snelheid was, hoe ver de bal reikte en hoeveel pinnen werden verplaatst. Hier is een bijgewerkte tabel voor het verzamelen en analyseren van gegevens.
![]() Tips voor leraren
Tips voor leraren
- De tabel voor de Strike Challenge kan hier worden gedownload en afgedrukt (Google/ .pdf), of studenten kunnen de tabel in hun technische notitieboekjes namaken.
-
Vraag de leerlingen om een liniaal te gebruiken om het pad dat ze willen volgen, op te meten. Laat de leerlingen vervolgens hun pseudocode evalueren voordat ze doorgaan naar de tweede stap.
-
Geef studenten de opdracht om pseudocode te gebruiken als commentaar in hun project. Dit helpt bij de organisatie, flow en het oplossen van problemen. Vraag de leerlingen om hun pseudocode te evalueren voordat ze instructies aan hun projecten toevoegen. U kunt hier een pseudocoderubriek downloaden (Google / .docx / .pdf). Bekijk het onderstaande voorbeeld ter referentie terwijl u leerlingen helpt de uitdaging te voltooien:
int main() { // Robotconfiguratie initialiseren. NIET VERWIJDEREN! vexcodeInit(); // Begin projectcode // Stel de aandrijfsnelheid in op meer dan 50% om de bal verder te duwen Drivetrain.setDriveVelocity(65, percent); // Rijd 500 mm vooruit om met de bal te botsen Drivetrain.driveFor(forward, 500, mm); } - Terwijl de testfase vordert, bekijkt u de datatabellen van de leerlingen en vraagt u de groepen uit te leggen hoe ze de beste snelheid voor de uitdaging hebben gekozen. De twee belangrijkste variabelen waarop ze zich moeten richten, zijn de snelheid van de robot en het aantal verplaatste pinnen. Ook de geschatte afstand die de bal aflegt, kan in overweging worden genomen. Stimuleer nogmaals testen waarbij slechts één variabele tegelijk wordt gemanipuleerd: de snelheid van de robot.